ЗАМЕНА ИНТЕГРАТОРОВ ПОЛОСОВЫМИ ФИЛЬТРАМИ
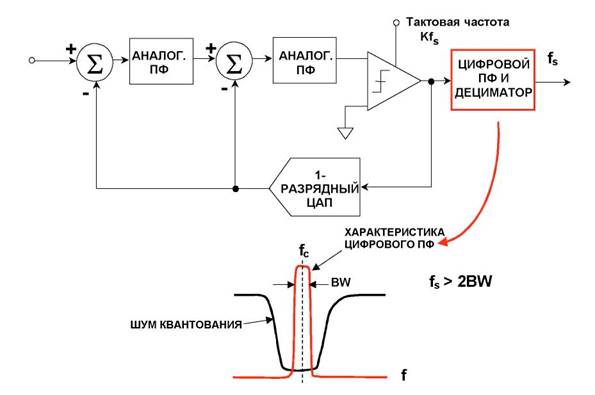
Рис. 3.20
В приложениях, использующих субдискретизацию и полосовые Σ∆ АЦП, минимальная частота дискретизации должна быть, по крайней мере, в два раза больше удвоенной ширины полосы сигнала BW. Сигнал концентрируется вокруг несущей частоты fc.
Типичная цифровая радиосистема, использующая центральную частоту 455 кГц и ширину полосы сигнала 10 кГц, описана в Приложении 1. Частота избыточной дискретизации Kfs = 2 MSPS и выходная скорость потока цифровых данных fs = 20 КSPS обеспечивают динамический диапазон 70 дБ в пределах ширины полосы сигнала.
Большинство Σ∆ АЦП имеют встроенный цифровой фильтр с фиксированными параметрами. Частота среза фильтра и скорость потока выходных данных являются кратными частоте тактового генератора. Модель AD7725 является 16-разрядным Σ∆ АЦП с внутренним программируемым цифровым фильтром. Максимальная частота избыточной дискретизации модулятора составляет 19,2 MSPS. Выход модулятора подключен к КИХ-фильтру с фиксированными параметрами, который осуществляет децимацию данных, поступающих с выхода модулятора, с коэффициентом 8, выдавая выходные данные со скоростью 2,4 MSPS. Выходной сигнал от КИХ-фильтра с фиксированными параметрами подается на программируемый КИХ-фильтр. Загружая ПЗУ подходящими значениями коэффициентов, этот фильтр может быть запрограммирован для реализации желаемой частотной характеристики.
Программируемый фильтр обладает способностью гибко менять число своих коэффициентов и коэффициент децимации. Фильтр может иметь до 108 коэффициентов,
до 5 каскадов децимации и коэффициент децимации в диапазоне от 2 до 256. Точность коэффициентов – 24 разряда, арифметическая точность – 30 разрядов.
Модель AD7725 содержит постпроцессор PuldeDSP™ (торговая марка Systolix) компании Systolix, который позволяет программировать характеристики фильтра через параллельный или последовательный интерфейс микропроцессора. Кроме того, характеристики фильтра могут загружаться при включении/сбросе питания из его внутреннего ПЗУ или из внешнего программируемого ПЗУ.
Постпроцессор является полностью программируемым ядром, которое обеспечивает, мощность обработки до 130 миллионов операций умножения с накоплением (MAC) в секунду. Для программирования постпроцессора пользователь должен создать конфигурационный файл, который содержит настраиваемые данные фильтра. Этот файл может быть сгенерирован компилятором, который поставляется компанией Analog Devices. Компилятор AD7725 воспринимает набор коэффициентов фильтра как исходные данные и автоматически создает необходимый файл.
Файл коэффициентов для характеристики КИХ-фильтра (FIR) может быть сгенерирован с использованием пакетов проектирования цифровых фильтров, таких как QEDesign от Momentum Data Systems. Характеристики фильтра можно вывести на печать, позволяя, таким образом, пользователю ознакомиться с ней перед генерацией коэффициентов фильтра. Процессор осуществляет доступ к данным на скорости 2,4 MSPS. Когда в многокаскадном фильтре используется прореживание, первый каскад фильтра работает с быстродействием 2,4 MSPS, благодаря чему пользователь может выполнять прореживание между каскадами. Количество обслуживаемых процессором сигналов равно 108. Поэтому возможна генерация одного 108-сигнального фильтра или может быть спроектирован многокаскадный фильтр на 108 сигналов. Фильтр может иметь характеристики ФНЧ, ФВЧ, полосового режекторного фильтра или просто полосового фильтра.
Модель AD7725 питается однополярным напряжением +5V, имеет встроенный источник опорного напряжения 2,5V и выполнена в 44-контактном корпусе (PQFP). При работе на полную мощность рассеиваемая энергия равна приблизительно 350 мВт. Имеется режим работы с пониженным потреблением, который позволяет использовать частоту тактового генератора 10 MSPS. Максимальная потребляемая мощность в пассивном режиме составляет 200 мВт. Более подробное описание функционирования AD7725 можно найти в разделе 9.
Резюме
Σ∆ АЦП работает в режиме избыточной дискретизации. В этом режиме простые аналоговые фильтры Σ∆-модулятора формируют кривую распределения шума квантования таким образом, что отношение сигнал/шум (SNR) в заданной полосе пропускания намного больше, чем в других случаях. Благодаря использованию высококачественных цифровых фильтров и дециматора, производится подавление шума за пределами требуемой полосы пропускания. Избыточная дискретизация имеет дополнительный плюс, понижая требования к ФНЧ, применяемому для подавления эффекта наложения спектра. Поскольку аналоговая цепь относительно неприхотлива, ее можно строить с использованием той же цифровой технологии сверхвысокой степени интеграции (VLSI), которая используется для изготовления цифровых фильтров ЦОС. Поскольку основой АЦП является одноразрядный компаратор, применяемая методика является принципиально линейной.
Хотя детальный анализ Σ∆ АЦП затрагивает весьма сложную математику, их основные принципы могут быть поняты без применения математических выкладок. Для дальнейшего обсуждения Σ∆ АЦП Вы можете обратиться к Приложению1-18.
Дата добавления: 2016-01-07; просмотров: 1135;