Сельсины и вращающиеся трансформаторы как датчики угла и рассогласования
В автоматизированном электроприводе сельсины и вращающиеся трансформаторы используются как датчики угла и рассогласования. Датчик угла преобразует угловую координату в напряжение, которое определяет сигнал обратной связи по углу перемещения объекта или сигнал управления в задающих устройствах. Датчик угла рассогласования образуется двумя датчиками угла, один из которых является командным, а другой – исполнительным. Задание на движение системы может выполняться с помощью датчика угла рассогласования, угловой координатой которого является угол поворота командной оси. Разность сигналов между командной и исполнительной осью используется как сигнал управления системой.
Сельсин представляет собой маломощную машину переменного тока с однофазной обмоткой возбуждения и трехфазной обмоткой синхронизации. Конструктивно выделяются контактные и бесконтактные сельсины. Основное исполнение первых – обмотка возбуждения расположена на роторе, а обмотка синхронизации – на статоре. Этим достигается уменьшение числа контактных колец до двух и исключаются контакты на синхронизирующей связи. Бесконтактные сельсины реализуются двумя способами. При первом способе благодаря специальной конструкции магнитопровода ротора неподвижная кольцевая обмотка возбуждения создает в роторе поток, поворачивающийся вместе с ротором. При втором – обмотка ротора получает питание от вращающейся совместно с ротором вторичной обмотки кольцевого трансформатора возбуждения с неподвижной первичной обмоткой.
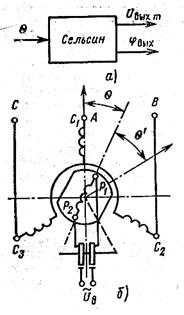
Рисунок 38 – Координаты (а) и схема (б) сельсина
В схемах датчиков угла входная координата сельсина – угол поворота его ротора q, а выходная координата – амплитуда Uвых..m или фаза j выходного напряжения (рис.4) по отношению к опорному напряжению.
В амплитудном режиме Uвых..m = f(q) обмотка возбуждения получает питание от сети переменного тока. Тогда напряжение обмотки возбуждения Uв равно по отношению к амплитудному Uв..m:
 . (38)
. (38)
Магнитный поток, действующий по осевой линии обмотки возбуждения, наводит фазные ЭДС «е» в обмотке статора (рисунок 38б):
 ,
,
 ,
,
 ,
,
где kт – коэффициент трансформации между фазной статорной и роторной обмотками при их соосном положении.
Характеристика управления сельсина в амплитудном режиме после преобразований и предварительном повороте сельсина на 900 имеет вид:

 , (39)
, (39)
где Eу – ЭДС управления.
В режиме фазовращателя характеристика управления имеет вид: j = q.
Основные характеристики сельсина как датчика и приемника:
 ;
;  ;
;  ;
;  ;
;  , (40)
, (40)
где Мст – статический вращающий момент сельсина; mуд – удельный синхронизирующий момент; mтр – момент трения; mр – реактивный момент сельсина вследствие магнитной и электрической асимметрии сельсинов датчика и приемника; qст – статическая ошибка; А – добротность сельсина.
При выборе параметров сельсинов важными факторами являются напряжение возбуждения (до 110 в), частота питающей сети, класс точности. Максимальная погрешность сельсинов-приемников составляет: в классе точности 1 - ± 0,75; в классе точности 2 - ±0,75…±1,5; в классе точности 3 - ±1,5 …±2,5. Для сельсинов-датчиков в этих же классах точности: ±25; ±25…±0,5; ±0,5…±1,0.
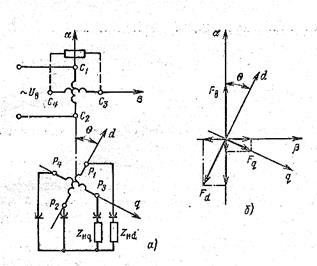
Рисунок 39 – Схема (а) и векторная диаграмма (б) СКВТ
Для увеличения точности углового датчика на базе сельсина разработаны синусно-косинусные вращающиеся трансформаторы (СКВТ). На статоре и роторе СКВТ расположены по две обмотки. На неявнополюсном статоре – обмотка возбуждения по продольной оси и квадратурная обмотка управления по поперечной оси. На роторе – синусная и косинусная обмотки. Обмотка возбуждения питается от однофазной сети и организует пульсирующий магнитный поток, пронизывающий обмотки ротора.
В амплитудном режиме для косинусной обмотки, расположенной по оси d, и синусной – по оси q имеем:
 ,
,  , (41)
, (41)
где Em – амплитуда ЭДС.
В режиме фазовращателя обмотки статора получают питание от источника двухфазного напряжения. Образующееся при этом круговое поле наводит ЭДС в обмотке ротора, фаза которой линейно изменяется при повороте ротора. Характеристика управления в режиме фазовращателя имеет вид: j = q¢, где q¢ = q + p/4. Максимальные угловые погрешности СКВТ от нулевого до третьего классов точности составляют от 4 до 22 минут.
Два сельсина или СКВТ образуют датчик угла рассогласования. При разных схемах соединения сельсинов или СКВТ можно получить индикаторный, трансформаторный или дифференциальный режим датчиков. Область использования – следящие системы.
В индикаторном режиме характеристика управления определяется разностью углов датчика и приемника с учетом статической ошибки сельсинов или СКВТ:
j = Dq ± qст, где Dq = qдт - qпр.
Индексы «дт» и «пр» соответствуют датчику и приемнику.
В трансформаторном режиме:
 , (42)
, (42)
где kдп – коэффициент, зависящий от параметров обмоток датчика и приемника; Uу – напряжение управления, полученное на выходе обмотки возбуждения сельсина-приемника или на квадратурной обмотке приемника СКВТ.
В дифференциальном режиме используются два датчика и один приемник. Приемник отрабатывает разность углов датчиков с учетом знака угла и организует угловую координату для функции управления:
j = qпр.д ; qпр.д = qсд1 - qсд2 , (43)
где qпр.д – угол поворота дифференциального приемника; qсд1 и qсд2 – углы поворота первого и второго датчиков.
Датчики скорости
В автоматизированном электроприводе датчики скорости используются для преобразования скорости двигателя или скорости движения рабочего органа механизма в электрический сигнал для организации обратной связи по скорости. В качестве аналоговых датчиков скорости применяются тахогенераторы постоянного и переменного тока.
Тахогенератор постоянного тока представляет собой микромашину постоянного тока с независимым возбуждением или постоянными магнитами, входной координатой которого является угловая скорость w, а выходной – напряжение Uвых, выделяемое на сопротивлении нагрузки.
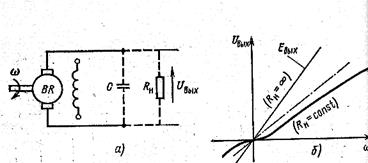
Рисунок 40 – Схема (а) и характеристика управления (б) тахогенератора постоянного тока
 , (44)
, (44)
где Ф – магнитный поток возбуждения; k – конструктивная постоянная; kтг – передаточный коэффициент тахогенератора; Rтг – сопротивление якорной обмотки и щеточного контакта тахогенератора; Rн – сопротивление нагрузки.
Характеристика управления нелинейная в области малых и больших скоростей. В первом случае для уменьшения нелинейности используют металлизированные щетки, во втором – ограничивают скорость сверху и увеличивают сопротивление нагрузки. Тахогенераторы высокой точности выполняются с полым беспазным якорем и дополнительно к выходу генератора подключают конденсатор, выполняющий роль фильтра «С». Передаточная функция при этом имеет вид
 , (45)
, (45)
где Тф – постоянная времени фильтра.
 , (46)
, (46)
где С – емкость фильтра.
Тахогенераторы переменного тока выполнены на базе асинхронной двухфазной машины (рисунок 41).
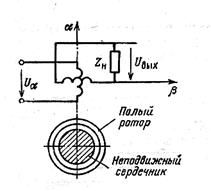
Рисунок 41 – Тахогенератор переменного тока
На статоре имеются две взаимно перпендикулярные обмотки: обмотка возбуждения, расположенная по оси a, и выходная обмотка управления, расположенная по оси b. Последняя включена на сопротивление нагрузки тахогенератора. Для уменьшения момента инерции ротор выполняется тонкостенным в виде полого стакана из немагнитного материала. Внутри ротора размещается неподвижный стальной шихтованный сердечник, по которому замыкается магнитный поток.
Амплитудные значение ЭДС и передаточного коэффициента ТГ:
Eвых.m = kтг ∙ω,
 . (47)
. (47)
Коэффициенты А и В:
 , (48)
, (48)  ,
,
где  ;
;  – приведённое к обмотке статора сопротивление ротора;
– приведённое к обмотке статора сопротивление ротора;  - индуктивное сопротивление намагничивания; Rc и хc – активное и индуктивное сопротивление рассеяния обмотки статора;
- индуктивное сопротивление намагничивания; Rc и хc – активное и индуктивное сопротивление рассеяния обмотки статора;
ω* = ω/ ωс – относительная скорость ротора; ω – изменяемое значение скорости; ωс – синхронная скорость ротора.
Рисунок 42 – Характеристики управления тахогенератора переменного тока
Асинхронные тахогенераторы имеет достаточно высокую точность. Линейность характеристик определяется погрешностью менее 0,5%. По сравнению с тахогенераторами постоянного тока обладает существенно меньшим передаточным коэффициентом.
Существенными преимуществами в точности по сравнению с аналоговыми имеют цифровые датчики скорости.
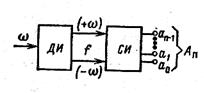
Рисунок 43 – Структурная схема цифрового датчика скорости
Структурно в датчике выделяются две части: датчик импульсов ДИ и счетчик импульсов СИ. ДИ является импульсным преобразователем и преобразует угловую скорость вала в импульсы с частотой f, пропорциональной скорости. Задача кодового преобразователя СИ как счетчика импульсов формировать на интервале измерения Т цифровой код Аn выходной величины датчика скорости.
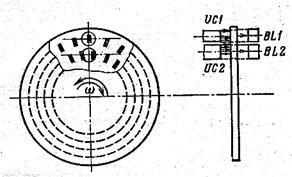
Рисунок 44 – Кодовый диск фотоэлектрического датчика импульсов
ДИ выполняется на основе фотоэлектрического кодового диска (рисунке 43) и вырабатывает две серии импульсов, сдвинутых по фазе на 900, которые используются для определения величины и знака угловой скорости. На двух дорожках расположены пропускающие свет щели. Свет от источников ИС1 и ИС2 через щели попадает на фотодиоды BL1 и BL2, которые при этом открыты и пропускают ток. Когда щель выходит из луча света, фотодиоды запирают цепь. При вращении диска с угловой скоростью w фотодиоды дают чередование максимального и минимального сигналов с частотой
 , (49)
, (49)
где Nди – импульсная емкость кодового диска (число импульсов на один оборот диска).
Среднее значение скорости определяется числом импульсов N на периоде измерения T:
 . (50)
. (50)
Точность цифрового датчика увеличивается с увеличением измеряемой скорости и периода измерения.
Дата добавления: 2016-01-16; просмотров: 7212;