Двигатель с параллельным возбуждением
На рис. 1.25 показана схема включения двигателя с параллельным возбуждением с пусковым RП и регулировочным RШ реостатами. Пусковой реостат необходим для ограничения тока якоря IЯ при пуске двигателя. Пока двигатель не набрал большие обороты, ЭДС якоря ЕЯ, противодействующая току якоря, еще мала, и ток IЯ может иметь очень большую величину. При пуске величину пускового реостата RП выбирают максимальной. Регулировочный реостат RШ при пуске наоборот выводят, что обеспечивает получение максимальных значений ЭДС якоря ЕЯ и пускового момента МВР.
Основной характеристикой двигателя является механическая характеристика, выражение для которой можно получить, использовав соотношения (1.26) и (1.27). Тогда
 (1.29)
(1.29)
В выражении (1.29) RЯ – сопротивление обмотки якоря; U –питающее напряжение; Ф – главный магнитный поток возбуждения. При неизменном магнитном потоке Ф, согласно (1.29), механическая характеристика двигателя с параллельным возбуждением графически будет представлять прямую линию, наклоненную в сторону оси абсцисс. Такую механическую характеристику называют естественной.
|
| Рис. 1.25 – Схема включения двигателя с параллельным возбуждением |
Если в цепь якоря включено активное сопротивление RП >0, то получим искусственную механическую характеристику.
При неизменном моменте МВР на валу двигателя путем изменения сопротивления RП можно регулировать обороты п двигателя. Однако, учитывая большую величину тока якоря, такое регулирование будет неэкономичным.
|
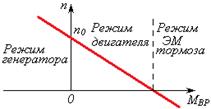
| Рис. 1.26 – Универсальная характеристика машины постоянного тока |
Учитывая, что ток возбуждения намного меньше тока якоря (IВ ≤ 0,03IЯ), то регулирование частоты вращения двигателя за счет изменения магнитного потока Ф путем изменения тока IВ с помощью резистора RШ экономически более выгодно.
На рис. 1.26 приведена универсальная характеристика для машины постоянного тока с параллельным возбуждением. Она характеризует режимы работы машины в зависимости от момента МВР на валу двигателя. При отрицательном моменте, который может создаваться внешним приводным двигателем и скорости вращения якоря, превосходящей частоту вращения холостого хода п0, машина будет работать в режиме генератора и будет отдавать энергию во внешнюю сеть. Если двигатель нагрузить тормозящим ротор моментом, то он будет вращаться с частотой п<п0 и отдавать механическую энергию с некоторой мощностью РВЫХ. Если же приложить к валу двигателя достаточно большой тормозной момент, то двигатель остановится. А если тормозной момент активный, создаваемый, например, едущим под уклон троллейбусом или опускающимся большим грузом подъемного крана, то машина из режима двигателя перейдет в режим электромагнитного (ЭМ) тормоза. При этом ток якоря
IЯ = (U + EЯ)/(RЯ + RН), (1.30)
где RН – нагрузочный реостат, который нужно подключить для ограничения тока якоря.
Если в процессе торможения двигатель отключить от сети, получим динамическое торможение. Тогда ток якоря
IЯ = EЯ /(RЯ + RН), (1.31)
Режим динамического торможения используется для быстрой остановки электропривода.
Дата добавления: 2016-01-18; просмотров: 891;