Магнитные усилители
Принцип действия МУ основан на использовании явления насыщения ферромагнитных материалов в магнитном поле.
а) б)
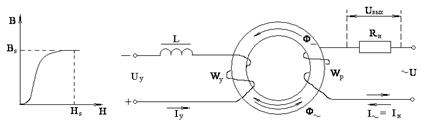
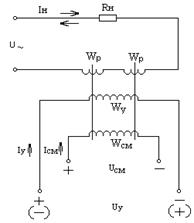
Рисунок 47 – Простейший дроссельный однотактный магнитный усилитель
а – зависимость магнитной индукции В от напряженности магнитного поля Н; б – схема усилителя
Входной цепью МУ (рисунок 47) является обмотка управления Wy, а выходной – рабочая обмотка Wp с последовательно включенным сопротивлением нагрузки Rн. Выходное напряжение Uвых снимается с нагрузки Rн.
Если ток в рабочей цепи I~ синусоидален, то он находится по формуле:
 , (70)
, (70)
где U~ – напряжение питания МУ;
R – полное активное сопротивление рабочей цепи;
хр – индуктивное сопротивление рабочей обмотки.
 , (71)
, (71)
где Rp – активное сопротивление рабочей обмотки;
Lp – индуктивность рабочей обмотки;
 – угловая частота питающей сети;
– угловая частота питающей сети;
Wp – число витков рабочей обмотки;
Sc – площадь поперечного сечения ферромагнитного сердечника;
 – длина средней магнитной линии сердечника;
– длина средней магнитной линии сердечника;
 – магнитная проницаемость сердечника.
– магнитная проницаемость сердечника.
Для магнитных усилителей выбирается ферромагнетик с большой и малой коэрцитивной силой Hc, например, пермаллой. Такой магнитный материал имеет максимально возможную чувствительность к слабым изменениям магнитного поля. Вследствие нелинейности характеристики B = f (H) малое изменение H, связанное с постоянным током обмотки управления Wy, приводит к резкому увеличению B и уменьшению , что ведет к значительному уменьшению Lp и  . Наблюдается резкое увеличение тока I~ в рабочей цепи.
. Наблюдается резкое увеличение тока I~ в рабочей цепи.
Однотактные магнитные усилители относятся к нереверсивным: полярность выходного сигнала не зависит от полярности входного сигнала. Нагрузка Rн может быть включена последовательно или параллельно в сеть рабочей обмотки Wp. В первом случае МУ называют дроссельными, во втором – трансформаторными. Наиболее эффективным является построение МУ на двух одинаковых сердечниках.
а) б)
в)
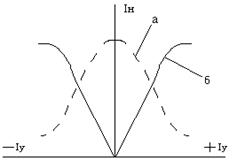
Рисунок 48 – Однотактные МУ с параллельным (а) и последовательным (б) включением нагрузки и их статические характеристики (в)
Основной характеристикой МУ является статическая характеристика:
Iн = f(Iy), (72)
где Iн– ток нагрузки,
Iy– ток управления.
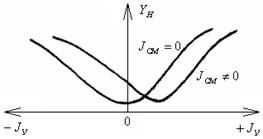
Характеристика идеального МУ без обратной связи и смещения показан на рисунке 2. Для реального МУ ток холостого хода (Iн при Iy=0) отличен от нуля.
Коэффициенты усиления по току kI, напряжению kU, мощности kР находятся экспериментально по статическим характеристикам и теоретически по соотношениям:
 (73)
(73)
 (74)
(74)
 , (75)
, (75)
где Δ определяет малые приращения входных и выходных величин.
На характеристики Iн = f(Iy) значительно влияют начальное смещение (подмагничивание) и обратные связи. Начальное смещение вводится для того, чтобы увеличить коэффициент усиления для малых входных сигналов и выводе рабочей точки на линейный участок статической характеристики (рисунок 49).
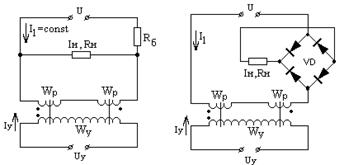
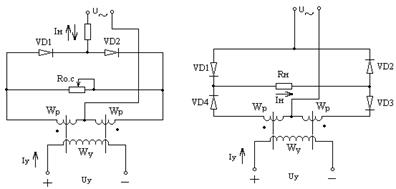
Обратные связи могут быть положительными и отрицательными, внешними и внутренними. Внутренняя обратная связь организуется включением выпрямителя в рабочую обмотку Wp, поэтому число витков обмотки обратной связи Woc=Wp и коэффициент обратной связи koc ≤ 1. Рабочая обмотка Wp дополнительно выполняет функции обмотки обратной связи Woc. Схема однотактных МУ с внутренней обратной связью показана на рисунке 50, а статические характеристики – на рисунке 51.
а)
б)
Рисунок 49 – Дроссельный МУ: а – схема; б – статические характеристики
а) б)
Рисунок 50 – Однотактные МУ с внутренней обратной связью:
с выходом на переменном токе (а); с выходом на постоянном токе (б)
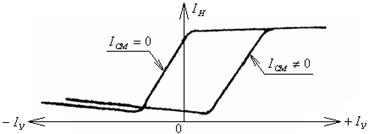
Рисунок 51 – Статические характеристики МУ с внутренней ОС
Схема МУ с внешней обратной связью может обеспечить любое значение koc за счет соответствующего выбора числа витков Woc. Одна из схем показана на рисунке 52.
В этом случае коэффициенты усиления равны:
 (76)
(76)
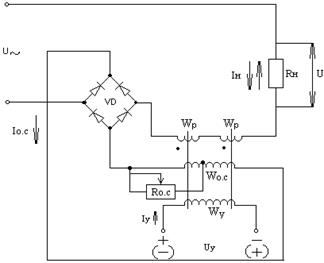
Рисунок 52 – МУ с внешней обратной связью
 (77)
(77)
 , (78)
, (78)
где знак “–” соответствует положительной, а “+”– отрицательной обратной связи.
 (79)
(79)
где  .
.
Использование смешанной обратной связи, объединяющей внутреннюю и внешнюю обратные связи может привести релейным характеристикам (рисунок 53).
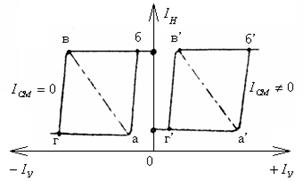
Рисунок 53 – Релейные характеристики МУ
Релейная характеристика в первом квадранте соответствует нормально разомкнутым, а во втором – нормально замкнутым контактам реле.
Инерционность МУ характеризуется постоянной времени τ.
 , (80)
, (80)
где  – коэффициент полезного действия цепи переменного тока усилителя;
– коэффициент полезного действия цепи переменного тока усилителя;
 – частота питающей сети;
– частота питающей сети;
 – индуктивность обмотки управления.
– индуктивность обмотки управления.
Для снижения инерционности используют введение положительной обратной связи при условии  , замену однокаскадного МУ многокаскадным, шунтирование диодов внутренней обратной связи переменными сопротивлениями и другие методы.
, замену однокаскадного МУ многокаскадным, шунтирование диодов внутренней обратной связи переменными сопротивлениями и другие методы.
Передаточная функция W(p) магнитного усилителя определяет его как апериодическое звено первого порядка:
 , (81)
, (81)
где p – оператор Лапласа.
Дата добавления: 2016-01-16; просмотров: 3387;