Поворотно-фиксирующие механизмы
Поворотно-фиксирующие механизмы, применяемые в точных станках для поворота и установки в точное угловое положение узлов станка и обрабатываемых деталей, часто имеют сложную структуру. Различные требования к качеству и компоновочные особенности станков определили большое число типов применяемых механизмов с электромеханическим, гидравлическим, пневмомеханическим и пневматическим приводом (рис.107). Например, применяют револьверные головки (рис.108) с вращающимся и невращающимся инструментом, с подачей всей револьверной головки и с подачей в рабочей позиции лишь одного инструмента с вертикальной, горизонтальной и наклонной осью поворота, с различными циклами работы.


Электромеханические поворотные устройства. В оборудовании массового производства наибольшее распространение получили кулачковые, мальтийские, рычажно-храповые и кулисные механизмы. В связи с повышением требований к быстроте переналадки поворотных устройств на различное число позиций все большее применение находят устройства с регулируемой частотой вращения электродвигателя, получившие преимущественное применение в станках с ЧПУ и промышленных роботах.
При невысоких требованиях к точности позиционирования, кратковременном выстое и необходимости обратного хода применяют зубчато-рычажные, кулачково-зубчато-рычажные и цепные механизмы.
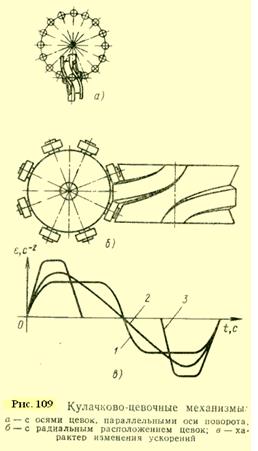
Кулачково-цевочные механизмы (рис.109) отличаются наиболее высокой быстроходностью. Их проектируют с цевками, оси .которых параллельны оси поворота узла., и со звездообразно расположенными цевками. Последняя конструкция хорошо зарекомендовала себя особенно при малом числе позиций и является перспективной для применения в поворотных столах. При выборе закона движения учитывается требуемое быстродействие и возникающая инерционная нагрузка. Закон изменения ускорений, характеризуемый кривой 1 (рис.109, в), применяют при высоких скоростях поворота и небольшом моменте инерции поворачиваемого узла; закон, характеризуемый кривой 2, — при больших моментах инерции, которые ограничивают допустимую скорость и требуют плавного замедления движения.. Закон изменения (кривая 3) применяют при постоянной скорости вращения выходного звена на большей части цикла поворота, малом числе позиций и небольших нагрузках.
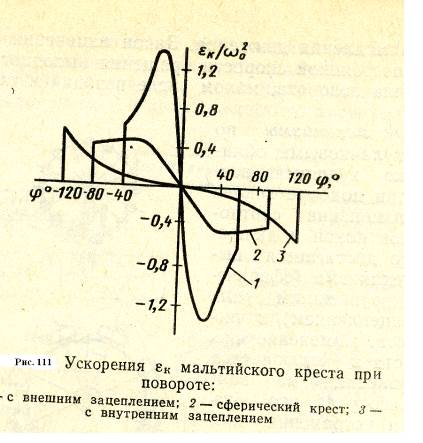
Мальтийские механизмы по сравнению с кулачковыми обладают несколько худшими возможностями при подборе закона движения и изменении соотношения периодов покоя и движения. Здесь это достигается выбором типа механизма (сферический, плоский, с внешним или внутренним зацеплением) и числа пазов креста. Изменение числа пазов креста ZК, исключается,. если крест закреплен на вал} поворачиваемого узла, что благоприятно для устранения влияния зазоров в промежуточной зубчатой передаче. На рис. 111 приведены кривые, характеризующие изменение угловых скоростей для всех типов механизмов при Zк=6. Наибольшие ускорения εК возникают у мальтийского механизма с внешним зацеплением (кривая 1). У этого механизма рабочий угол φ поворота поводка наименьший (φ = 120°). Наибольший угол φ у механизма с внутренним зацеплением (φ =240°). Наименьший уровень ускорений у сферического мальтийского механизма (кривая 2), при любом z к у них φ =180°. Начальное ускорение ни у одного из мальтийских механизмов не равно нулю.
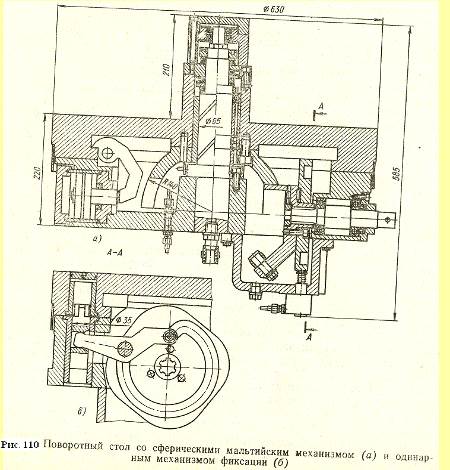
Сферические мальтийские механизмы имеют взаимно перпендикулярные оси креста и поводка, что позволяет создавать компактные конструкции (рис.110). В станкостроении их широко применяют в агрегатных станках с барабанными приспособлениями. Мальтийские механизмы с внутренним зацеплением часто используются в поворотных столах агрегатных станков, а кулисные механизмы, имеющие те же кинематические характеристики, — в вертикальных многошпиндельных токарных полуавтоматах. В автоматах с распределительными валами, в поворотных столах в тех случаях, когда ограничено значение угла φ наиболее часто применяют мальтийские механизмы с внешним зацеплением с прямолинейными пазами.
Максимальная угловая скорость мальтийского креста

(1.26)
Где ik max – максимальное передаточное отношение; ω0 – угловая скорость поводка.
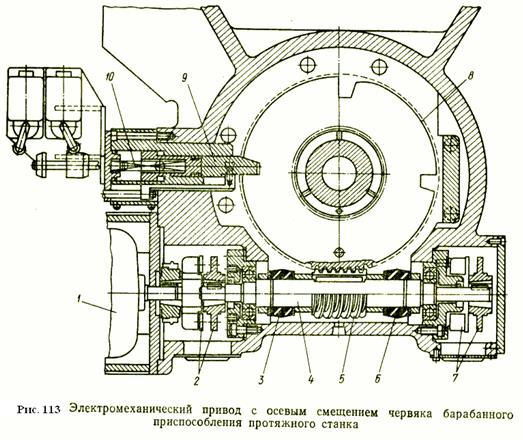
Червячные и зубчатые механизмы с электродвигателем. Прерывистость движения в таких механизмах создается или за счет применения муфты или путем остановки электродвигателя. Их используют в делительных устройствах и в поворотных столах низкой и средней быстроходности. В конструкциях с осевым смещением червяка 5 (рис.113) применяют пружины и неопреновые амортизаторы 3, 6. Благодаря сжатию пружин 3 повышается плавность разгона узла электродвигателем 1 (Nдв=1,1 кВт). Червячное колесо и делительный диск 8 закреплены на валу барабана загрузочного приспособления, поворачивающегося на конических роликовых подшипниках. Фиксатор 9 прижимается к диску 8 пружиной 10 еще до окончания поворота. Профиль диска облегчает заскакивание клиновидного фиксатора в паз диска. Червяк включается и выключается с помощью электромагнитной муфты 2. При выключении муфты вал 4 останавливает тормоз 7.
Гидравлические поворотные устройства. Одно из наиболее распространенных устройств с гидроцилиндром с рейкой 1 и зубчатой передачей 2 показано на рис. 6.46. Планшайба 3 стола фиксируется цилиндрическим фиксатором 4 с помощью штока гидроцилиндра 5. Шток соединен с рычагом 6, прижимающим планшайбу к направляющим после ее фиксации.
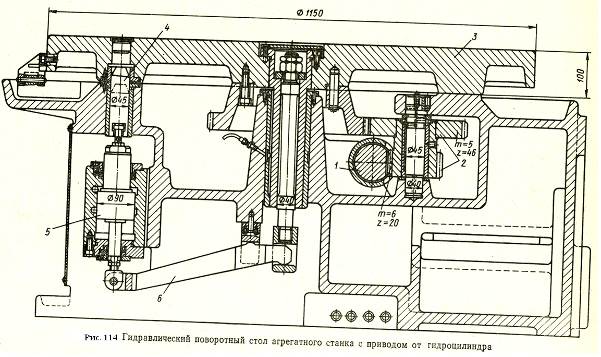
Получили применение поворотные устройства с гидромотором (рис.113). При повороте стола 3 или барабана скорость его снижается путем введения червячной передачи 2. Гидромотор 1 в конце поворота реверсируется, упор стола 5 прижимается к фиксатору 4, вводимому пружиной 6. У барабанных приспособлений для повышения надежности фиксации устанавливают дополнительный фиксатор, вводимый гидроцилиндром. Осевое смещение барабана для его зажима осуществляется винтовым механизмом. У стола планшайба 3 прижимается к направляющим с помощью гидроцилиндра 7.

Пневматические поворотные устройства. Механизм с пневмоцилиндром поворачивает планшайбу с помощью штока, рычага с подпружиненной собачкой. В конце поворота рычага собачка прижимается к неподвижному упору. Он предупреждает перебег планшайбы и обеспечивает заклинивание собачки.
Механизмы фиксации. Фиксирующие устройства широко применяют в устройствах линейного и особенно углового позиционирования (рис 116). Они предназначены для точной установки выходного звена механизма позиционирования и предотвращения его смещения под действием сил, возникающих в процессе обработки. В ряде случаев для этого приходится дополнительно применять специальные механизмы зажима (прижима к направляющим) узла.
Механизмы предварительной фиксации применяют в быстроходных фиксирующих устройствах. Они предварительно устанавливают в заданное положение выходное или одно из промежуточных звеньев механизма и предотвращают несрабатывание основного механизма фиксации из-за неточного позиционирования при повороте или линейном позиционировании узла. Для гашения колебаний используют демпфирующие устройства. Их применяют в зуборезных и зубошлифовальных станках, токарных автоматах и полуавтоматах, многопозиционных агрегатных станках и автоматических линиях, станках с ЧПУ и многоцелевых станках, манипуляторах и автооператорах, различных загрузочных и транспортных устройствах.
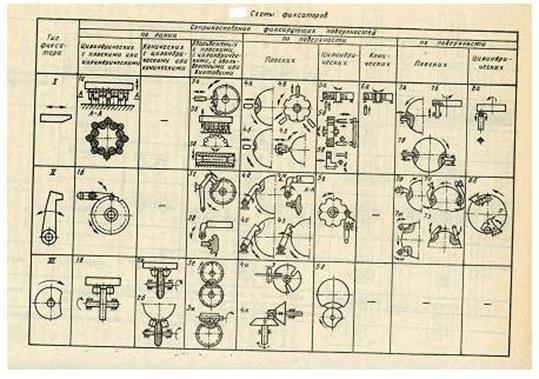
Фиксируемые узлы отличаются друг от друга по форме (табл.31), габаритным размерам, массе, моментам инерции, числу позиций (шагу), действующим внешним нагрузкам, требованиям к точности позиционирования и быстроходности, что определяет разнообразие способов фиксации (табл.32) и типов устройств, применяемых для фиксации обрабатываемых деталей, делительных шпинделей, револьверных головок, столов, суппортов, шпиндельных блоков, конвейеров периодического действия, магазинов и других узлов.
Типы фиксаторов и схемы механизмов фиксации. Фиксаторы отличают по способам ввода: поступательные (тип I), качающиеся (тип II), вращающиеся (тип III); по форме, числу и сочетаниям фиксирующих (табл.32) и направляющих поверхностей, определяющих надежность ввода, удельные нагрузки на направляющие и фиксирующие поверхности, выборку зазоров, возможность компенсации износа, регулирования в целях повышения точности и предотвращения нежелательных пространственных смещений фиксируемого узла. Механизмы с точечным .контактом фиксирующих поверхностей применяют лишь при предварительной фиксации. Различают механизмы с усреднением ошибок изготовления фиксирующих поверхностей (табл.32, механизмы la, 36, 3е) и без усреднения этих ошибок.
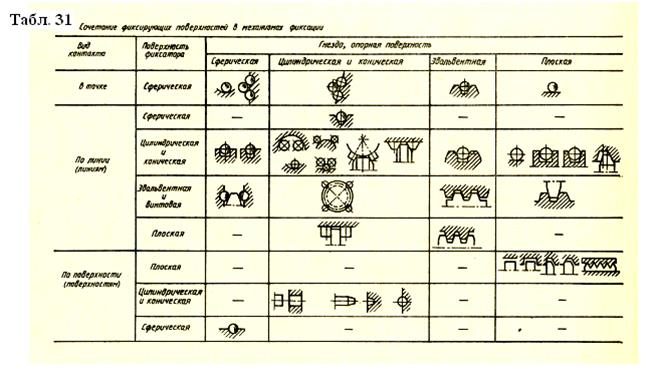
Табл. 32
Механизмы ввода и вывода фиксатора, создающие нагрузки, необходимые для точной установки узла и предотвращения расфиксации при работе станка, надежности вывода, разделяют по типу привода, наличию самоторможения, упругих звеньев (с силовым замыканием), направлению сил, действующих на фиксатор и его направляющие. Вывод фиксатора-упора часто осуществляется при повороте узла кулачками, закрепленными на нем.
В механизмах зажима (прижима) и освобождения опор фиксируемых узлов обращают внимание на правильное центрирование поворачиваемых узлов и предотвращение их смещения при зажиме относительно направляющих. Это во многом зависит и от типа механизма фиксации. При применении механизмов с муфтами (плоскими зубчатыми колесами 1, 2, рис,117; см. также табл.32, механизмы la—Зв} обеспечивается центрирование за счет формы фиксирующих поверхностей при одновременном усреднении ошибок деления. При повороте планшайбы 3 включается муфта 4. Для прижима планшайбы к направляющим 5 применяют механизмы с электромеханическим, гидравлическим и пневматическим приводом.

Выборка зазоров в направляющих фиксаторов, наиболее просто осуществляется в призматических направляющих с помощью периодически регулируемого клина или путем его автоматизированного перемещения после окончания фиксации. Применяют также зажим с помощью эксцентрика. Из числа разрезных фиксаторов хорошо зарекомендовал себя цилиндрический фиксатор, применяющийся для фиксации кольцевых столов. Недостатком его является сложность пригонки фиксирующих поверхностей при сборке механизма. При упругих фиксаторах, применяемых в механизмах с усреднением ошибок деления, направляющие отсутствуют и выборка зазоров не требуется. За счет упругости фиксаторов выбираются зазоры между фиксирующими поверхностями фиксатора и роликов. При такой конструкции необходим надежный прижим планшайбы к направляющим.
Уменьшение изнашивания фиксирующих и направляющих поверхностей основных фиксаторов обеспечивается за счет устранения скольжения фиксирующих поверхностей упора и фиксатора и уменьшения нагрузок на направляющие поверхности. В механизмах двойной фиксации, в которых фиксируемый узел реверсируется и прижимается к основному фиксатору, фиксатор при повороте узла свободно вводится в фиксирующее гнездо или в заданную позицию. Реверс производится либо приводом поворота (см. табл.32, механизмы 7а, 76, 7д, 8а), либо вторым фиксатором (механизмы 7в, 7ж, 7з, 86). В механизмах с вращающимися фиксаторами (типа 1в, 2а, 26) разгрузка направляющих и фиксирующих поверхностей цевок (с предварительным натягом) невозможна.
В механизме многошпиндельного токарного автомата применена сложная рычажная система, которая с помощью кулачка, закрепленного на распределительном валу, и пружин осуществляет ввод основного и натяжного фиксаторов. При этом во время фиксации основной фиксатор неподвижен. Натяжной фиксатор совершает сложное движение, что обеспечивает плавность западания в гнездо и реверса шпиндельного блока.
Технологические особенности изготовления и доводки механизмов фиксации: наиболее простые в изготовлении цилиндрические фиксаторы (см. табл.32, механизмы 5а, 56, 5в) притирают. При этом добиваются (при диаметрах фиксатора 30—40 мм) зазора 8—12 мкм. Отверстия под фиксирующие втулки растачивают на координатно-расточном станке.
В механизмах типа 4а, 46 гнезда часто выполняют в сухарях, положение которых на планшайбе можно регулировать с помощью винтов или клиньев и прокладок, после чего их привертывают и штифтуют. Плоские и цилиндрические фиксирующие поверхности притирают. У механизма типа 4г пришлифовывают и притирают плоские фиксирующие поверхности пальцев, запрессованных в шпиндельный блок.
Дата добавления: 2016-02-04; просмотров: 8803;