Статическая определимость кинематической цепи
При силовом анализе механизмов (определении неизвестных сил, действующих на движущиеся звенья) можно использовать уравнения (законы) статики. Докажем это положение, проанализировав реакции в кинематических парах (табл.).
| Кинематические пары | Равновесие каждого звена | Известные параметры | Неизвестные параметры |
5-й класс
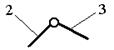 Вращательная
Вращательная
| 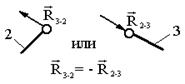
| Точка приложения | Величина, направление |
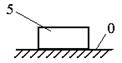 Поступательная
Поступательная
| 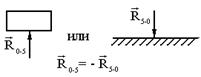
| Направление | Величина, точка приложения |
4-й класс
| 
| Точка приложения, направление | Величина |
Примечание. 2, 3, 5 – номера звеньев.
В кинематических парах 5-го класса известно по одному параметру сил реакций, неизвестны два, в кинематических парах 4-го класса известны два параметра, а неизвестен один.
Таким образом, плоская кинематическая цепь, состоящая из кинематических пар 5-го и 4-го классов, имеет 2Р5 + Р4 неизвестных величин сил реакций.
В то же время для одного звена можно составить 3 уравнения статики, а для nзвеньев – 3n уравнений статики.
Кинематическая цепь будет статически определима, если число неизвестных величин сил реакций не превышает числа возможных уравнений статики, т.е.
3n = 2P5 + Р4.
Это и есть условие статической определимости кинематической цепи.
Полученное равенство можно записать в виде
3n – 2Р5 – Р4 = 0.
Но запись слева от знака равенства является числом степеней свободы кинематической цепи W, т.е.
W = 3n – 2Р5 – P4 = 0.
Как известно (см. раздел 1 «Структура и классификация механизмов»), таким свойством (W=0) обладают структурные группы, или группы Асура – статически определимые кинематические цепи.
Метод силового анализа, приведенный ниже, называется кинетостатическим, так как для определения сил реакций в кинематических парах, возникающих при движении звеньев, используются уравнения статики.
Порядок (последовательность) силового анализа рычажного механизма:
1. Выделяем из механизма последнюю (крайнюю, наиболее удаленную от ведущего звена) структурную группу и проводим её силовой расчёт, используя уравнения статики.
2. Выделяем из механизма следующую структурную группу и проводим её силовой расчёт.
3. Силовой расчёт заканчиваем силовым расчётом ведущего звена.
Пример
Задан шестизвенный рычажный механизм (рис. 3.4), состоящий из начального механизма (звенья 0 и 1) и структурных групп, образованных звеньями 2 и 3 (двухповодковая структурная группа 2-го класса, 1-го вида) и 4, 5 (структурная группа 2-го класса, 2-го вида).
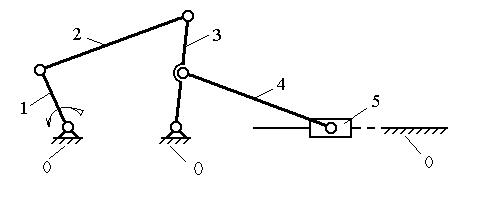
Рис. 3.4. Шестизвенный рычажный механизм
Решение
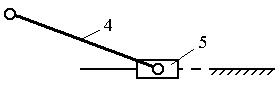
1. Проводим силовой расчёт структурной группы 4-5 (определяем неизвестные реакции, если известны внешние силы, действующие на звенья 4 и 5):
2. Проводим силовой расчёт структурной группы 2-3:

3. Проводим силовой расчёт ведущего звена:

Дата добавления: 2016-01-29; просмотров: 1690;