Аналитический способ.
u(4)1–Н = 1 – u(Н)1–4
Минусовой механизм.
Синтез (проектирование) планетарных механизмов.
Под синтезом в этом курсе будем понимать подбор (определение) чисел зубьев планетарных механизмов при условии, что зубчатые колеса нулевые, а радиальный габарит механизма минимальный.
Расчет на прочность не проводим, но он обязательно должен быть проведен при проектировании.
При проектировании конструктор обязан выполнить ряд условий:
1. Отклонение от заданного передаточного отношения не должно превышать 10% (5%).
2. Обеспечить отсутствие подреза у нулевых зубчатых колес:
У колес с внешними зубьями z1, z2, z3 ≥18 ;
У колес с внутренними зубьями z ≥85.
Если колеса не нулевые, то zmin до 7 илидо 56.
3. Обеспечить отсутствие заклинивания в зацеплении сателлит – коронная шестерня.
Заклинивания нет, если zкш – zсат ≥ 8
4. Обеспечить выполнение условия соосности входного и выходного звеньев.
5. Необходимо обеспечить выполнение условие соседства (окружности вершин соседних сателлитов не должны касаться друг друга).
6. Обеспечить выполнение условия сборки. Определить условие сборки, исходя из чертежа невозможно, необходимо проверить выполнение этого условия по уравнению (см. далее).
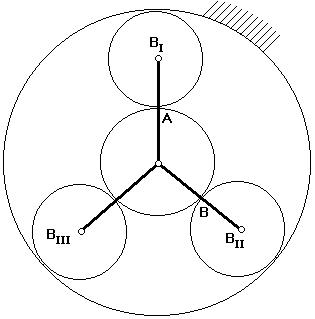
Проектирование однорядного планетарного механизма.
Дано: u(4)1–Н = 6
m = 1 мм
k = 3 – количество сателлитов
Определить: z1, z2, z3 – ?
при минимальном радиальном габарите;
колеса – нулевые.
 à
à 
Зададимся числом зубьев z1 так, чтобы выполнялось условие 2, тогда z1 = 18, z3 = 5 . 18 = 90 ≥ 85.
Условие соосности записывается в виде
О1В = О2В
r1 + r2 = r3 – r2
z1 + z2 = z3 – z2
Получим условие соседства.
 Условие соседства: окружности вершин соседних сателлитов не касаются друг друга
Условие соседства: окружности вершин соседних сателлитов не касаются друг друга
ВIBII > 2 ra2 (1)
Рассмотрим треугольник O1BIq :
BIBII = 2BIq


2BIq = BIBII = m(z1 + z2) (2)
ra2 = r2 + xm + ha*m – ∆ym
Т.к. колеса нулевые, то xm = 0 и ∆ym = 0
ra2 = r2 + ha*m
ra2=  (z2+2ha*)
(z2+2ha*)
2ra2 = m(z2 + 2ha*) (3)
Подставим (3), (2) в (1)
 (4)
(4)
Уравнение соседства справедливо для всех схем, только для схем 2, 3 и 4 в знаменателе стоит правая или левая часть условия соосности, а в числителе вместо z2 ставят число зубьев наибольшего из сателлитов.
Условие сборки:
 | 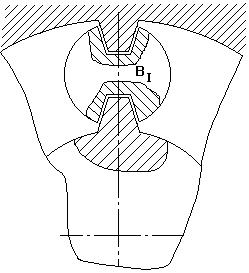 | ||
Будем считать, что каждый последующий блок сателлитов устанавливается в позиции ВI.
Чтобы освободить место, нужно повернуть водило на угол (360о / k).
При установке 1–го сателлита зубья центральных колес ориентированы относительно оси симметрии.
Если на дуге АВ укладывается целое число шагов, то при повороте водила на угол (360о/k) зубья центральных колес будут ориентированы относительно оси симметрии точно так же, как и при установке первого сателлита.
Если на указанной дуге не укладывается целое число шагов, то при повороте водила на угол (360о / k) зуб 1–го колеса не встанет на то же место и тогда, чтобы установить следующий сателлит, нужно от позиции ВII сделать р дополнительных оборотов водила, чтобы за счет выборки углового шага правильно ориентировать зубья центральных колес.
Уравнение сборки имеет вид:
 = (1 + kp) = γ ,где γ – целое число.
= (1 + kp) = γ ,где γ – целое число.
Для нашего случая: 18.6 (1+ 3р) / 3 = 36 (1+3р)
Условие сборки выполняется при р = 0.
После подбора чисел зубьев определяют радиусы делительных окружностей колес:
 мм
мм
 мм
мм
 мм
мм
По полученным данным строится схема механизма в масштабе и проверяется выполнение передаточного отношения.
5.3.2 Проектирование планетарного механизма со смешанным зацеплением.
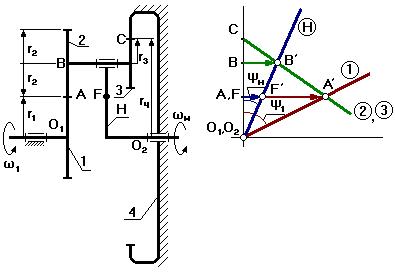
Дано:
 m=1 мм
m=1 мм
Определить:
z1, z2, z3, z4
при условии:
k=3
радиальные габариты – min
колеса – нулевые.
Исходная формула:
u(4)1–Н = 1 – u(Н)1–4= 1 + 
= u(4)1–Н – 1 = 21 – 1 = 20
Представим число (20/1) в виде произведений сомножителей:
Где С1~z1 при этом С1, С2, С3, С4 – взаимно
С2~z2 простые числа, то есть не имеют
С3~z3 общих делителей.
С4~z4
Указываются все возможные разложения
1: С1= 4 С2= 1 С3= 1 С4= 5
Запишем условие соосности данного редуктора
О1В=О2В
r1 + r2 = r4 – r3
m ( z1 + z2 ) = m ( z4 – z3 )

В результате преобразований
z1 = C1 ( C4 – C3 ) q
z4 = C4 ( C1 + C2 ) q
где q – коэффициент пропорциональности – любое число но такое, чтобы z было целым.

тогда
z2 = C2 ( C4 – C3 ) q
z3 = C3 ( C1 + C2 ) q
z1 = 1 ( 5 – 1 ) q = 4q z1 = 20
z2 = 4 ( 5 – 1 ) q = 16q z2 = 80
z3 = 1 ( 1 + 4 ) q = 5q z3 = 25
z4 = 5 ( 1 + 4 ) q =25q z4 = 125
q назначается так, чтобы не было подреза, например q = 5.
Проверяем выполнение условия соседства:
0,87 > 0,82
Условие соседства выполняется.
Проверяем выполнение условия сборки:
= (1 + kp) = γ (a)
20 . 21( 1+3p) / 3 = 140 при p = 0
Для передач со сдвоенными сателлитами формула (а) не является общей. Общей формулой является:
 – целое
– целое
Условие сборки выполняется.
Если хотя бы одно из условий не выполняется, то необходимо рассмотреть следующий вариант разложения на простые множители.
Если, перебрав все возможные варианты разложения, не удалось подобрать числа зубьев, то допускается изменить заданное передаточное отношение в пределах 10 %.
Для других схем числа зубьев подбираются по формулам, представленным в таблице:
| 2 внутренних зацепления Схема 3 | 2 внешних зацепления Схема 4 | |
| Условие соосности | z1 – z2 = z4 – z3 | z1 + z2 = z4 + z3 |
| z1 | C1 ( C4 – C3 ) q | C1 ( C4 + C3 ) q |
| z2 | C2 ( C4 – C3 ) q | C2 ( C4 + C3 ) q |
| z3 | C3 ( C1 – C2 ) q | C3 ( C1 + C2 ) q |
| z4 | C4 ( C1 – C2 ) q | C4 ( C1 + C2 ) q |
Кулачковые механизмы.
Кулачковым называется механизм, который содержит два основных звена: кулачок и толкатель, образующих высшую кинематическую пару.
Кулачковые механизмы нашли широкое применение в системах газораспределения ДВС, в системах управления электроцепей в вагонах метрополитена (контроллеры).
Достоинства кулачковых механизмов:
1. возможность воспроизведения практически любого закона движения выходного звена;
2. малое количество деталей (кулачок и толкатель), что позволяет просто изготавливать и обслуживать.
Недостаток:
 наличие высшей кинематической пары, в которой могут возникать повышенные удельные давления, что может привести к разрушению поверхности кулачка.
наличие высшей кинематической пары, в которой могут возникать повышенные удельные давления, что может привести к разрушению поверхности кулачка.
Кулачок
Толкатель
Ролик
Пружина
Контакты
Поверхность кулачка, с которой взаимодействует толкатель – рабочий профиль кулачка (действительный).
Поверхность, проходящая через точку В и отстоящая от действительного профиля на расстоянии радиуса ролика – теоретический профиль.
§6.1 Основные схемы кулачковых механизмов.
6.1.1 Кулачковый механизм с поступательно движущимся толкателем.
 а) с центральным толкателем (ось толкателя проходит через ось вращения кулачка);
а) с центральным толкателем (ось толкателя проходит через ось вращения кулачка);

С заостренным
Толкателем
 б) с внеосным толкателем.
б) с внеосным толкателем.
е – эксцентриситет
внеосность левая, т.к. ось толкателя проходит справа оси вращения кулачка.
Дата добавления: 2016-01-18; просмотров: 765;