Показатели, определяющие кинематическую точность зубчатого колеса
Все показатели для контроля зубчатых колес делятся на:
- дифференцированные
- комплексные.
Дифференцированные показатели характеризуют только отдельные погрешности изготовления зубчатых колёс. Используются для контроля зубчатых колёс 5 …8 степени точности. При этом по отдельности не используются, а используются попарно.
Комплексные– наиболее полно отражают точность колёс и применяются для контроля колёс 3 … 5 степени.
Комплексные показатели кинематической точности
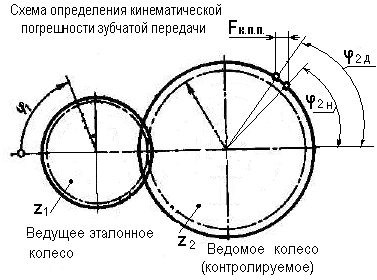 1.Кинематическая погрешность передачи Fк.п.п. – разность действительного и номинального (расчетного) углов поворота ведомого зубчатого колеса. Измеряется по дуге делительной окружности в линейных единицах, мм.
1.Кинематическая погрешность передачи Fк.п.п. – разность действительного и номинального (расчетного) углов поворота ведомого зубчатого колеса. Измеряется по дуге делительной окружности в линейных единицах, мм.
Fк.п.п.=(φ2д - φ2н) ∙r,
r – радиус делительной окружности ведомого колеса.
φ2н = φ1д ∙ z1/z2,
φ1д – действительный угол поворота ведущего колеса.
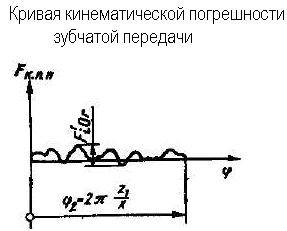 2.Наибольшая кинематическая погрешность передачи Fіоr – алгебраическая разность значений кинематической погрешности за полный цикл относительного отклонения зубчатых колес.
2.Наибольшая кинематическая погрешность передачи Fіоr – алгебраическая разность значений кинематической погрешности за полный цикл относительного отклонения зубчатых колес.
Ограничивается допуском Fі = F′і 1 + F′і 2 – допуски кинематической погрешности колёс передачи.
Полный цикл (в пределах числа оборотов большего колеса):
 φ = 2π ∙ z1/х,
φ = 2π ∙ z1/х,
z1 – число зубьев меньшего колеса.
х – наибольший общий делитель числа зубьев колёс.
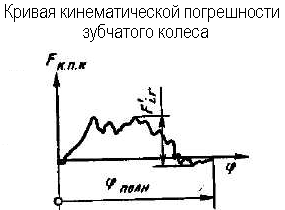
4.Наибольшая кинематическая погрешность колесаF′іr – наибольшая алгебраическая разность значений кинематической погрешности в пределах 1 оборота колеса
Кинематическая погрешность измеряется кинематомером.
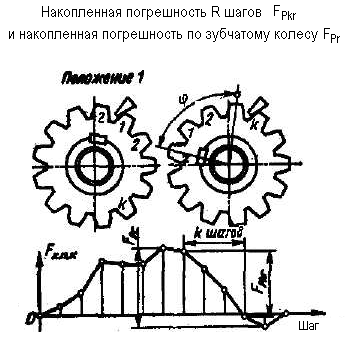
1) Накопленная погрешность шагаFрr – наибольшая разность накопленных шагов за 1 поворот колеса.
Под накопленной погрешностью понимают разность действительных и номинальных значений установленного числа шагов.
2) Накопленная погрешность «к» шагов Fрkr – наибольшее значение накопленной погрешности при повороте колеса на оборот.
Fрkr = (φ - φн)∙r
φ – действительный угол поворота колеса, соответствующий к-шагам.
φн = k 2π/z – номинальный угол поворота соответствующий к-шагам.
Fрr и F hkr – контролируется специальными приборами.
Дифференцированные показатели кинематической точности зубчатых колёс
1. Колебание длины общей нормали Fvwr – разность наибольшего и наименьшего значений длины общей нормали в пределах зубчатого колеса.
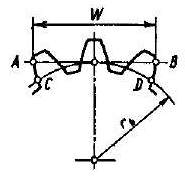 Fvwr = Wmax - Wmin
Fvwr = Wmax - Wmin
W – длина общей нормали – это расстояние между двумя параллельными плоскостями, проведенными касательно к боковым поверхностям зубьев.
Количество зубьев, входящую в общую нормаль (при измерении) определяется:
n = z + 0,5/9
Эта погрешность ограничивается допуском Fvw и измеряется нормалемером.
2. Погрешность обката Fcr – часть кинематической погрешности колеса, которая формируется в процессе зубообработки за счет кинематической погрешности делительных цепей станка, которая полностью передаётся на зубчатый венец.
Погрешность обката измеряется на его технологической оси за вычетом циклических погрешностей зубцовой частоты.
Технологическая ось колеса – ось, вокруг которой оно вращается в процессе обработки зубьев.
Погрешность обката ограничивается допуском Fc.. Кинематомер.
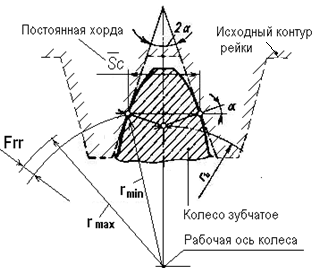
3. Радиальное биение зубчатого венца Frr – разность наибольшего и наименьшего расстояний в пределах зубчатого колеса от рабочей оси колеса до постоянной хорды (делительной прямой) исходного контура, условно наложенного на профиль зуба колеса.
- ограничивается допуском Fr
- измеряется на биениемере.
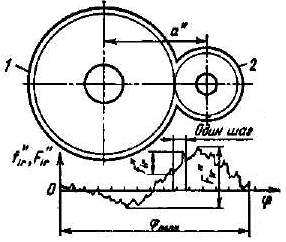 4.Колебание измерительного межосевого расстояния за 1 оборот колесаFіr" – разность наибольшего и наименьшего значений межосевого расстояния за 1 оборот колеса при беззазорном двухпрофильном зацеплении его с измерительным (эталонным колесом – на 2, 3 степени точнее) и имеющих наименьшее смещение исходного контура.
4.Колебание измерительного межосевого расстояния за 1 оборот колесаFіr" – разность наибольшего и наименьшего значений межосевого расстояния за 1 оборот колеса при беззазорном двухпрофильном зацеплении его с измерительным (эталонным колесом – на 2, 3 степени точнее) и имеющих наименьшее смещение исходного контура.
z1 – измеряемое колесо
z2 – эталонное
Прибор – межцентрометр.
Ограничивается допуском Fі"
Дата добавления: 2016-02-02; просмотров: 1453;