Автоматические системы и регуляторы
Задача автоматического регулирования
Основной задачей автоматического регулирования является поддержание определенного закона изменения одной или нескольких физических величин в регулируемом (управляемом) объекте. В зависимости от структуры объекта различают задачи одноканального и многоканального управления.
Одноканальные задачи управления, к которым относятся задачи стабилизации, слежения и терминального управления, когда выходная переменная y(t) является скалярной функцией времени, устанавливают желаемый характер изменения переменных объекта управления.
Задача стабилизации или регулирования формулируется как задача поддержания выходной переменной на заданном уровне узад = const при t → ∞.
Задача слежения - это задача соблюдения заданного закона y*(t) изменения параметра у(t), то есть y(t) → у*(t), при t → ∞. Здесь различают:
- задачи слежения за внешним объектом, когда функция y*(t) является выходом внешнего объекта и заранее неизвестна;
- задачи программного управления, в которых программа движения y*(t) генерируется специальным задающим блоком (программатором), входящим в состав САУ.
Система автоматического управления, решающая задачу слежения, называется следящей системой. Сигнал y*(t), определяющий требуемый закон движения системы, называется задающим воздействием. Сигнал ∆y(t) = y*(t) – y(t), характеризующий текущее значение отклонения выходной переменной от задающего воздействия, называется рассогласованием, отклонением или ошибкой управления. Задачи стабилизации и слежения иначе могут быть сформулированы как задачи поддержания нулевого значения рассогласования, т. е. ∆y(t) → 0.
В многоканальных задачах управления выходом объекта служит векторная переменная (вектор выхода). Векторными переменными являются также задающие воздействие (вектор задания) и рассогласование (вектор ошибок). Формулировки основных задач многоканального управления практически не отличаются от одноканальных.
Математическое описание систем
И элементов автоматики
Описание систем и элементов автоматики в
Статическом режиме
Для создания автоматических систем необходимо иметь математическое описание (модель) процесса и математическую модель самой системы. За счет использования моделей во многом упрощаются решения поставленной задачи. Модель системы отображает определенные характеристики системы. При этом, наряду с аналитическими моделями используются и экспериментальные. Аналитические модели полнее отражают параметры объекта управления и системы, но и содержат ряд допущений и ограничений. Экспериментальные модели требуют минимальных сведений о процессах, но зачастую не удовлетворяют требованиям по точности инженерных расчетов.
По сути, математической моделью является совокупность уравнений и граничных условий, связывающих выходные и входные параметры САР и САУ, описывающих состояние этих систем в установившемся и переходном режимах.
Установившийся (статический) режим характеризуется состоянием, когда входные и выходные параметры системы постоянны во времени.
Для описания элементов и систем автоматики в статическом режиме используется статическая характеристика, выражающая зависимость выходной величины у элемента или системы от входной величины х в установившемся режиме, т. е. y = f(x). Эта зависимость является, как правило, нелинейной и ее не всегда удается аппроксимировать, т. е. описать аналитической функцией в целях дальнейшего анализа. В этих случаях используют ряд приемов и методов.
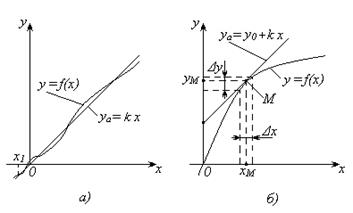
Метод осреднения, когда нелинейная характеристика – непрерывная функция на заданном участке ее изменения, заменяется некоторой, наиболее подходящей аналитической функцией, например, прямой линией (рис. 13.1, а).
|
| Рис. 13.1 – Методы аппроксимации статических характеристик: а) метод осреднения; б) метод малых отклонений |
Метод малых отклонений основан на замене нелинейной характеристики в окрестности рабочей точки М (xм , yм) прямой линией, касательной в этой точке (рис. 13.1, б). При этом рабочий диапазон элемента или системы Dx мал, а точка М находится в его середине. Аппроксимирующая функция в этом случае
уа = y0 + k x, где k = tgα, будет тем точнее отображать исходную зависимость y = f(x) в районе точки М, чем меньше участок Dx.
Метод выбранных точек основан на подборе аналитического выражения, например степенного многочлена, связывающего величины y и x при условии их совпадения в известных точках на статической характеристике: М0 (x0 , y0); М1 (x1 , y1) … Мn (xn , yn). При известных значениях координат точек (x0 … xn; y0 … yn), коэффициент многочлена находятся из системы уравнений:
y0 = а0 + а1х0 + …+ аnx0n;
y1 = а0 + а1х1 + …+ аnx1n;
…………………………………
yn = а0 + а1х n + …+ аnx n n.
Элементы и системы автоматики в статическом режиме характеризуются коэффициентом передачи, определяемым из статической характеристики, как
k=dy/dx.
Приближенно его определяют, как
К=Dy/Dx.
Для датчиков коэффициент К называют коэффициентом чувствительности, для усилителей – коэффициентом усиления.
Дата добавления: 2016-01-18; просмотров: 1393;