Электромеханические характеристики асинхронного двигателя.
Для асинхронного двигателя существуют два типа электромеханических характеристик
I1(S) – ток статора от скольжения;
I’2(S) – ток ротора от скольжения.
В выражении для зависимости I’2(S) получают из схемы замещения асинхронного двигателя
 .
.
Из этого уравнения следует, что при S®0 ток I’2 стремится к предельному значению равному
 .
.
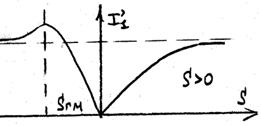
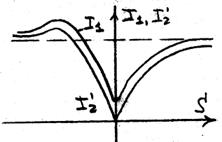
Из графика видно, что при скольжении S>0 функция I’2(S) возрастает монотонно, а при скольжении меньше нуля функция имеет максимум  при скольжении
при скольжении  . Причем функция I’2(S) в генераторном режиме стремится к предельному значению сверху. Если для двигателей малой мощности а»1, то Sгм=-1.
. Причем функция I’2(S) в генераторном режиме стремится к предельному значению сверху. Если для двигателей малой мощности а»1, то Sгм=-1.
Для крупных машин а®1, то Sгм=-¥.
Но удобно для асинхронного двигателя пользоваться электромеханической характеристикой, выраженной через параметры Мк, Sк, а как в формуле для момента:
 ;
;  ;
;
 ;
;  (А);
(А);
 ;
;  ;
;  (В).
(В).
Делим (А) на (В)
 ;
;
 ;
;  ;
;  ;
;  .
.
Из последней формулы можно определить значение предельного тока I’2пред
S®¥  ;
;  ;
;
Sни – скольжение на характеристики, где момент номинальный.
 ;
;  .
.
Предельное значение тока ротора можно выразить через предельное значение следующим образом:
Ток ротора интенсивно растет до критического значения Sк до значения 0,71I’2пр.
Для линейного участка скоростная характеристика выглядит следующим образом:
 .
.
Электромеханическая характеристика I1(S) можно получить, используя векторную диаграмму асинхронного двигателя:
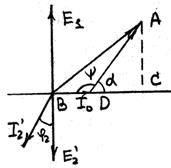
 ;
;
 ;
;  ;
;  ;
; 
 .
.
Дата добавления: 2016-02-09; просмотров: 2169;