Программируемые логические контроллеры
Программируемый логический контроллер (ПЛК) представляет собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов подключенных к ним датчиков, и выходов для подключения исполнительных механизмов и связанных с объектом управления. Обычно ПЛК функционируют в режимах реального времени.
ПЛК призваны выполнять следующие функции:
- ввод и обработка аналоговой и цифровой информации;
- ввод и реализация алгоритмов переработки входной информации в управляющие сигналы для управления дискретным или непрерывным процессом;
- организация вывода управляющих сигналов;
- передача определенной информации в вычислительную сеть на персональный компьютер (ПК) или сервер;
- визуализация вводимой и выводимой информации (не обязательно).
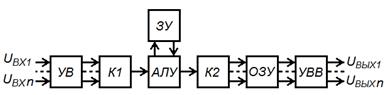
На рис. 12.1 приведена упрощенная функциональная схема ПЛК, поясняющая принцип действия данного устройства.
|
| Рис. 12.1 – Упрощенная функциональная схема ПЛК |
Основную часть схемы ПЛК образуют: запоминающее устройство ЗУ, в котором содержится программа его работы; арифметическое логическое устройство АЛУ, осуществляющее логические операции над последовательно вводимыми в него сигналами; коммутаторы входных К1 и выходных К2 сигналов; устройства ввода УВ и вывода УВВ входных (UBX1…UBXn) и выходных (UBЫX1…UBЫXn) сигналов; оперативное запоминающее устройство ОЗУ, в которое поступают результаты выполнения логических операций. Входные сигналы UBX1…UBXn, содержащие информацию о ходе технологического процесса, режимах работы отдельных частей управляемого объекта, состоянии защиты и т.д., поступают на входы УВ, которое обеспечивает их гальваническую развязку и формирование из них сигналов, соответствующих величине и виду используемых в данном ПЛК. Сформированные таким образом сигналы поступают на вход коммутатора К1, который последовательно подает на АЛУ тот из них, адрес которого содержится в очередной команде, поступающей из ЗУ. Выходные сигналы UBЫX1…UBЫXn формируются в УВВ и выступают в качестве управляющих в процессе управления и регулирования ходом технологического процесса.
Принцип работы ПЛК несколько отличается от других микропроцессорных устройств. Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть – это системное программное обеспечение. Проводя аналогию с компьютером, можно сказать, что это операционная система, управляющая работой узлов контроллера, устанавливает взаимосвязи составляющих частей и управляет внутренней диагностикой. Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора и всегда готово к работе. Вторая часть – это прикладное программное обеспечение, . которое вводится оператором.
ПЛК работают циклически по методу периодического опроса входных данных. Рабочий цикл ПЛК включает 4 фазы: опрос входов; выполнение пользовательской программы; установку значений выходов; некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и другие.).
Выполнение первой фазы обеспечивается системным программным обеспечением. После чего управление передается прикладной (пользовательской) программе. По этой программе ПЛК выполняет те операции, которые в ней предусмотрены. По ее завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы: ее создатель не обязан знать, как производится управление аппаратными ресурсами. Необходимо знать, с какого входа приходит сигнал и как на него реагировать на выходах.
Обладая памятью, ПЛК, в зависимости от предыстории событий, способен реагировать по-разному на текущие события. Возможности перепрограммирования, управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень в отличие от простых комбинационных автоматов.
Виды ПЛК
ПЛК классифицируют по ряду признаков: функциональным; конструктивным; объему вычислительных ресурсов; числу каналов ввода-вывода и др. С учетом этих признаков все ПЛК можно разделять следующим образом:
- моноблочные (компактные);
- модульные;
- РС-совместимые;
- встраиваемые контроллеры.
Это деление весьма условно, так как моноблочные и модульные ПЛК могут быть РС-совместимыми. РС-совместимые контроллеры могут иметь, в свою очередь, моноблочную или модульную конфигурацию. Однако при проектировании АСУТП выбор ПЛК осуществляется чаще всего по этой классификации.
Моноблочный контроллер представляет собой микропроцессорное устройство, в конструкции которого располагаются:
- источник питания;
- центральный процессор;
- память программ и переменных;
- встроенные порты для соединения цифровой вычислительной сетью;
- фиксированное число встроенных каналов аналогового и/или дискретного ввода/вывода;
- встроенный регулятор с автонастройкой (не обязательно);
- слот расширения (щелевой разъём) для подключения дополнительных модулей, расширяющих конфигурацию устройства;
- жидкокристаллический дисплей (не обязательно).
Увеличение вычислительной мощности моноблочных контроллеров достигается с помощью блоков расширения, объединенных цифровыми линиями связи.
Модульный ПЛК выполняется в виде совокупности модулей, установленных в едином каркасе (шасси, корзине), в которую входят:
- модуль питания;
- процессорный модуль;
- модуль ввода/вывода;
- коммуникационные и специальные модули.
Число модулей в корзине может доходить до 16 (и более). Количество модулей может быть увеличено за счет плат расширения и добавления новых корзин.
РС – совместимые контроллеры характеризуются:
- наличие встроенной РС – совместимой операционной системы (ОС): Windows 9X/2000/NT/XP/CE, QNX, MS DOS, Linux, Mini OS7, OS-9 и др.;
- возможностью использования стандартного программного обеспечения: Си, Турбо-Си, Си++, Паскаль, Assembler? SCADA - систем;
- коммуникационных стандартов (OPC, Active X, HTML, IEC);
- наличием OPC – сервера (OPC – OLE for Process Control);
- средств диагностирования.
OPC-сервер - это программа, работающая с протоколом OPC, представляющим собой семейство программных технологий, как единый интерфейс для управления объектами автоматизации и технологическими процессами.
Достоинство РС-совместимых контроллеров состоит в широком программном обеспечении. Они имеют значительно больший объем памяти, чем моноблочные ПЛК; обладают возможностью расширения и модернизации.
Однако эти контроллеры часто имеют избыточность вычислительных ресурсов, возможность зависания с длительным временем рестарта, пониженную надежность. Эти недостатки РС-совместимых контроллеров на практике преодолеваются контрмерами, снижающими или полностью устраняющими их.
Встраиваемые ПЛК представляют собой полнофункциональные системы, устанавливаемые в слот компьютера или объединительной платы. Они используют внешнее питание, имеют малые габариты, легкость замены. Новым направлением встраиваемых контроллеров является применение так называемых SOM- модулей, представляющих собой компактные интегрированные компьютеры, устанавливаемые на базовую плату.
Следует отметить, что ПЛК:
- по сетевым возможностям приближаются к промышленным компьютерам;
- имеют высокое быстродействие (0,9 мкс и менее на базовую команду);
- отличаются малыми габаритами и повышенной надежностью;
- отличаются возможностью быстрого резервирования - «горячей замены модулей»;
- характеризуется наличием сторожевого таймера;
- обеспечивают самодиагностику;
- их память обладает достаточной емкостью для размещения небольших SCADA – систем;
- многие из них имеют автонастройку регуляторов.
Под SCADA (от англ. supervisory control and data acquisition, диспетчерское управление и сбор данных) понимают программный пакет, предназначенный для разработки или обеспечения работы в реальном времени систем сбора, обработки, отображения и архивирования информации об объекте мониторинга или управления.
Дата добавления: 2016-01-18; просмотров: 4309;