ОБЛАСТЬ ПЕРЕХОДА ОТ ПОЛОСЫ ПРОПУСКАНИЯ К ПОЛОСЕ
ЗАДЕРЖКИ: ОТ 0,45 fs ДО 0,55 fs
ВРЕМЯ УСТАНОВЛЕНИЯ = 72 / fs = 1,5 мс ДЛЯ fs = 48 КSPS
ГРУППОВАЯ ЗАДЕРЖКА = 36 / fs = 0,75 мс ДЛЯ fs = 48 КSPS
Рис. 3.18
В других приборах, таких как низкочастотный, с высоким разрешением, 24-разрядный измерительный Σ∆ АЦП (типа серии AD77xx), могут использоваться другие типы цифровых фильтров. Например, фильтры с характеристикой SINC3 популярны, потому что это имеют нули в точках частотной характеристики, кратных скорости обработки данных. В частности, скорость обработки данных 10 Гц (10 отсчетов в секунду) дает нули на частотах 50 Гц и 60 Гц, что способствует подавлению соответствующих составляющих переменного тока.
До сих пор нами рассматривались только Σ∆-преобразователи, содержащие одноразрядный АЦП (компаратор) и одноразрядный ЦАП (коммутатор). Блок-схема на рис.3.19 представляет многоразрядный Σ∆ АЦП, включающий n-разрядный параллельный (flash) АЦП и n-разрядный ЦАП. Очевидно, эта архитектура дает более широкий динамический диапазон при фиксированных коэффициентах избыточной дискретизации и порядке Σ∆-модулятора. Стабилизация здесь проще, так как могут использоваться Σ∆-модуляторы второго и более высоких порядков. Выходные сигналы, соответствующие паузам во входном сигнале, при использовании данной архитектуры имеют тенденцию к большей степени случайности, благодаря чему, минимизируется шум на выходе.
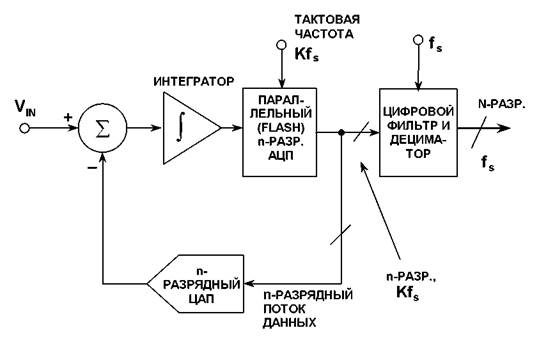
|
| МНОГОРАЗРЯДНЫЙ SIGMA-DELTA АЦП |
Рис. 3.19
Реальным недостатком этого метода является то, что линейность всего устройства зависит от линейности ЦАП, и требуется тонкопленочная лазерная подстройка для приближения к уровню 16-разрядной точности. Это делает чрезвычайно трудной в реализации многоразрядную архитектуру, в том числе и архитектуру Σ∆ АЦП.
Тем не менее, в настоящее время она применяется в звуковых Σ∆ ЦАП (AD1852, AD1853, AD1854), где используются специальные методы скремблирования битов для гарантии линейности и устранения шума.
Описанные выше Σ∆ АЦП содержат интеграторы, играющие роль ФНЧ, полоса пропускания которых начинается от 0 Гц, т.е. с уровня постоянного тока. Таким образом, максимум распределения их шума квантования смещен вверх по частоте. В настоящее время по такому принципу построено большинство коммерчески распространенных АЦП (хотя некоторые, предназначенные для использования в звуковых или коммуникационных приложениях, имеют полосовой фильтр вместо ФНЧ для устранения смещения по постоянному току). Нет никакой принципиально непреодолимой причины, по которой фильтры Σ∆-модулятора должны быть непременно низкочастотными, за исключением того, что традиционно АЦП считались низкочастотными устройствами, а интеграторы проще в реализации, чем полосовые фильтры. При замене интеграторов в АЦП полосовыми фильтрами, показанной на рис.3.20, максимумы распределения шумов квантования смещаются вверх и вниз по частоте, так что область, соответствующая полосе сигнала, становится фактически свободной от шумов (см. Приложение 1). Далее, если цифровой фильтр запрограммирован так, что его полоса пропускания находится в этой области, мы получаем полосовой Σ∆ АЦП вместо низкочастотного. Такие устройства полезны для прямого преобразования ПЧ в цифровой код, в устройствах цифровой радиосвязи, ультразвуковых приложениях и других задачах, использующих субдискретизацию. Но в этом случае модулятор и цифровой полосовой фильтр должны
быть разработаны для определенных частот, требуемых данным приложением, что несколько ограничивает гибкость описываемого подхода.
Дата добавления: 2016-01-07; просмотров: 1052;