Б) Активное сопротивление обмотки якоря.
Активное сопротивление обмотки якоря rа больше ее сопротивления r постоянному току, что обусловлено вихревыми токами, которые наводятся полем рассеяния обмотки якоря. Увеличение rа по сравнению с r обычно составляет небольшую величину для современных больших машин, где главным образом и приходится с ним считаться. Для таких машин, например турбогенераторов, принимается ряд мер для уменьшения потерь, вызванных полем рассеяния. Наиболее эффективной мерой нужно считать выполнение обмотки статора из транспонированных стержней, т. е. из стержней, состоящих из некоторого числа элементарных проводников, особым образом скрученных друг с другом, вследствие чего э.д.с., наведенные в них пазовым полем рассеяния, практически равны между собой. Так как эти элементарные проводники изолированы друг относительно друга, то внутри стержней не возникает вихревых токов и ток распределяется практически равномерно по всем элементарным проводникам. Активное сопротивление обмотки якоря невелико, и обусловленное им активное падение напряжения составляет, например, для больших машин меньше 0,5% от номинального напряжения.
4-3.3. Диаграммы неявнополюсной машины
Векторные диаграммы для неявнополюсных машин были предложены А. Потье (A. Potier). Они аналогичны векторным диаграммам трансформатора. Для построения их при расчете машины необходимо иметь характеристику холостого хода, параметры обмотки статора rа и хσ, а также обмоточные данные статора и ротора.
За н.с. статора можно принять ее первую гармонику, имеющую амплитуду (см. § 3-4,6)
 , (4-3)
, (4-3)
и пренебречь при этом ее высшими гармониками. Поля, созданные последними, наводят в обмотке статора э.д.с. основной частоты и должны быть отнесены к полям рассеяния.
За н.с. ротора мы также примем ее первую гармонику, амплитуда которой определяется следующим образом. На рис. 4-14 изображена кривая н.с. ротора. Ее можно считать трапецеидальной, пренебрегая ступенчатостью в той ее части, которая соответствует зубцам и пазам ротора.
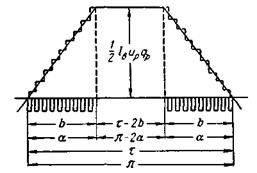
Рис. 4-14. Кривая н.с. обмотки возбуждения неявнополюсного ротора.
Амплитуда первой гармоники трапецеидальной кривой
 , (4-4)
, (4-4)
где Iв — ток в обмотке возбуждения;
up — число проводников в пазу ротора;
qp —число пазов на полюс;
 .
.
Высшими гармониками н.с. ротора можно пренебречь, так как при обычном
значении  гармоники с номером, кратным трем, почти равны нулю, а остальные незначительны. Вместо (4-4) напишем:
гармоники с номером, кратным трем, почти равны нулю, а остальные незначительны. Вместо (4-4) напишем:
 , (4-5)
, (4-5)
где wв = ирqрр — число витков обмотки в возбуждения, включенных последовательно.
Таким образом, получаем две синусоидально распределенные н.с. с амплитудами  и
и  . Они изобразятся пространственными векторами, сдвинутыми на
. Они изобразятся пространственными векторами, сдвинутыми на  эл. рад (рис. 4-13). Мы можем заменить их временными векторами н.с. и , пульсирующих по оси рассматриваемой фазы статора и сдвинутых по фазе (во времени) на угол .
эл. рад (рис. 4-13). Мы можем заменить их временными векторами н.с. и , пульсирующих по оси рассматриваемой фазы статора и сдвинутых по фазе (во времени) на угол .
Результирующую н.с., действующую в машине и определяющую поток в воздушном зазоре, сцепляющийся с фазой статора, найдем, сложив векторы и .
При расчете обычно требуется определить н.с. обмотки возбуждения при заданных (например, номинальных) значениях: тока I, напряжения U и cos φ. Эта задача разрешается при помощи диаграммы неявнополюсной машины, называемой также диаграммой Потье.
Соответствующие построения для генератора, работающего с отстающим током, приведены на рис. 4-15.
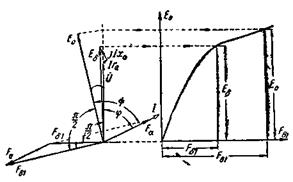
Рис. 4-15. Построение диаграммы неявнополюсного генератора, работающего с отстающим током.
Здесь слева построены вектор  и под заданным углом φ к нему вектор
и под заданным углом φ к нему вектор  . Затем к вектору U прибавлены векторы падений напряжения: активного
. Затем к вектору U прибавлены векторы падений напряжения: активного  и индуктивного от расстояния
и индуктивного от расстояния  . Таким путем найден вектор э.д.с.
. Таким путем найден вектор э.д.с.  , наведенной в рассматриваемой фазе статора потоком воздушного зазора
, наведенной в рассматриваемой фазе статора потоком воздушного зазора  . Поток создается результирующей н.с.
. Поток создается результирующей н.с.  ; по аналогии с трансформатором его можно назвать главным потоком машины. Для по характеристике холостого хода определяется н.с.
; по аналогии с трансформатором его можно назвать главным потоком машины. Для по характеристике холостого хода определяется н.с.  .
.
На диаграмме она должна быть нанесена в виде вектора опережающего вектор  на
на  . Зная сумму и одно из слагаемых этой суммы (вектор должен быть проведен в направлении вектора ), находим другое слагаемое , как. показано на рис. 4-15. На том же рисунке показано определение э.д.с. Е0, которая наводилась бы при холостом ходе генератора, и н.с. Fв1. Следовательно, при помощи диаграммы можно определить изменение напряжения генератора, под которым понимается повышение напряжения на его зажимах при переходе от режима номинальной нагрузки к режиму холостого хода при неизменных возбуждении и частоты вращения. Оно обычно выражается в процентах от номинального напряжения. Процентное изменение напряжения, таким образом, равно:
. Зная сумму и одно из слагаемых этой суммы (вектор должен быть проведен в направлении вектора ), находим другое слагаемое , как. показано на рис. 4-15. На том же рисунке показано определение э.д.с. Е0, которая наводилась бы при холостом ходе генератора, и н.с. Fв1. Следовательно, при помощи диаграммы можно определить изменение напряжения генератора, под которым понимается повышение напряжения на его зажимах при переходе от режима номинальной нагрузки к режиму холостого хода при неизменных возбуждении и частоты вращения. Оно обычно выражается в процентах от номинального напряжения. Процентное изменение напряжения, таким образом, равно:
 . (4-6)
. (4-6)
В такой же последовательности, как и для предыдущего случая, производится построение диаграммы неявнополюсного генератора, работающего с опережающим током (φ < 0) или с током, совпадающим по фазе с напряжением (φ = 0).
На рис. 4-16 представлена диаграмма генератора, работающего с опережающим током.
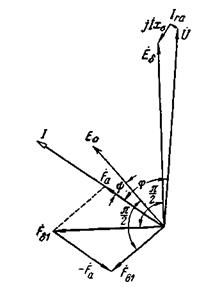
Рис. 4-16. Диаграмма неявнополюсного генератора, работающего с опережающим током.
Здесь также вначале строятся заданные векторы и , затем определяется э.д.с.  . Для
. Для  , по характеристике холостого хода отыскивается результирующая н.с. . Далее определяется н.с. обмотки возбуждения
, по характеристике холостого хода отыскивается результирующая н.с. . Далее определяется н.с. обмотки возбуждения  и для нее по характеристике холостого хода — э.д.с.
и для нее по характеристике холостого хода — э.д.с.  . На рис. 4-16 видно, что напряжение генератора при работе с опережающим током может получиться выше, чем при холостом ходе.
. На рис. 4-16 видно, что напряжение генератора при работе с опережающим током может получиться выше, чем при холостом ходе.
Если при построении векторной диаграммы вместо н.с. Fв1 взять пропорциональный ей ток возбуждения Iв, то весь треугольник векторов н.с. надо разделить на  , как это следует из (4-5). В этом случае вместо
, как это следует из (4-5). В этом случае вместо  на векторной диаграмме откладывается вектор
на векторной диаграмме откладывается вектор
 . (4-7)
. (4-7)
Можно также брать, как это обычно и делается, н.с. обмотки возбуждения на полюс  ; тогда вместо Fa надо взять:
; тогда вместо Fa надо взять:
 , (4-8)
, (4-8)
где
 (4-9)
(4-9)
может быть назван коэффициентом приведения н.с. обмотки якоря к н.с. обмотки возбуждения. Вместо Fδ1 в этом случае будем иметь:  .
.
Приведенные диаграммы дают результаты, достаточно точные для неявнополюсных машин, так как здесь можно принять, что кривая поля в воздушном зазоре при одной и той же амплитуде результирующей н.с. Fδ1 почти не зависит от положения этой амплитуды относительно оси полюсов ротора.
Для явнополюсных машин указанное допущение не может быть принято, так как здесь поле, созданное результирующей н.с., зависит от положения оси этой н.с. относительно оси полюсов. Поэтому для учета реакции якоря в явнополюсных машинах применяется другой метод — именно метод двух реакций, который был предложен А. Блонделем (A. Blondel). Диаграммы, построенные на основе этого метода, называются также диаграммами Блонделя.
4-3.4. Диаграммы явнополюсной машины
Метод двух реакций основан на разложении н.с. якоря на две н.с. — продольную и поперечную.
Продольная н.с. якоря
 ψ. (4-10)
ψ. (4-10)
Ось ее совпадает с осью н.с. обмотки возбуждения. При ψ > 0 н.с. Fd направлена против н.с. Fв обмотки возбуждения, при ψ < 0 Fd действует в ту же сторону, что и Fв (см. рис. 4-13).
Поперечная н.с. якоря
 ψ. (4-11)
ψ. (4-11)
Ее ось совпадает с серединой междуполюсного пространства (с поперечной осью ротора).
На рис. 4-17 изображены кривые н.с. якоря Fa и ее составляющих Fd и Fq для случая, когда ток I отстает от э.д.с. на угол ψ.
Рис. 4-17. Разложение н.с. якоря Fa на две составляющие — продольную Fd и поперечную Fq.
Допустим, что поле, созданное результирующей продольных н.с. Fв и Fd, не зависит от поля, созданного поперечной н.с. Fq . Такое допущение справедливо только для ненасыщенной машины, имеющей максимальные индукции в стальных участках магнитной цепи, не превышающие примерно 10000 Гс.
Для реальной машины, работающей с насыщенной магнитной цепью, раздельное рассмотрение продольного и поперечного полей не может быть теоретически обосновано. Однако с некоторым приближением и для насыщенной машины можно принять, что продольное и поперечное поля существуют независимо одно от другого, так как поперечное поле обычно в большой степени ослабляется из-за наличия междуполюсных промежутков.
Обратимся к рис. 4-18 и будем считать, что векторы представленной на этом рисунке диаграммы известны.
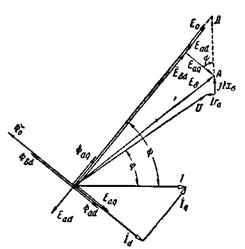
Рис. 4-18. Диаграмма явнополюсной машины.
Здесь: — э.д.с., которая наводилась бы потоком  , если бы в машине действовала только одна н.с. обмотки возбуждения;
, если бы в машине действовала только одна н.с. обмотки возбуждения;  —э.д.с., наведенная продольным потоком
—э.д.с., наведенная продольным потоком  в воздушном зазоре, созданным результирующей продольных н.с. машины; разность
в воздушном зазоре, созданным результирующей продольных н.с. машины; разность  можно условно считать за э.д.с., наведенную продольным потоком реакции якоря
можно условно считать за э.д.с., наведенную продольным потоком реакции якоря  ;
;  — поперечный поток реакции якоря, созданный н.с.
— поперечный поток реакции якоря, созданный н.с.  ;
;  — э.д.с. наведенная потоком
— э.д.с. наведенная потоком  .
.
Результирующую э.д.с.  можно рассматривать, как действительную э.д.с., наведенную в обмотке якоря результирующим потоком воздушного зазора. Напряжение
можно рассматривать, как действительную э.д.с., наведенную в обмотке якоря результирующим потоком воздушного зазора. Напряжение  находим обычным путем, вычитая из
находим обычным путем, вычитая из  индуктивное и активное падения напряжений.
индуктивное и активное падения напряжений.
Представленная на рис 4-18 диаграмма и есть диаграмма явнополюсной машины, основанная на теории двух реакций. Изображенные здесь векторы потоков определяются по первым гармоникам соответствующих магнитных полей.
Для построения векторной диаграммы явнополюсной машины нужно предварительно найти н.с. Fad и Faq обмотки возбуждения, эквивалентные по своему индуктирующему действию н.с. Fd и Fq обмотки якоря. Мы при этом считаем, что поля, созданные н.с. Fad и Faq обмотки возбуждения, имеют такие же первые гармоники, как и поля, созданные н.с. Fd и Fq и обмотки якоря. Следовательно, при определении Ead и Eaq, соответствующих Fad и Faq, мы можем пользоваться характеристикой холостого хода, построенной как зависимость э.д.с. Е0 от н.с. Fв = Iв  ( =
( =  — число витков обмотки возбуждения на один полюс).
— число витков обмотки возбуждения на один полюс).
Введем следующие обозначения:
 ; (4-12)
; (4-12)
 , (4-13)
, (4-13)
где kd и kq — коэффициенты приведения продольной и поперечной н.с. якоря к н.с. обмотки возбуждения.
Для определения kd и kq обратимся к кривым полей, созданных Fв, Fd и Fq. На рис 4-19,а представлены кривые поля Ввх = f(x), созданного н.с. Fв, и поля Bdx = f(x), созданного н.с. Fd. На рис. 4-19,б показана картина поля в воздушном зазоре, позволяющая построить указанные кривые (индукционные линии поля должны быть проведены таким образом, чтобы они были нормальны к поверхностям их входа в сталь и выхода из стали и представляли собой плавные кривые имея в виду симметрию полюса относительно его оси, можно было бы нанести картину поля только для одной его половины).
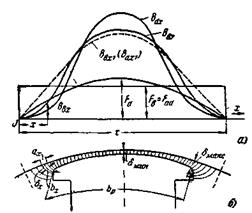
Рис. 4-19. Продольные поля (к определению kq).
Кривая поля созданного н.с. Fв, строятся следующим образом.
Сначала определяется поток индукционной трубки имеющей длину по оси машины, равную 1 см:
 . (4-14)
. (4-14)
Индукция в основании трубки
 , (4-15)
, (4-15)
где  — магнитная проводимость индукционной трубки, имеющей ширину и длину основания, равные 1 см.
— магнитная проводимость индукционной трубки, имеющей ширину и длину основания, равные 1 см.
Кривая  при другом масштабе может рассматриваться, следовательно, как кривая распределения проводимости воздушного зазора вдоль внутренней окружности статора: λx = f(x).
при другом масштабе может рассматриваться, следовательно, как кривая распределения проводимости воздушного зазора вдоль внутренней окружности статора: λx = f(x).
Мы будем считать, что форма кривой Bвх = f(x) не зависит от насыщения зубцов и ярма статора, что близко к действительным условиям, так как синхронные машины обычно имеют относительно большие воздушные зазоры.
Кривую поля Bdx = f(x), созданного продольной н.с. якоря, найдем по соотношению
 , (4-16)
, (4-16)
так как продольная н.с. якоря по его окружности распределена синусоидально.
Если бы нам удалось так подобрать Fd и Fв, чтобы амплитуды первых гармоник (пунктирная синусоида на рис 4 19,а) кривых Ввх = f(x) и Bdx = f(x) были равны, то Fd и Fв были бы эквивалентны по индуктирующему действию и  . Практически для определения kd можно построить кривые полей Ввх и Bdx при Fd = Fв. Тогда отношение амплитуд первых гармоник соответствующих кривых полей будет равно kd.
. Практически для определения kd можно построить кривые полей Ввх и Bdx при Fd = Fв. Тогда отношение амплитуд первых гармоник соответствующих кривых полей будет равно kd.
Кривая поля В = f(х), созданного поперечной н.с. якоря Fq, показана на рис. 4-20.
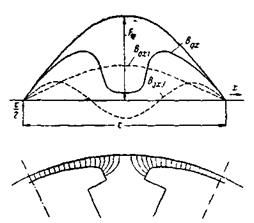
Рис. 4-20. Поперечное поле (к определению kq).
Она находится аналогичным образом по картине поля. Если взять Fq = Fв, то отношение амплитуд первых гармоник кривой Вax = f(x) и кривой Bвx = f(x) (рис. 4-19,а) будет равно kq.
На рис. 4-21 и 4-22 приведены значения kd и kq в зависимости от коэффициента полюсного перекрытия  для различных отношений
для различных отношений  при равномерном воздушном зазоре и при
при равномерном воздушном зазоре и при  =1,5 (размеры bр, δмин, δмакс, τ указаны на рис. 4-19).
=1,5 (размеры bр, δмин, δмакс, τ указаны на рис. 4-19).
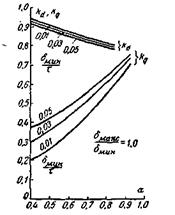
Рис. 4-21. Кривые kd = f(α) и kq = f(α.) для различных значений при равномерном воздушном зазоре.

Рис. 4-22. Кривые kd = f(α) и kq = f(α.) для различных значений при .
Для машин примерно до 100 кВА часто берут равномерный зазор, для машин большей мощности обычно =1,5.
На рис. 4-20 видно, что кривая поперечного поля сильно искажается. Особенно резко в ней проявляется третья гармоника Bqx3. В кривой фазной э.д.с. мы будет также иметь третью гармонику. Она будет тем больше, чем больше Fq, т. е. будет увеличиваться при увеличении активного тока Icos ψ.
В кривой междуфазного напряжения (при соединения обмотки статора в звезду) все гармоники с номером, кратны трем, пропадают, так как они при обходе контура, состоящего из двух фаз, направлены в противоположные стороны. В кривой фазного напряжения они будут иметь место. Это обстоятельство иногда приходится иметь в виду при использовании нулевой точки обмотки статора.
В линейном напряжении при соединении обмотки статора в треугольник также не будет третьих гармоник, так как для них обмотка будет замкнута накоротко. Однако в этом случае по треугольнику будет циркулировать ток, созданный третьими гармониками фазных э.д.с., поэтому обмотку статора явнополюсной машины, как правило, соединяют в звезду.
Покажем теперь, как производится построение диаграммы явнополюсной машины по расчетным данным для определения н.с. обмотки возбуждения и изменения напряжения. При построении диаграммы будет показано, как определяется угол ψ, который необходим для вычисления Fad и Faq. Обычно считают, что амплитуда первой гармоники поперечного поля реакции якоря пропорциональна н.с. Faq, так как проводимость индукционных трубок этого поля определяется главным образом проводимостью воздушных промежутков. Поэтому для определения Eaq можно воспользоваться прямолинейной частью характеристики холостого хода или в случае необходимости ее продолжением.
На рис. 4-23 показано построение диаграммы явнополюсного генератора, работающего с отстающим током.
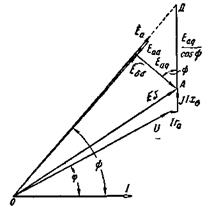
Рис. 4-23. Построение диаграммы явнополюсного генератора, работающего с отстающим током.
Сначала должны быть построены векторы тока  и напряжения , значения которых, так же как и угла φ, заданы. Затем к напряжению прибавляем падения напряжения
и напряжения , значения которых, так же как и угла φ, заданы. Затем к напряжению прибавляем падения напряжения  и
и  . Далее на продолжении вектора откладываем отрезок
. Далее на продолжении вектора откладываем отрезок  , равный
, равный  . Величину находим по характеристике холостого хода для н.с.
. Величину находим по характеристике холостого хода для н.с.  (рис. 4-24).
(рис. 4-24).
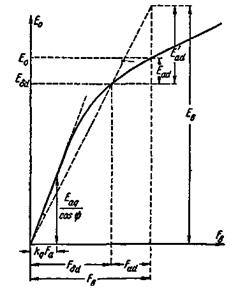
Рис. 4-24. Характеристика холостого хода. (к построению диаграммы явнополюсного генератора).
Таким образом, для определения точки D значение угла ψ не является необходимым. На линии, проведенной через точки 0 и D, будут находиться векторы продольных э.д.с.  ,
, 
 (ср. с рис. 4-18). Перпендикуляр, опущенный из точки А на эту линию, равен, очевидно, э.д.с. . Из приведенного построения теперь можно найти угол ψ.
(ср. с рис. 4-18). Перпендикуляр, опущенный из точки А на эту линию, равен, очевидно, э.д.с. . Из приведенного построения теперь можно найти угол ψ.
Зная угол ψ, найдем Fad = kdFa sin ψ. Для определения Е0 и Ead нужно обратиться снова к характеристике холостого хода (рис. 4-24). Из нее по найденному значению результирующей продольных э.д.с Е0 и Ead, т. е. по значению , находим результирующую н.с. Fδd. Искомая н.с. обмотки возбуждения
 , (4-17)
, (4-17)
так как при ψ > 0 Fad действует против Fв. На рис. 4-24 показано также определение э.д.с. Е0 и Еad.
Как указывалось, приближенно считают, что продольное и поперечное поля существуют независимо одно от другого В этом случае насыщение стальных участков по продольной оси, если пренебречь полями рассеяния якоря и полюсов, определяется потоком Фδd, соответствующим э.д.с. Eδd. По предложению проф. А.И. Вольдека можно в векторные диаграммы ввести потоки  и
и  , созданные н.с.
, созданные н.с.  и
и  при данном насыщении магнитной цепи. Тогда можно применить принцип наложения и складывать потоки и
при данном насыщении магнитной цепи. Тогда можно применить принцип наложения и складывать потоки и  и наведенные ими э.д.с и
и наведенные ими э.д.с и  , которые на диаграммах должны заменить э.д.с. и . На рис. 4-24 показано, как определяются и при данном насыщении машины по продольной оси, которое соответствует э.д.с. Eδd. Таким образом, э.д.с. и на векторных диаграммах не соответствуют насыщению машины по продольной оси при данном режиме ее работы, а представляют собой некоторые условные величины.
, которые на диаграммах должны заменить э.д.с. и . На рис. 4-24 показано, как определяются и при данном насыщении машины по продольной оси, которое соответствует э.д.с. Eδd. Таким образом, э.д.с. и на векторных диаграммах не соответствуют насыщению машины по продольной оси при данном режиме ее работы, а представляют собой некоторые условные величины.
На рис. 4-25 приведено построение диаграммы явнополюсного генератора, работающего с опережающим током (в этом случае Fв = Fδd - Fad). Оно понятно без пояснений. Из диаграммы следует, что напряжение на зажимах генератора при его работе с опережающим током может быть выше, чем при холостом ходе.
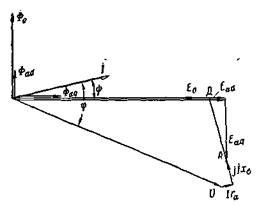
Рис. 4-25. Построение диаграммы явнополюсного генератора, работающего с опережающим током.
Рассмотренные диаграммы явнополюсной машины являются приближенными, так как в действительности поле в воздушном зазоре, созданное результирующей н.с. машины, будет отличаться от поля, полученного в результате сложения продольного и поперечного полей. Взаимное влияние этих полей приводит к изменению насыщения магнитной цепи и к искажению кривой результирующего поля, следовательно, к изменению амплитуды ее первой гармоники.
Для определения н.с. обмотки возбуждения явнополюсного генератора, соответствующей заданной нагрузке, при практических расчетах на заводах пользуются диаграммой неявнополюсного генератора. В этом случае нужно вместо  взять kdFa и обратиться к характеристике холостого хода E0 = f(Fв) (на оси абсцисс Fв, а не Fв1). При этом получаются, как показывает опыт, практически приемлемые результаты при cos φ
взять kdFa и обратиться к характеристике холостого хода E0 = f(Fв) (на оси абсцисс Fв, а не Fв1). При этом получаются, как показывает опыт, практически приемлемые результаты при cos φ  0,8.
0,8.
4-3.5. Упрощенные диаграммы
Рассматриваемые здесь упрощенные диаграммы являются одними из первых диаграмм, которые начали применять при исследовании синхронных машин. В настоящее время они служат главным образом для качественного рассмотрения явлений в этих машинах. Количественный учет при их помощи получается обычно недостаточно точным. Только для машин неявнополюсных и ненасыщенных, следовательно, имеющих прямолинейную характеристику холостого хода, они могут дать точные результаты.
Если для ненасыщенной неявнополюсной машины построить векторную диаграмму по методу, изложенному в п. «г», то она будет иметь вид, представленный на рис. 4-26.
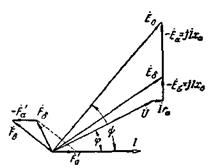
Рис. 4-26. Диаграмма ненасыщенной неявнополюсной машины.
На этом рисунке видно, что продолжение вектора попадает как раз в конец вектора . Для рассматриваемой ненасыщенной машины можно считать,
что поле реакции якоря, так же как и поле рассеяния, существует независимо от поля, создаваемого обмоткой возбуждения, и что поток реакции якоря в воздушном зазоре пропорционален н.с. якоря Fa. Следовательно, наведенная им э.д.с. Ea также пропорциональна н.с. Fa.
При полученных соотношениях нет необходимости раздельно рассматривать поле рассеяния и поле реакции якоря. Можно взять полное потокосцепление поля якоря с его обмоткой и рассматривать только одну наведенную им э.д.c., которая, очевидно, будет равна:
 . (4-18)
. (4-18)
Сопротивление
 , (4-19)
, (4-19)
называется синхронным индуктивным сопротивлением. Для ненасыщенной машины оно представляет собой постоянную величину.
При этих условиях диаграмма, данная на рис. 4-26, превращается в упрощенную диаграмму, представленную на рис. 4-27.
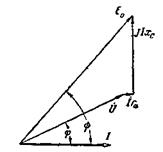
Рис. 4-27. Упрощенная диаграмма синхронной машины.
В соответствии с диаграммой на рис 4-27 можно начертить схему замещения, в виде представленной на рис. 4-28.
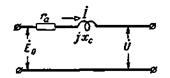
Рис. 4-28. Упрощенная схема замещения синхронной машины.
В дальнейшем упрощенную диаграмму будем использовать главным образом для качественного рассмотрения процессов в синхронной машине В этом случае она позволяет наглядно и просто разрешать многие вопросы.
4-3.6. Синхронные индуктивные сопротивления по продольной и поперечной осям машины
Обратимся к диаграмме явнополюсного генератора, имеющего ненасыщенную магнитную цепь (рис. 4-29)
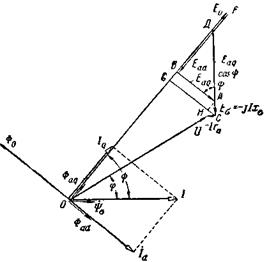
Рис. 4-29. Диаграмма ненасыщенного явнополюсного генератора.
Его характеристика холостого хода в этом случае представляет собой прямую линию. Для такой машины мы можем применить метод наложения, т. е. считать, что в воздушном зазоре существуют независимо один от другого поток полюсов  и потоки реакции якоря — продольный и поперечный . Тогда можно индуктирующее действие каждого из этих потоков рассматривать отдельно, как это обычно делают в отношении потокосцепления
и потоки реакции якоря — продольный и поперечный . Тогда можно индуктирующее действие каждого из этих потоков рассматривать отдельно, как это обычно делают в отношении потокосцепления  .
.
Поток , созданный н.с. обмотки возбуждения, наводит в обмотке якоря э.д.с. . Потоки и наводят в обмотке якоря э.д.с. и .
При принятых допущениях имеем:
 ,
,
следовательно, можем написать
 , (4-20)
, (4-20)
где хad — индуктивное сопротивление, обусловленное продольным потоком реакции якоря.
Ток
 (4-21)
(4-21)
называют "продольным" током синхронной машины.
Аналогично можем написать:

или
 , (4-22)
, (4-22)
где хaq —индуктивное сопротивление, обусловленное поперечным потоком реакции якоря;
 (4-23)
(4-23)
— "поперечный" ток синхронной машины.
Имея в виду, что  , можем согласно рис. 4-29 и приведенным соотношениям написать:
, можем согласно рис. 4-29 и приведенным соотношениям написать:
 ;
;

и
 .
.
Сопротивление
 (4-24)
(4-24)
называется синхронным индуктивным сопротивлением по продольной оси, а сопротивление
 (4-25)
(4-25)
синхронным индуктивным сопротивлением по поперечной оси.
После замены в диаграмме на рис. 4-29 э.д.с. соответствующими индуктивными падениями напряжения она получает вид, представленный на рис. 4-30.
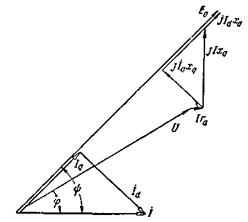
Рис. 4-30. Видоизмененная диаграмма ненасыщенного явнополюсного генератора.
Полученную диаграмму условно называют видоизмененной. При ее построении предполагалось, что машина ненасыщенна; поэтому использовались так называемые ненасыщенные значения параметров xd и xq. В действительности при нормальных условиях работы машины стальные участки ее магнитной цепи будут насыщенными, вследствие чего xd и xq будут меньше их ненасыщенных значений.
Индуктивное сопротивление xq приближенно считают постоянной величиной, не зависящей от насыщения.
Величину хad можно определить по значению э.д.с. Ead, условно учитывающему насыщение по продольной оси, или по значению э.д.с.  , приближенно соответствующему действительному насыщению по продольной оси (см рис 4-24). Очевидно, что индуктивное сопротивление хd не может считаться постоянной величиной — оно будет изменяться с насыщением машины.
, приближенно соответствующему действительному насыщению по продольной оси (см рис 4-24). Очевидно, что индуктивное сопротивление хd не может считаться постоянной величиной — оно будет изменяться с насыщением машины.
Как отмечалось, в основу метода двух реакций положено допущение независимости друг от друга продольного и поперечного магнитных полей машины. Это позволяет процессы в машине рассматривать отдельно по ее продольной и поперечной осям.
Чтобы лучше уяснить физическое значение параметров xd и xq, представим себе следующие опыты, проведенные с синхронной машиной. Пусть ротор машины с разомкнутой обмоткой возбуждения приводится во вращение с синхронной частотой посторонним двигателем. При этом к статору подведен трехфазный ток, создающий н.с., вращающуюся с синхронной частотой в направлении вращения ротора. Допустим, что при опыте удалось установить ось вращающейся н.с. статора так, чтобы она совпадала с осью полюсов, т. е. с продольной осью машины. Тогда распределение поля, созданного н.с. статора (в данном случае продольной), получится таким, как показано на рис 4-31,а.
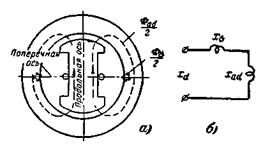
Рис. 4-31. Продольное поле реакции якоря и поле рассеяния (а). Схема замещения по продольной оси (б).
На рис. 4-31,а видим, что поток, сцепленный с фазой статора, состоит из потока Фad и потока Фσ. В соответствии с этим индуктивное сопротивление обмотки статора будет равно xd = xad + xσ, а наведенная в обмотке статора потоками Фσ и Фad э.д.с. равна Ead + Eσ.
Следовательно, измеряя при этом опыте напряжение, ток и мощность, можно было бы определить хd, так же как при опыте холостого хода трансформатора определяется x1 + x12. В соответствии с изложенным для продольной оси машины можно начертить схему замещения, изображенную на рис. 4-31,б.
Аналогичным образом можно было бы определить xq. Действительно, представим себе, что при опыте удалось установить ось вращающейся н.с. статора так, что она совпадает с поперечной осью машины. Ротор при этом вращается в ту же сторону и с такой же частотой, что и н.с. Тогда получим распределение поля, схематически показанное на рис. 4-32,а.
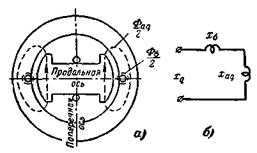
Рис. 4-32. Поперечное поле реакции якоря и поле рассеяния (а). Схема замещения по поперечной оси (б).
В этом случае по данным измерений тока, напряжения и мощности можно было бы найти  . Схему замещения для поперечной оси машины можно начертить, как показано на рис. 4-32,б.
. Схему замещения для поперечной оси машины можно начертить, как показано на рис. 4-32,б.
Проведение указанных опытов связано, однако, с большими практическими затруднениями; поэтому для определения ха, и xq применяются другие методы, в частности, так называемый метод скольжения, который заключается в следующем.
Ротор с разомкнутой обмоткой возбуждения приводится во вращение в сторону вращения поля статора со частотой, несколько меньшей (или большей), чем частота поля. Статор в это время получает трехфазный ток от постороннего источника. Ось полюсов будет перемещаться относительно оси н.с. статора со частотой скольжения, которое должно быть установлено по возможности небольшим. При совпадении оси н.с. статора с продольной осью машины индуктивное сопротивление обмотки статора будет наибольшим, равным xd. При совпадении оси н.с. статора с поперечной осью машины индуктивное сопротивление обмотки статора будет наименьшим, равным xq. Соответственно изменению индуктивного сопротивления обмотки статора получим медленные колебания стрелок амперметра и вольтметра, показанных в схеме опыта на рис. 4-33.
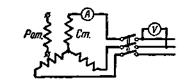
Рис. 4-33. Схема опыта для определения xd и хq по методу скольжения
Определяя при опыте  и
и  , где U и I — показания вольтметра и амперметра, получим:
, где U и I — показания вольтметра и амперметра, получим:

и
 .
.
Активным сопротивлением ввиду его малости по сравнению с хd и хq пренебрегаем. Опыт надо проводить при небольших напряжении и токе, чтобы иметь ненасыщенную машину и, следовательно, ненасыщенные значения xd и xq.
Поле реакции якоря неявнополюсной машины практически не зависит от положения оси н.с. статора относительно оси полюсов, поэтому для неявнополюсных машин можно считать:
 . (4-26).
. (4-26).
Небольшое различие между хd и хq (обычно не выше 3  4%) таких машин обусловлено неравномерным распределением пазов и зубцов по окружности ротора.
4%) таких машин обусловлено неравномерным распределением пазов и зубцов по окружности ротора.
4-3.7. Применение системы относительных единиц в теории синхронных машин
Система относительных единиц или долевых значений в настоящее время широко применяется при всякого рода практических расчетах, связанных с исследованием синхронных машин. К ее основным преимуществам нужно отнести то, что она облегчает расчеты, так как здесь при вычислениях приходится иметь дело с величинами, близкими к единице, а также то, что результаты расчетов в системе относительных единиц для машин различных типов и различной мощности мало отличаются друг от друга и поэтому легко позволяют производить сравнение машин.
При этой системе величины, характеризующие режим работы машины, и ее параметры выражаются не в вольтах, амперах, киловольт-амперах, омах и т. д., а в долях соответствующих величин и параметров, принятых за единицу.
В качестве базисных величин, значения которых условно принимаются за единицу, обычно выбираются номинальные величины. Так, например, ток в относительных единицах равен  , напряжение —
, напряжение —  , мощность —
, мощность —  , вращающий момент —
, вращающий момент —  и т. д.
и т. д.
Для параметров машины, т. е. для ее активных и индуктивных сопротивлений, за единицу сопротивления принимается величина  ; поэтому, обозначая долевые значения параметров теми же буквами, но со звездочкой, получим для активного сопротивления
; поэтому, обозначая долевые значения параметров теми же буквами, но со звездочкой, получим для активного сопротивления  , для индуктивного сопротивления рассеяния
, для индуктивного сопротивления рассеяния  и т. д.
и т. д.
Если помножить долевые значения параметров на 100, то получаются их процентные значения:
Долевое значение индуктивного сопротивления реакции якоря по продольной оси машины может быть выражено следующим образом:
Так как для ненасыщенной машины

и в соответствии с прямолинейной характеристикой холостого хода

где с — коэффициент пропорциональности; Fd — магнитное напряжение воздушного зазора, то получим, [д. e.]:
 (4-27)
(4-27)
Если учесть формулы для н.с. m-фазной обмотки  , магнитного напряжения воздушного зазора
, магнитного напряжения воздушного зазора  , линейной нагрузки
, линейной нагрузки  [А/см], полюсного деления
[А/см], полюсного деления  , то соотношение (4-27) можно переписать в следующем виде:
, то соотношение (4-27) можно переписать в следующем виде:
 (4-28)
(4-28)
Соотношением (4-28) устанавливается зависимость  от геометрических размеров t и d и от электромагнитных нагрузок A и Bd.
от геометрических размеров t и d и от электромагнитных нагрузок A и Bd.
Для изменения обычно приходится изменять воздушный зазор d, так как остальные величины для нормальных машин могут быть изменены лишь в небольших пределах.
Аналогичным образом найдем выражение для индуктивного сопротивления реакции якоря по поперечной оси:
Учитывая, что Eaq = cFaq = ckqFacosj, получим, [д. е.]:
 (4-29)
(4-29)
Из (4-27) и (4-29) следует, [д. е.]:
 (4-30)
(4-30)
Долевые значения отдельных параметров, обычные для современных синхронных машин, приведены в следующей таблице:
Таблица 4-1
| Типы машин | Параметры | ||

| 
| 
| |
| Неявнополюсные машины (турбогенераторы) | |||
| Двухполюсные | 1,6 – 2 | 1,55 – 1,95 | 0,10 – 0,18 |
| Четырехполюсные | 1,4 | 1,37 | 0,14 |
| Явнополюсные машины | |||
| Генераторы и двигатели | 0,6 – 1,5 | 0,4 – 0,9 | 0,11 – 0,15 |
| Компенсаторы | 1,6 – 2,1 | 0,95 – 1,2 | 0,12 – 0,18 |
Из этой таблицы следует, что значение ха определяется в основном значением .
4-3.8. Характеристики и векторные диаграммы
При исследовании синхронных генераторов, так же как и при исследовании других электрических машин, обращаются к их характеристикам, т. е. к кривым, определяющим зависимости между величинами, характеризующими рабочие режимы машины.
Обычно синхронные генераторы работают с постоянной частотой вращения, что обусловлено необходимостью поддерживать постоянной частоту тока. Поэтому в дальнейшем мы будем рассматривать характеристики, которые получаются при постоянной частоте вращения.
Одной из важнейших характеристик является рассмотренная ранее характеристика холостого хода. Она влияет на форму почти всех других кривых синхронной машины, характеризующих ее работу при нагрузке.
Характеристики генератора могут быть сняты опытным путем. Их также можно построить по характеристике холостого хода и параметрам машины, полученным расчетным или опытным путем. Такое построение позволяет выявить влияние различных параметров машины на ее характеристики. Оно будет показано в дальнейшем. Одновременно с этим будут рассмотрены способы опытного определения параметров машины.
Дата добавления: 2016-01-29; просмотров: 3025;