Б) Индукционная нагрузочная характеристика.
Из нагрузочных характеристик, представляющих собой зависимости U = f(Iв) при I = const и cos φ = const, практическое значение имеет лишь нагрузочная характеристика при cosφ = 0. Будем ее называть индукционной нагрузочной характеристикой. Она может быть снята при использовании в качестве нагрузки другой синхронной машины, включенной на параллельную работу с испытуемой (см. § 4-7).
Если характеристика снимается опытным путем при нагрузке генератора на реактивную катушку, то cos φ, очевидно, нельзя установить равным нулю. Однако опыт показывает, что при снятии рассматриваемой характеристики достаточно установить cos φ  0,2. Поэтому при испытании генераторов небольшой мощности в качестве нагрузки иногда используются реактивные катушки с переменной индуктивностью, имеющие относительно небольшие потери.
0,2. Поэтому при испытании генераторов небольшой мощности в качестве нагрузки иногда используются реактивные катушки с переменной индуктивностью, имеющие относительно небольшие потери.
На рис. 4-37,а представлена индукционная нагрузочная характеристика.
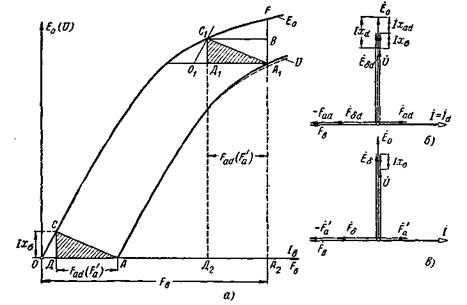
Рис. 4-37. Индукционная нагрузочная характеристика и определение сторон реактивного треугольника.
Ее точка А в соответствии с тем током, для которого она снималась, может быть взята из характеристики короткого замыкания (рис. 4-34). На рис. 4-37,а, кроме индукционной нагрузочной, изображена также характеристика холостого хода Е0. При помощи этих двух характеристик можно определить, как будет показано, сопротивление хσ и н.с. реакции якоря Fad (в случае явнополюсной машины) или  (в случае неявнополюсной машины).
(в случае неявнополюсной машины).
Покажем вначале, как может быть построена индукционная нагрузочная характеристика, если известны характеристика холостого хода и катеты реактивного треугольника, т. е. Iхσ и Fad или . Для этого нужно построить реактивный треугольник DСА в нижней части характеристики холостого хода (рис. 4-37,а) и передвигать его параллельно самому себе так, чтобы вершина С скользила по характеристике холостого хода; тогда вершина А опишет искомую характеристику. Для того чтобы убедиться, что точки полученной таким образом характеристики, действительно дают напряжения генератора при его работе с соsφ=0, рассмотрим построенные для этого случая диаграммы явнополюсной и неявнополюсной машин (рис. 4-37,б и в). Для диаграммы явнополюсной машины, если пренебречь активным сопротивлением обмотки статора, получим:
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
; 
(Id = I, так как  ; здесь xad, а следовательно, и xd — значения сопротивлений по продольной оси при условном учете насыщения ), для диаграммы неявнополюсной машины
; здесь xad, а следовательно, и xd — значения сопротивлений по продольной оси при условном учете насыщения ), для диаграммы неявнополюсной машины
;  ;
;  ;
;  ;
;
 ; .
; .
Теперь покажем, как по характеристикам холостого хода и индукционной нагрузочной, снятым опытным путем, определяются Ixσ и Fad или .
Из предыдущего следует, что если треугольник 0СА передвигать параллельно самому себе так, чтобы вершина А скользила по нагрузочной характеристике, то вершина С будет скользить по характеристике холостого хода. В верхней части характеристик этот треугольник займет положение 01С1A1 (рис. 4-37,а). Отсюда вытекает метод определения его сторон, т. е. сторон реактивного треугольника. Согласно этому методу проведем через точку A1 линию, параллельную оси абсцисс. На этой линии отложим отрезок  , равный отрезку
, равный отрезку  . Если теперь провести через точку 01 линию, параллельную начальной части характеристики холостого хода, то получим точку C1. Опустив из точки С1 перпендикуляр на линию 01A1, найдем искомый реактивный треугольник D1C1A1.
. Если теперь провести через точку 01 линию, параллельную начальной части характеристики холостого хода, то получим точку C1. Опустив из точки С1 перпендикуляр на линию 01A1, найдем искомый реактивный треугольник D1C1A1.
Приведенный метод определения сторон реактивного треугольника несколько неточен. В действительности нагрузочная характеристика, снятая опытным путем (пунктирная кривая на рис. 4-37,а), при больших насыщениях полюсов и ярма ротора пойдет несколько ниже, чем нагрузочная характеристика, построенная при помощи реактивного треугольника (сплошная кривая на рис. 4-37,а). Расхождение кривых объясняется тем, что при больших насыщениях полюсов и ярма ротора поток рассеяния обмотки возбуждения заметным образом повышает их магнитные напряжения, ничтожно малые при слабых насыщениях (например, при коротком замыкании). При нагрузке поток полюсов и ярма ротора слагается из потока, соответствующего э.д.с. Eδd (или Eδ), и потока рассеяния обмотки возбуждения, созданного н.с. Fв, а не н.с. Fδd (или Fδ), как это принимается при расчете характеристики холостого хода. Расхождение опытной и расчетной характеристик обычно невелико для нормальных машин; все же сопротивление, найденное по указанному методу, несколько отличается от сопротивления рассеяния хσ, поэтому его иногда называют индуктивным сопротивлением Потье и обозначают через хp.
Для неявнополюсных машин хp получается обычно близким к хσ. Для явнополюсных машин хp  (1,1
(1,1  1,3 хσ, если определение хp производится при напряжении
1,3 хσ, если определение хp производится при напряжении  (рис 4-37,а). Вообще же хp заметным образом зависит от выбора точки А1 на нагрузочной характеристике.
(рис 4-37,а). Вообще же хp заметным образом зависит от выбора точки А1 на нагрузочной характеристике.
Можно также приближенно найти стороны реактивного треугольника, если перенести (при помощи прозрачной бумаги) нагрузочную характеристику так, чтобы возможно большая нижняя часть ее совпала с характеристикой холостого хода. Тогда точка А должна попасть в точку С.
Дата добавления: 2016-01-29; просмотров: 2330;