Автоматическая завязка траектории при наличии ложных отметок.
При автоматическом обнаружении траекторий из УПО в УВО, наряду с координатами истинных отметок, поступают координаты ложных отметок. В процессе автоматического обнаружения одиночные ложные отметки и траектории, образованные ложными отметками (ложные траектории), должны быть отсеяны. Если очередная поступившая в УВО отметка (истинная или ложная) не может быть отнесена ни к одной из сопровождаемых траекторий, то она должна рассматриваться в качестве первой отметки новой траектории.
Рассмотрим принцип автоматической завязки траектории по данным двухкоординатной РЛС при сопровождении целей в прямоугольной системе координат.
Допустим, что в n-ном обзоре в некоторой точке зоны обзора впервые появилась одиночная отметка, не подходящая для продолжения уже сопровождаемых траекторий. Поскольку по одной отметке невозможно вынести решение о том, что она является началом истинной или ложной траектории, то целесообразно принять эту отметку за начало истинной траектории.
Так как характер движения этой цели неизвестен, то в следующем, (n+1)-ом обзоре отметка, являющаяся продолжением возможной траектории, с равной вероятностью может появиться в любой точке кольцевой зоны с центром в точке расположения первой отметки. Если пренебречь ошибками измерения координат по сравнению с величиной перемещения цели за один период обзора, то внутренний и внешний радиусы этой зоны можно определить следующим образом
rмин = VминT0; rмакс = VмаксT0,
где Vмин, Vмакс - минимально и максимально возможные скорости реальных целей
Т0 - период обзора РЛС.
Для сокращения трудоёмкости вычислительных операций в прямоугольной системе координат кольцевую зону заменяют на область S1, ограниченную внешним прямоугольником со сторонами и и внутренним со сторонами и . Операция формирования области S1, в которой следует искать вторую отметку цели в следующем, (n+1)-ом, обзоре называется стробированием, а сама эта область называется стробом первичного захвата.
В (n+1)-ом обзоре в строб S1 либо может не попасть ни одной отметки, либо попадает одна или несколько отметок.
| Рис.10.3 Процесс автоматического обнаружения траектории
|
| по критерию «2/2+1/0» при критерии сброса «00»
|
Поскольку решение об обнаружении цели (п. 6.1.4.) может приниматься как по целым ("жёстким") логическим критериям типа r/r (2/2, 3/3...), так и по дробным ("мягким") логическим критериям типа r/m (2/3, 3/4...), то во втором случае отсутствие в (n+1)-ом обзоре отметки в стробе S1 не даёт оснований для прекращения завязки. В этом случае к (n+2)-ому обзору строб S1 увеличивается до размеров и . В большинстве случаев отсутствие второй отметки в (n+1)-ом и в (n+2)-ом обзорах является признаком того, что исходная отметка была ложной и информация о ней стирается в памяти ЭВМ.
Допустим, что в строб S1 в (n+1)-ом обзоре попало 3 отметки. Так как неизвестно, какая из них истинная, каждую следует рассматривать как возможное продолжение траектории.
В общем случае процесс автоматического обнаружения траектории слагается из двух этапов:
- на первом этапе осуществляется завязка траектории по критерию r/m (на рис.11.3 показано использование критерия завязки 2/2); в результате завязки определяется направление и скорость движения предполагаемой цели, что позволяет экстраполировать и стробировать её положение на следующий обзор;
- на втором этапе производится подтверждение завязанной траектории, т. е. принимается окончательное решение об обнаружении траектории по критерию l/n (на рис.11.3 пример построен для критерия подтверждения 1/2); второй этап используется при чрезмерно высоком темпе формирования ложных траекторий и в частных случаях его может и не быть.
Алгоритм завязки траектории по критерию r/m совместно с алгоритмом подтверждения по критерию l/n образуют объединённый алгоритм автоматического обнаружения траекторий по критерию "r/m + l/n".
Таким образом, в (n+1)-ом обзоре (рис.11.3) оказались завязанными траектории 1, 2 и 3. Поскольку ещё неизвестно, маневрируют цели или движутся равномерно и прямолинейно, целесообразно предположить, что цели не маневрируют и вычислить экстраполированные координаты целей N1, 2 и 3 на (n+2)-ой обзор (на рис.11.3 обозначены треугольниками). Если траектория является истинной, то в (n+2)-ом обзоре отметка реальной цели может отклониться от экстраполированной точки, во-первых, из-за ошибок вычисления экстраполированных координат, во-вторых, из-за ошибок измерения координат в (n+2)-ом обзоре, в-третьих, из-за случайных отклонений цели от её траектории или из-за невыявленного манёвра, который цель может начать в момент (n+1)-го облучения. Поэтому вокруг экстраполированной на (n+2)-ой обзор точки строится строб вида S2, размер которого должен учитывать возможность манёвра цели, а также ошибки экстраполяции и измерения координат отметки.
Если в какой-либо строб вида S2 в (n+2)-ом обзоре попадает отметка (траектория N2), она считается принадлежащей завязанной траектории; при использовании критерия подтверждения 1/2 процесс автоматического обнаружения считается законченным и начинается процесс автоматического сопровождения траектории. Так как по трём отметкам в n-ом, (n+1)-ом и (n+2)-ом обзорах параметры траектории можно определить с большей точностью, чем по двум отметкам, то вокруг экстраполированной на (n+3)-ий обзор точки можно построить строб третьего вида S3, имеющий меньший размер, чем строб вида S2.
Если при использовании логического критерия подтверждения 1/2 в стробе вида S2 в (n+2)-ом обзоре отметка отсутствует (траектории 1 и 3), то, принимая за истинную отметку экстраполированную точку, вычисляют экстраполированные координаты на (n+3)-ий обзор, строят вокруг них строб вида S2 и при отсутствии в нём отметки в (n+3)-ем обзоре (траектория 1), как правило, прекращают построение траектории, считая её ложной. Такое решение соответствует логическому критерию сброса траектории "два пропуска подряд".
Если же после пропуска отметки в (n+2)-ом обзоре в (n+3)-ем обзоре в стробе вида S2 будет обнаружена отметка, то траектория считается автоматически обнаруженной (траектория 3) и начинается ее автоматическое сопровождение.
ВТОРОЙ УЧЕБНЫЙ ВОПРОС: Использование аппарата цепей Маркова для оценки качества обнаружения.
В полярной системе координат положение строба первичного захвата определяется дальностью Дn и пеленгом Пn первой (новой) отметки, появившемся в зоне автозахвата в n-ом обзоре (рис.11.4).
Если максимально возможную скорость цели принять равной Vмакс, а минимально возможную Vмин= 0, то размер строба первичного захвата по дальности будет равен , а по пеленгу [град]. Число разрешаемых элементов в переделах строба первичного захвата, на каждом из которых с вероятностью Pло может появиться ложная отметка цели, определяется следующим соотношением
где dД, db - разрешающая способность РЛС по дальности и по пеленгу.
Вероятность появления хотя бы одной ложной отметки в стробе первичного захвата

Рассмотрим численный пример:
Vмакс= 800 м/с; Т0= 10 с; dД = 50 м; , db =20; Дn = 100 км; РЛО = 10-3;-4.
Число элементов разрешения, размещающихся в стробе первичного захвата:

Тогда при РЛО=10-3

а при РЛО=10-4

Таким образом, в условиях этого примера ужесточение порогов в решающих схемах УПО, приводящее к уменьшению в 10 раз вероятности ложного обнаружения Рло, обеспечивает уменьшение вероятности появления хотя бы одной ложной отметки в стробе первичного захвата с 77 до 14%. При этом следует иметь в виду, что такое ужесточение порогов приводит к энергетическим потерям полезного сигнала примерно на 1,5 дБ, что вызывает потерю максимальной дальности обнаружения цели в свободном пространстве на 8%.
Важным требованием к любому алгоритму автоматической завязки траектории является минимизация времени завязки после входа цели в зону видимости РЛС. В то же время алгоритм должен предотвращать завязку слишком большого числа ложных траекторий, обусловленную ложными отметками, поступающими из УПО. Следовательно, для того чтобы некоторую последовательность отметок зафиксировать в качестве траектории, необходим определенный интервал времени (работное время завязки траектории). Другими словами, при разработке алгоритма должен быть принят определенный компромисс между скоростью завязки истинных траекторий и допустимым числом ложных траекторий, а работное время завязки траектории может быть использовано в качестве показателя эффективности различных алгоритмов завязки).
Поскольку появление истинных и ложных отметок является случайным событием, то работное время завязки траектории также является случайной величиной, которую обычно характеризуют нарастающей вероятностью завязки траектории в зависимости от числа циклов обзора, прошедших после входа цели в зону видимости РЛС. Более простыми характеристиками являются среднее значение и среднее квадратичное отклонение числа циклов обзора РЛС, необходимых для завязки траектории.
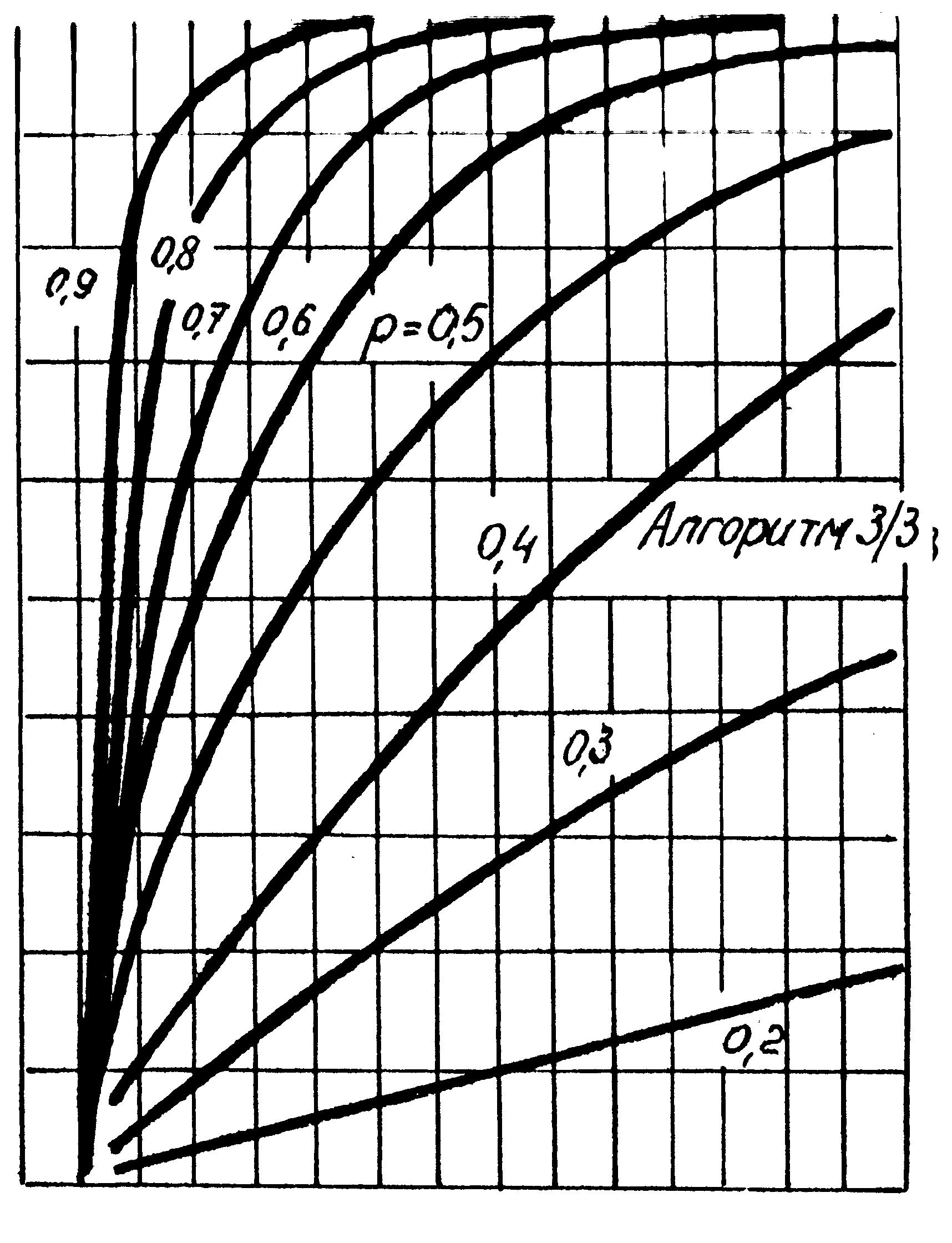
Оценка нарастающей вероятности завязки траектории может быть выполнена с помощью аппарата цепей Маркова. Результаты этой оценки для логического критерия 2/3 показаны, а для логических критериев 2/2, 3/3 и 3/4 - на рис.11.5, 11.6 и 11.7. В качестве параметра этих зависимостей используется вероятность правильного обнаружения Робн при оценке качества завязки истинной траектории, и вероятность появления хотя бы одной ложной отметки в стробе  - для оценки вероятности завязки ложной траектории.
- для оценки вероятности завязки ложной траектории.
В таблице 11.1 приведены величины среднего значения и среднеквадратического отклонения числа обзоров, необходимых для завязки траектории, для различных логических критериев завязки и значений параметра  .
.
| 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
|
| 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
|
| Рис. 11.5 Зависимость вероятности завязки траектории
от числа отметок
|
| 0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
|
| Рис. 11.6 Зависимость вероятности завязки траектории
от числа отметок
|



Рис. 11.7 Зависимость вероятности завязки траектории
от числа отметок
Нетрудно заметить, что минимальным работным временем завязки истинной траектории характеризуется логический критерий 2/3; при вероятности правильного обнаружения истинной отметки Робн = 0,8..0,9 среднее значение числа обзоров, необходимых для завязки истинной траектории, не превышает 2,6. В то же время при вероятности появления хотя бы одной ложной отметки в стробе первичного захвата  ³0,4 достаточно в среднем пяти - шести обзоров для завязки ложной траектории.
³0,4 достаточно в среднем пяти - шести обзоров для завязки ложной траектории.
Логический критерий 3/3 для тех же условий (Робн= 0,8..0,9) требует в среднем от четырёх до шести обзоров для завязки истинной траектории, но при ³0,4 ложная траектория завязывается в среднем лишь за 20..25 обзоров.
Очевидно, что при управлении логическими критериями завязки в процессе радиолокационного наблюдения может быть обеспечена адаптация процесса автоматического обнаружения к условиям функционирования РЛС, т. е. к целевой и помеховой обстановке.
ТРЕТИЙ УЧЕБНЫЙ ВОПРОС:Показатели качества автоматического обнаружения траекторий; проблемы и перспективы повышения качества.
Таблица 11.1
| Тип
критерия
| Параметр
| 0,1
| 0,2
| 0,3
| 0,4
| 0,5
| 0,6
| 0,7
| 0,8
| 0,9
|
| 2/2
| 
| 103,6
| 30,4
| 14,3
| 8,7
| 6,0
| 4,5
| 3,5
| 2,8
| 2,3
|

| 96,1
| 28,4
| 13,0
| 7,5
| 4,6
| 3,1
| 2,1
| 1,4
| 0,8
|
| 2/3
|
| 62,4
| 18,9
| 9,8
| 6,3
| 4,7
| 3,7
| 3,0
| 2,6
| 2,2
|
|
| 60,3
| 17,0
| 8,3
| 5,0
| 3,2
| 2,1
| 1,5
| 1,0
| 0,5
|
| 3/3
|
| 84,3
| 58,1
| 51,4
| 24,9
| 14,0
| 9,1
| 6,4
| 4,8
| 3,7
|
|
| 141,2
| 59,4
| 49,1
| 24,4
| 11,0
| 6,8
| 4,4
| 2,7
| 1,5
|
| 3/4
|
| 141,1
| 56,0
| 25,7
| 13,6
| 8,7
| 6,4
| 4,9
| 4,0
| 3,4
|
|
| 149,0
| 47,3
| 23,2
| 11,4
| 6,2
| 4,0
| 2,5
| 1,6
| 0,8
|
Вместе с тем, как следует из физических соображений и как видно из таблицы 11.1, при использовании любого логического критерия высокое качество процесса завязки траектории может быть обеспечено лишь при достаточно малом значении величины и при достаточно большом значении величины Pобн. Так, в условиях примера, рассмотренного в ранее , при использовании логического критерия 2/3 ложная траектория завязывается в среднем лишь за 45 обзоров при Pло= 10-4 и менее чем за 3 обзора при Pло= 10-3; при использовании логического критерия 3/3 эти показатели составляют примерно 74 и 5 обзоров соответственно. Из таблицы 11.1 также видно, что существенное сокращение работного времени завязки траектории достигается лишь при Робн ³ 0,8, т. е. у ближней границы зоны статистической неопределённости. Таким образом, высокое качество процесса завязки траектории достигается за счёт некоторого уменьшения дальности действия РЛС.
При увеличении числа одновременно сопровождаемых и наблюдаемых на экранах индикаторов ложных траекторий, а также при ограниченном резерве производительности УВО, который может быть выделен для сопровождения ложных траекторий, после завязки траекторий предусматривается процедура их подтверждения. Для сравнения фильтрующей способности объединённых алгоритмов автоматического обнаружения по критерию "r/m + l/n" на рис. 11.8 приведены зависимости среднего числа автоматически обнаруженных и передаваемых на сопровождение ложных траекторий  от среднего за обзор числа ложных отметок
от среднего за обзор числа ложных отметок  , поступающих из УПО в УВО. Величина , связана с вероятностью ложного обнаружения Рло очевидным соотношением
, поступающих из УПО в УВО. Величина , связана с вероятностью ложного обнаружения Рло очевидным соотношением
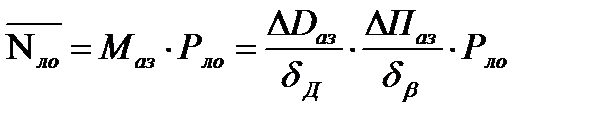 ,
,
где Маз- число разрешаемых элементов в пределах зоны автозахвата;
DДаз, DПаз - размеры зоны автозахвата по дальности и по пеленгу.
Как видно из графиков, фильтрующая способность алгоритмов увеличивается с уменьшением m и n и увеличением l. Увеличение l на единицу приводит к более существенному повышению фильтрующей способности, чем соответствующее уменьшение m и n. Указанные свойства учитываются при выборе алгоритма, предназначенного для практической реализации. При этом приходиться иметь в виду, что чем больше периодов обзора подвергается анализу, т. е. чем больше величины m и n, тем больший объём памяти необходимо выделить для хранения информации.
| Рис. 11.8 Зависимость среднего числа ложных траекторий от среднего числа ложных отметок
|
С целью сравнения различных критериев типа "r/m + l/n" при автоматическом обнаружении истинных траекторий на рис.11.9 в качестве примера приведены зависимости вероятности их обнаружения Ритр от нормированной дальности
Дк/Дмакс, где Дмакс - максимальная дальность действия РЛС; Дк - текущая дальность РЛС на K-том обзоре
 ,
,
где DД - изменение дальности до цели за один период обзора Т0.
Вероятность обнаружения цели в свободном пространстве на K-том обзоре
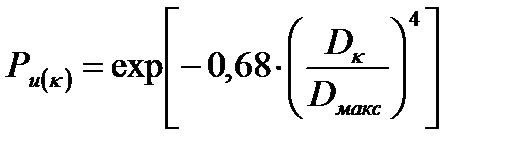 .
.
Как видно из графиков, высокая вероятность автоматического обнаружения истинных траекторий достигается в лучшем случае на дальности, соответствующей 0,75 от максимальной дальности действия РЛС. Логические критерии, наиболее предпочтительные для обнаружения истинных траекторий ("2/4 + 1/4"), обладают низкими фильтрующими свойствами (рис.11.8), что подтверждает необходимость адаптивного управления ими при изменении условий функционирования. Применение критериев подтверждения l/n приводит к существенному увеличению работного времени автоматического обнаружения траекторий.
| Рис. 11.9 Зависимость вероятности обнаружения истинной траектории от относительной дальности до цели
|
Процесс автоматического обнаружения истинных траекторий предполагает необходимость автоматического сброса траекторий, не получивших подтверждения. Критерий сброса траектории после её завязки (критерий фиксации конца траектории) состоит в появлении некоторой фиксированной последовательности (серии) из К пропусков отметок.
Критерий сброса, естественно, является единым как для истинных, так и для ложных траекторий. Поэтому при выборе этого критерия (числа К) необходимо прежде всего иметь в виду возможность пропусков истинных отметок, особенно на больших дальностях. Очевидно, нецелесообразно производить сброс траектории при наличии одного пропуска отметки, т. к. при этом велика опасность сбросить истинную траекторию. С другой стороны, при сбросе по большому числу пропусков увеличивается число ложных траекторий, отвлекающих внимание оператора, затрудняющих анализ обстановки на экранах индикаторов, загружающих память ЭВМ вторичной обработки, снижающих её производительность по сопровождению истинных траекторий. При этом следует иметь в виду, что при отсутствии отметки в текущем обзоре увеличивается интервал экстраполяции координат, а следовательно, увеличиваются ошибки экстраполяции, что вызывает необходимость увеличивать размеры строба и тем самым увеличивать опасность попадания в них ложных отметок. Поэтому наиболее широко применяемым условием сброса траектории является отсутствие отметок на двух смежных обзорах.
Результаты автоматического обнаружения могут отображаться на экранах индикаторов в виде номеров траекторий, автоматически присваиваемых им или при поступлении в УВО первой же отметки или при выполнении логического критерия завязки r/m. В большинстве случаев каждая ложная траектория сопровождается в течение двух-трёх обзоров, после чего, не получая подтверждения в следующих обзорах, сбрасывается с сопровождения, что приводит к гашению номера цели на экранах индикаторов. В этих условиях одновременное отображение трёх-четырёх периодически меняющихся номеров в различных точках экрана практически не затрудняет работу операторов по анализу воздушной обстановки и свидетельствует о нормальном функционировании схем алгоритмов обнаружения отметок. Полное отсутствие завязок ложных траекторий свидетельствует об установке в УПО завышенных порогов, а, следовательно, об уменьшении максимальной дальности обнаружения истинных целей. Чрезмерно большое число одновременно наблюдаемых ложных траекторий требует от операторов принятия мер по "ужесточению" порогов или отказа от использования режима автоматического обнаружения траекторий и перехода к ручному вводу координат визуально наблюдаемых отметок.
Дата добавления: 2016-01-07; просмотров: 2942;



