Использования систем EGPWS (TAWS)
До недавнего времени системы, сигнализирующие об опасном приближении ВС к земле, базировались на аэрометрических показаниях систем воздушных сигналов (барометрических высотомеров) и радиовысотомера, которые преобразовывались в соответствующие звуковые и визуальные предупреждения. Их развитие шло в основном в направлении повышения точности измерений и быстродействия датчиков, а также преобразования данных в цифровую форму.
Первые версии систем предупреждения о приближении к земле были широко внедрены в середине 70-х годов. Примерами таких систем являются аналоговые ССОС - системы сигнализации опасной скорости сближения с землёй и цифровые СППЗ - системы предупреждения приближения земли, или в терминологии ICAO - GPWS (Ground Proximity Warning System). Решение о необходимости разработки таких систем было принято после расследования ряда катастроф, связанных со столкновением с подстилающей поверхностью полностью управляемых ВС, пилотируемых высококвалифицированным лётным экипажем. Эти системы позволили существенно снизить вероятность лётных происшествий типа CFIT, но не исключить их полностью. Обусловлено это тем, что системы типа GPWS только сигнализируют об угрозе столкновения с землёй, да и то не ранее, чем за 5...30 с до столкновения, что не всегда позволяет экипажу выйти из опасной ситуации. Они не представляют достаточной информации экипажу о требуемом характере манёвра (просто набор высоты или отворот от препятствия). Кроме того, в полёте над горной местностью системы GPWS не могут обеспечить адекватной сигнализации; вероятность их ложных срабатываний недопустимо высока, что снижает уровень доверия экипажа к таким системам. Это приводило к случаям, когда экипаж, получив информацию от исправно функционировавшего оборудования об угрозе столкновения, игнорировал рекомендации по набору высоты либо затягивал выполнение набора, пытаясь оценить достоверность сигналов GPWS.
В системах EGPWS (TAWS) значительно расширены технические возможности за счёт использования информации точных навигационных датчиков и цифровых баз данных рельефа и препятствий в районе аэродрома, что в свою очередь стало возможным благодаря:
- уменьшению погрешностей определения текущих координат ВС (широта, долгота, высота) за счёт использования спутниковой навигации GNSS при снятии загрубления точности для систем GPS и использования навигационных вычислителей (FMS);
- доступности достаточно точных цифровых баз рельефа земной поверхности, цифровых аэронавигационных баз данных, вычислительных средств и электронных носителей информации, пригодных для использования на борту ВС;
- возобновлению активных работ по восстановлению отечественной системы спутниковой навигации ГЛОНАСС и планов её широкого коммерческого использования.
Для удовлетворения требований, предъявляемых к данному классу систем, дополнительно ко всем прежним режимам СППЗ (GPWS) в оборудовании EGPWS (TAWS) реализованы дополнительные функции раннего предупреждения и выдача рекомендаций экипажу ВС по выходу из опасной ситуации;
- оценка местности в направлении полёта;
- отображение характера подстилающей поверхности и искусственных препятствий на большом дисплее;
- функция предупреждения о преждевременном снижении в районе аэродрома (PDA - Premature Descent Awareness);
- сигнализация прохода предварительно установленных высот;
- сигнализация неправильной установки уровня давления в барометрических высотомерах.
Необходимость установки бортовых систем EGPWS с функцией оценки рельефа местности по направлению полёта (TAWS) определяется многими зарубежными и отечественными руководящими документами. В частности нормативным документом FAA (США) предписывалось до марта 2005 года оснастить системами TAWS все зарегистрированные в стране пассажирские ВС с газотурбинными двигателями.
Международной организацией гражданской авиации ICAO признано обязательное оснащение всех ВС электронной системой визуального контроля рельефа по курсу - системой TAWS, обеспечивающей световую и звуковую предупреждающую, а также аварийную сигнализацию и выдачу рекомендаций экипажу ВС при опасном сближении с поверхностью земли.
В соответствии с поправкой 27 к части 1 Приложения 6 к Конвенции о международной гражданской авиации «Эксплуатация воздушных судов» [32], принятой на заседании Совета ICAO 15 марта 2002 года в отношении оборудования ВС международного коммерческого воздушного транспорта с газотурбинными двигателями:
- все новые реактивные ВС, сертифицированные после 1 января 2001 года и соответственно выпущенные после этой даты,; взлётная масса которых превышает 15 000 кг с вместимостью более 30 пассажиров, должны быть оборудованы системами предупреждения об опасном сближении с землёй с функцией оценки рельефа местности по направлению полёта (Прил. 6, гл. 1, п. 6.15.6);
- все находящиеся в эксплуатации ВС, взлётная масса которых превышает 15 000 кг с вместимостью более 30 пассажиров, должны быть оборудованы системой предупреждения об опасном сближении с землёй с функцией оценки рельефа местности по направлению полёта до 1 января
2003 года (Прил. 6, гл. 1, п. 6.15.6).
Объединённая Европейская авиационная администрация, в свою очередь, выдвинула требование о том, что системой EGPWS (TAWS) должны быть оборудованы ВС, взлётная масса которых составляет 15 000 кг и более и с вместимостью более 30 пассажиров, до 1 октября 2001 года для вновь выпускаемых самолётов и к 1 января 2005 года - для находящихся в эксплуатации.
В конце августа 2004 года Европейская конференция гражданской авиации направила письмо в Федеральное агентство воздушного транспорта России с намерением с 1 января 2005 года запретить полёты в европейские аэропорты ВС, не оборудованных системой EGPWS с функцией оценки рельефа местности в направлении полёта.
По техническому заданию Росавиации Минтранса России предприятием «ВНИИРА-Навигатор» проведена разработка отечественной аппаратуры аналогичного назначения - СРПБЗ [20]. В системе СРПБЗ реализована функция раннего предупреждения о близости земли, работающая совместно с бортовой базой цифровых данных о рельефе и искусственных препятствиях, а также функция предупреждения о преждевременном снижении ВС в районе аэродрома.
Система СРПБЗ прошла межведомственные квалификационные испытания, завершены лётные испытания системы на ВС Ту-154М и Авиационным регистром Межгосударственного авиационного комитета выдано Свидетельство о годности этого комплектующего изделия. Аналогичную аппаратуру выпускает отечественное предприятие «ТРАНЗАС» [21].
2.2. Принципы функционирования систем EGPWS (TAWS)
Функция TAWS реализована в отдельном независимом модуле, который находится внутри основного блока EGPWS и называется модулем предупреждения столкновений с землёй (GCAM - Ground Collision Avoid Module). Модуль GCAM обеспечивает полный набор сигналов тревоги и предупреждения, чтобы предотвратить катастрофическое столкновение с землёй исправного ВС в управляемом полёте, а также все режимы обычной системы предупреждения столкновений с землёй СППЗ по требованиям стандарта TSO-C151a. Целью TAWS является обеспечение лётного экипажа своевременной информацией о потенциальной опасности в направлении маршрута полёта, которая может привести к столкновению с землёй. Система EGPWS формирует сигнал предупреждения о приближении к земле, рекомендацию по необходимому набору высоты или предупреждение о необходимости обхода в зависимости от положения ВС относительно естественного или искусственного препятствия на земле. Процессор системы EGPWS учитывает специфические ситуации, когда ВС маневрирует в соответствии с одобренными процедурами на высотах значительно ниже местных высот окружающего рельефа (например, заходы в долинах с крутыми склонами). Конструкция TAWS формирует прогноз опасной ситуации на основе реальных лётно-технических характеристик ВС. Такая конструкция минимизирует «ложные тревоги» и повышает доверие экипажа к системе, поскольку формируемые сигналы тревоги представляют реальную опасность. Некоторые модели систем EGPWS зарубежного производства (T2CAS) реализуют дополнительную функцию обнаружения сдвига ветра для предупреждения экипажа, если ВС входит в опасные условия сдвига ветра [22, 23].
Полёт ВС делится на основные этапы: маневрирование на земле (движение по рулёжным дорожкам, разбег, пробег после приземления), взлёт, начальная фаза набора высоты, набор высоты, крейсерский полёт, снижение, полёт в районе аэродрома (начальная фаза захода на посадку), посадка. Учитывая тот факт, что на различных этапах полёта ВС должны быть реализованы различные режимы сигнализации, возникает необходимость в автоматическом определении этапов полёта. Для целей реализации режимов СППЗ выделяют следующие этапы: «на земле», взлёт, полёт, посадка. Этап «на земле» выделяется с целью запрета сигнализации при маневрировании ВС на земле, а также исключения ложных сигнализаций на крайне малых истинных высотах 15...30 м, обусловленных относительно большой погрешностью в определении вертикальной скорости. Этап «на земле» формируется в случае, если истинная высота менее 15 м или принят сигнал обжатия стойки шасси. Из этого этапа возможен переход только в этап взлёта при одновременном выполнении следующих условий: истинная высота более 30 м, передняя стойка шасси не обжата.
Этап взлёта определяется для активизации режимов, предназначенных для предупреждения экипажа о чрезмерном снижении (потере высоты) до достижения безопасной высоты 400 м. Для исключения случайных переходов в другие этапы за счёт «выбросов» в показаниях радиовысотомера вводится 40-секудная задержка с момента активизации этапа взлёта, до истечения которой выход из этапа взлёта запрещается. Как правило, к моменту окончания этапа взлёта шасси и закрылки переводятся в полётное положение.
Этап полёта активизируется после достижения высоты 400 м и продолжается до возникновения ситуации, когда на высоте более 400 м и шасси и закрылки находятся в посадочной конфигурации. При этом осуществляется переход в этап посадки, и разрешаются режимы, предназначенные для предупреждения экипажа об опасностях, характерных для этого этапа.
Система EGPWS с гораздо большей надёжностью решает и задачи обычной системы СППЗ. Она функционирует в следующих случаях:
- чрезмерная скорость снижения ВС;
- чрезмерная скорость сближения ВС с земной поверхностью;
- чрезмерная потеря высоты после взлёта или ухода на второй круг;
- недостаточный запас высоты над местностью при полёте ВС в конфигурации, не соответствующей посадочной. При этом вырабатываются различные предупреждения при невыпуске шасси и/или закрылков;
- чрезмерное снижение ниже глиссады при заходе на посадку по радиомаячным системам ILS или MLS.
Кроме того, система EGPWS может вырабатывать дополнительные сигналы о превышении допустимого значения угла крена, о вероятном сдвиге ветра, о пролёте заранее установленных фиксированных значений истинных высот, а также о достижении высоты принятия решения или посадочного минимума.
Аппаратура T2CAS американской фирмы ACSS основана на более сложных алгоритмах и имеет большие возможности предотвращения столкновений с поверхностью, чем системы EGPWS других фирм [22].
В системе T2CAS предупреждение опасности основывается на определении места возможного столкновения с землёй, а не только на текущем значении высоты над препятствием. Процессор просчитывает опасность в динамике, с учётом маневрирования, выполняемого экипажем ВС. Прогнозируемая системой T2CAS область полёта всегда рассчитывается вдоль траектории полёта ВС, как в наборе, так и при снижении. Прогнозирование в направлении вниз даёт драгоценное дополнительное время для избежания опасности столкновения при преждевременном снижении или снижении с чрезмерно высокой скоростью. Система учитывает текущий вес ВС, температуру, влияющую, как известно, на эффективность двигателей, и при невозможности преодоления препятствия путём набора высоты рекомендует экипажу уникальный манёвр «Уйди от земли» с использованием маневрирования и в горизонтальной плоскости.
2.2.1.Использование СНС (GNSS) для решения проблемы CFIT
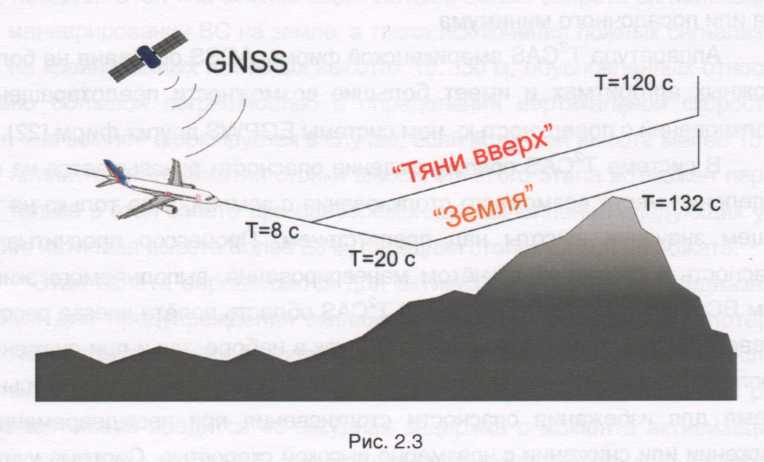
Спутниковая навигация является основой работы системы TAWS. Информация о текущем местоположении ВС, которую с достаточной точностью может предоставить спутниковая навигация, используется при работе системы для прогноза положения ВС. Использование GNSS и цифровой базы данных о подстилающей поверхности и препятствиях делает эту систему независимой от метеоусловий. В системе TAWS на основе данных бортовых систем ВС о вертикальной и путевой скоростях, об истинной высоте, путевом угле, пространственных координатах ВС, полученных по данным системы спутниковой навигации GNSS, постоянно вычисляется траектория полёта с упреждением более чем на 120 с. Эта траектория соотносится с заложенной в цифровой базе данных информацией о высотах подстилающей поверхности с разрешением 0,5 либо 3 NM при полётах ВС в районе аэродрома или по маршруту соответственно. При этом в вертикальной плоскости рассчитываются две области для оценки степени опасности столкновения с поверхностью земли (рис. 2.3).
|
Первая - это область заблаговременного предупреждения об угрозе возможного столкновения с землёй. Она распространяется вдоль линии пути от 20 до 132 с впереди ВС. Конкретное значение времени рассчитывается автоматически и зависит от высоты препятствия, этапа полёта и технических возможностей ВС по набору высоты в данных условиях полёта. При этом вырабатывается речевое сообщение «Земля». 20 с - это минимальное достаточное время для анализа изображения земной поверхности на специальном панорамном дисплее, реагирования экипажа и подготовки к набору высоты.
Вторая - это область высокой опасности столкновения с землёй. Она распространяется вдоль линии пути от 8 до 120 с впереди ВС. 8 с - это минимальное достаточное время для реагирования экипажа и экстренного набора безопасной высоты. При этом системой EGPWS вырабатывается
речевая команда «Pull up» (тяни вверх). В системе T2CAS производимый вычислителем расчёт, учитывающий направление полёта и способность ВС по набору высоты, может определить тот случай, когда оно не способно в оставшееся время набрать необходимую высоту. В этом случае системой T2CAS вырабатывается речевая команда «Avoid Terrain, Avoid Terrain» (уйди от земли). В данном случае экипаж набирает высоту с допустимой по руководству по производству полётов вертикальной скоростью и с обязательным поворотом в горизонтальной плоскости. Направление отворота экипаж планирует, используя изображение поверхности земли на панорамном дисплее.
В горизонтальной проекции для оценки степени угрозы столкновения с землёй вычислитель системы TAWS определяет пространство впереди ВС в форме узкого луча шириной 3° по направлению полёта ВС. Если ВС начинает разворот, то это расчётное пространство искривляется в направлении разворота вплоть до 90° относительно прежнего направления прямолинейного полёта.
Очевидно, что после внедрения данной системы и, конечно, в случае её грамотной эксплуатации количество авиационных катастроф, связанных с CFIT, может быть значительно сокращено [28].
2.2.2.Режимы работы системы EGPWS (TAWS)
Система EGPWS (TAWS) может работать в различных режимах (рис. 2.4). Рассмотрим каждый подробнее.

|
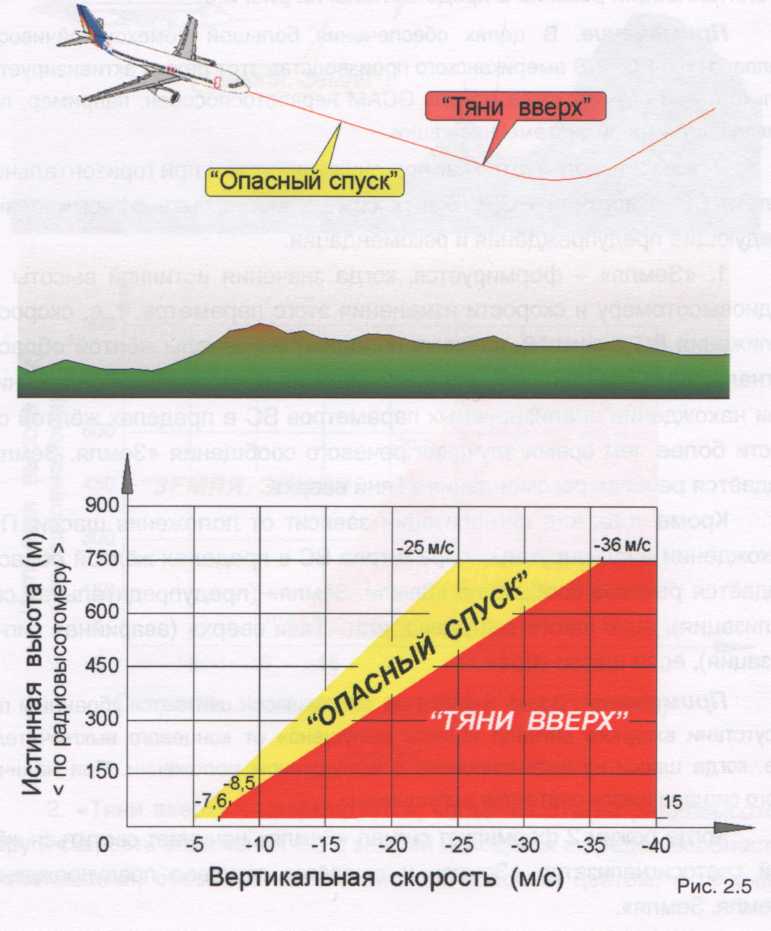
Режим 1 «Чрезмерная скорость снижения». Для функционирования режима используется информация об истинной высоте от радиовысотомера, о вертикальной скорости от системы воздушных сигналов, а также сигнал о включении режима крутого захода на посадку.
Режим становится активным после отрыва ВС от ВПП и набора высоты 30 м, действует в течение всего полёта и при снижении до высоты 15 м независимо от положения шасси и закрылков, если текущая траектория полёта близко от земли (в диапазоне работы радиовысотомера) характеризуется опасно большой скоростью снижения. Области сигнализации режима 1 представлены на рис. 2.5.
Примечание. В целях обеспечения большей помехоустойчивости в аппаратуре EGPWS американского производства этот режим активизируется только в том случае, когда модуль GCAM неработоспособен, например, при отказе спутниковой системы навигации.
Системой EGPWS в режиме 1 могут быть сформированы следующие предупреждения и рекомендации:
1. «Опасный спуск» - формируется, когда истинная высота по радиовысотомеру и вертикальная скорость находятся в пределах области срабатывания в течение как минимум 1 с. Когда формируется этот сигнал, начинает светиться жёлтый светосигнализатор «Земля» и выдаётся звуковое предупреждение «Опасный спуск». Если экипажем выбрана опция «крутой заход», область скорости снижения изменяется. Данная сигнализация снова готова к работе, как только значения истинной высоты и вертикальной скорости будут находиться за пределами области, обозначенной на рис. 2.5 жёлтым цветом.
2. «Тяни вверх» - формируется, когда высота по радиовысотомеру и вертикальная скорость находятся в пределах своей области срабатывания в течение как минимум, 0,5 с. Когда формируется этот сигнал, начинает светиться красный светосигнализатор «Опасно земля» и выдаётся звуковая рекомендация «Тяни вверх». Сигнализация «Тяни вверх» выдаётся до тех пор, пока указанные параметры полёта ВС находятся в пределах соответствующей области сигнализации.
При получении рекомендаций в этом режиме экипаж ВС должен немедленно прекратить снижение, оценить ситуацию относительно
поверхности земли - проконтролировать высоту и вертикальную скорость. При получении аварийной сигнализации «Тяни вверх» - отключить автопилот, перевести РУДы на взлётный режим, убрать крен, убрать шасси и спойлеры, установить закрылки и предкрылки во взлётное положение и выполнять набор высоты, выдерживая допустимую вертикальную скорость. После возврата в безопасную ситуацию экипаж должен проинформировать диспетчера УВД об изменении параметров полёта.
Режим 1. Чрезмерная скорость снижения
|
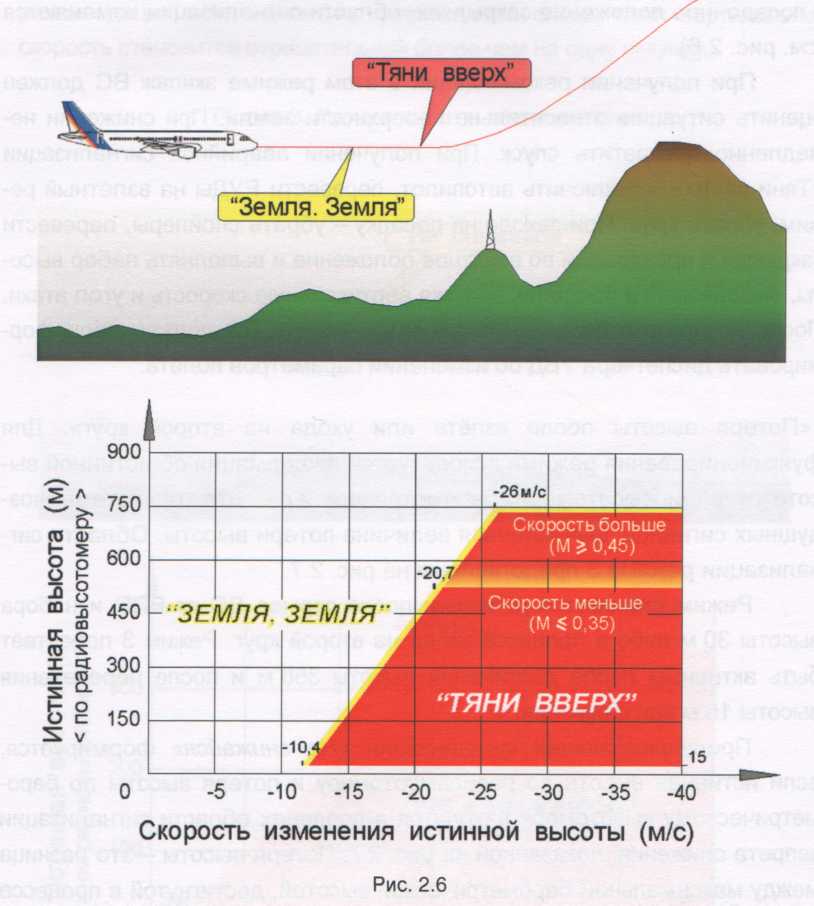
Режим 2 «Опасная скорость сближения с подстилающей поверхностью». Для функционирования режима используется информация об истинной высоте от радиовысотомера, о воздушной скорости от системы воздушных сигналов с учётом всех поправок. Используются также сигналы о выпуске шасси и закрылков в посадочное положение. Режим становится активным после отрыва ВС от ВПП и набора высоты 30 м, действует на всех этапах полёта при высоте свыше 15 м при убранном шасси в ситуациях, когда текущая траектория полёта и подстилающая земная поверхность сближаются с опасной чрезмерной скоростью. Области сигнализации режима 2 представлены на рис. 2.6.
Примечание. В целях обеспечения большей помехоустойчивости в аппаратуре EGPWS американского производства этот режим активизируется только в том случае, когда модуль GCAM неработоспособен, например, при отказе спутниковой системы навигации.
Режим 2 используется как при снижении, так и при горизонтальном полёте ВС. Системой EGPWS в режиме 2 могут быть сформированы следующие предупреждения и рекомендации.
1. «Земля» - формируется, когда значения истинной высоты по радиовысотомеру и скорости изменения этого параметра, т. е. скорости сближения ВС с землёй, впервые попадают в пределы жёлтой области сигнализации (см. рис. 2.6), если закрылки не в посадочном положении. При нахождении анализируемых параметров ВС в пределах жёлтой области более чем время звучания речевого сообщения «Земля. Земля» выдаётся речевая рекомендация «Тяни вверх».
Кроме того, вид сигнализации зависит от положения шасси. При нахождении анализируемых параметров ВС в пределах жёлтой области выдаётся речевое сообщение «Земля. Земля» (предупредительная сигнализация), если шасси выпущено, или «Тяни вверх» (аварийная сигнализация), если шасси убрано.
Примечание. Здесь и далее по тексту шасси считается убранным при отсутствии входного сигнала «Шасси выпущено» от концевого выключателя, т. е. когда шасси не зафиксировано в выпущенном положении. При наличии этого сигнала шасси считается выпущенным.
Когда режим 2 формирует сигнал «Земля» начинает светиться жёлтый светосигнализатор «Земля» и выдаётся звуковое предупреждение «Земля. Земля».
Данная сигнализация снова готова к работе, как только значения истинной высоты и вертикальной скорости будут находиться за пределами области, обозначенной на рис. 2.6 жёлтым или красным цветом.
Режим 2. Опасная скорость сближения с землёй
|
2. «Тяни вверх» - формируется, когда высота по радиовысотомеру и скорость сближения ВС с землёй находятся в пределах области срабатывания, обозначенной на рис. 2.6 красным цветом, в течение как минимум 3 с. Когда формируется этот сигнал, начинает светиться красный светосигнализатор «Опасно земля» и выдаётся звуковая рекомендация «Тяни вверх». Сигнализация «Тяни вверх» выдаётся до тех пор, пока указанные параметры полёта ВС находятся в пределах соответствующей области сигнализации.
При меньшей скорости полёта (М <0,35), т. е. при выпущенных в посадочное положение закрылках, области сигнализации изменяются (см. рис. 2.6).
При получении рекомендаций в этом режиме экипаж ВС должен оценить ситуацию относительно поверхности земли. При снижении немедленно прекратить спуск. При получении аварийной сигнализации «Тяни вверх» - отключить автопилот, перевести РУДы на взлётный режим, убрать крен. При заходе на посадку - убрать спойлеры, перевести закрылки и предкрылки во взлётное положение и выполнять набор высоты, выдерживая в пределах допуска вертикальную скорость и угол атаки. После возврата в безопасную ситуацию экипаж ВС должен проинформировать диспетчера УВД об изменении параметров полёта.
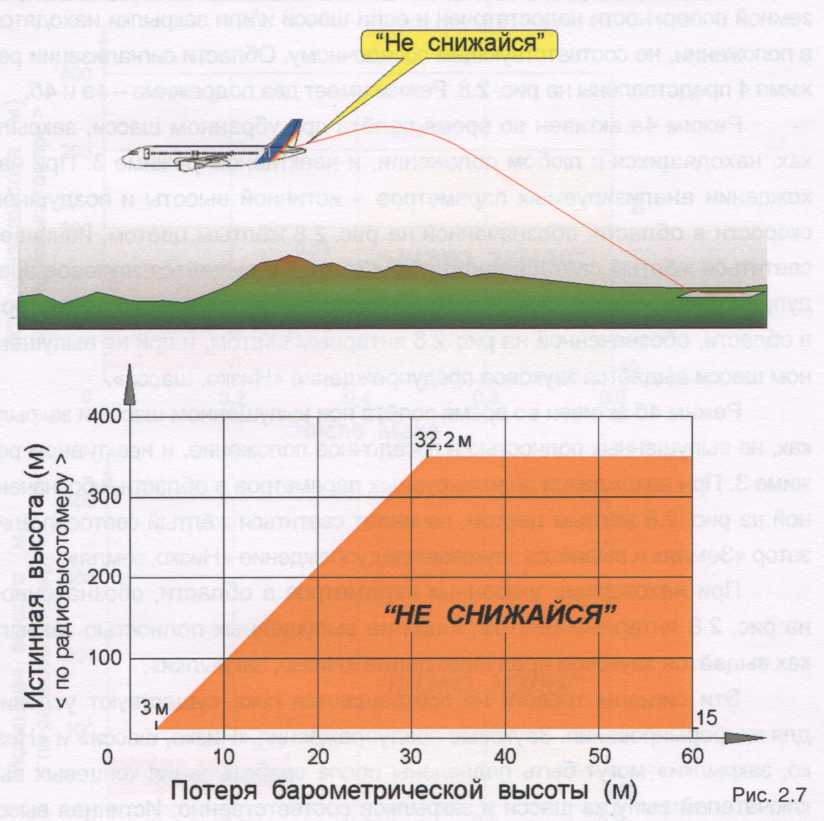
Режим 3 «Потеря высоты после взлёта или ухода на второй круг». Для функционирования режима используется информация об истинной высоте от радиовысотомера, барометрической высоте от системы воздушных сигналов, вычисленная величина потери высоты. Области сигнализации режима 3 представлены на рис. 2.7.
Режим становится активным после отрыва ВС от ВПП и набора высоты 30 м либо в процессе ухода на второй круг. Режим 3 перестаёт быть активным после достижения высоты 350 м и после пересечения высоты 15 м при снижении.
Предупреждающая сигнализация «Не снижайся» формируется, если истинная высота по радиовысотомеру и потеря высоты по барометрическому высотомеру находятся в пределах области сигнализации запрета снижения, показанной на рис. 2.7. Потеря высоты - это разница между максимальной барометрической высотой, достигнутой в процессе набора, и текущей высотой.
Когда режим 3 формирует сигнал «Не снижайся», начинает светиться жёлтый светосигнализатор «Земля» и выдаётся звуковая рекомендация «Не снижайся». Данная сигнализация снова готова к работе, как только радиовысота и высота по барометрическому высотомеру окажутся вне области сигнализации режима 3 или вертикальная скорость будет положительной более чем одну секунду, несмотря на то, что радиовысота и потеря высоты по барометрическому высотомеру могут ещё находиться в пределах своей области. После восстановления режима полёта, пока истинная высота и потеря высоты находятся в пределах данной области, рекомендация «Не снижайся» формируется снова, если вертикальная скорость становится отрицательной более чем на одну секунду.
Режим 3. Потеря высоты после взлёта
|
При получении рекомендаций в этом режиме экипаж ВС должен проконтролировать вертикальную скорость, истинную высоту по радиовысотомеру и режим работы двигателей и незамедлительно восстановить требуемый режим набора высоты.
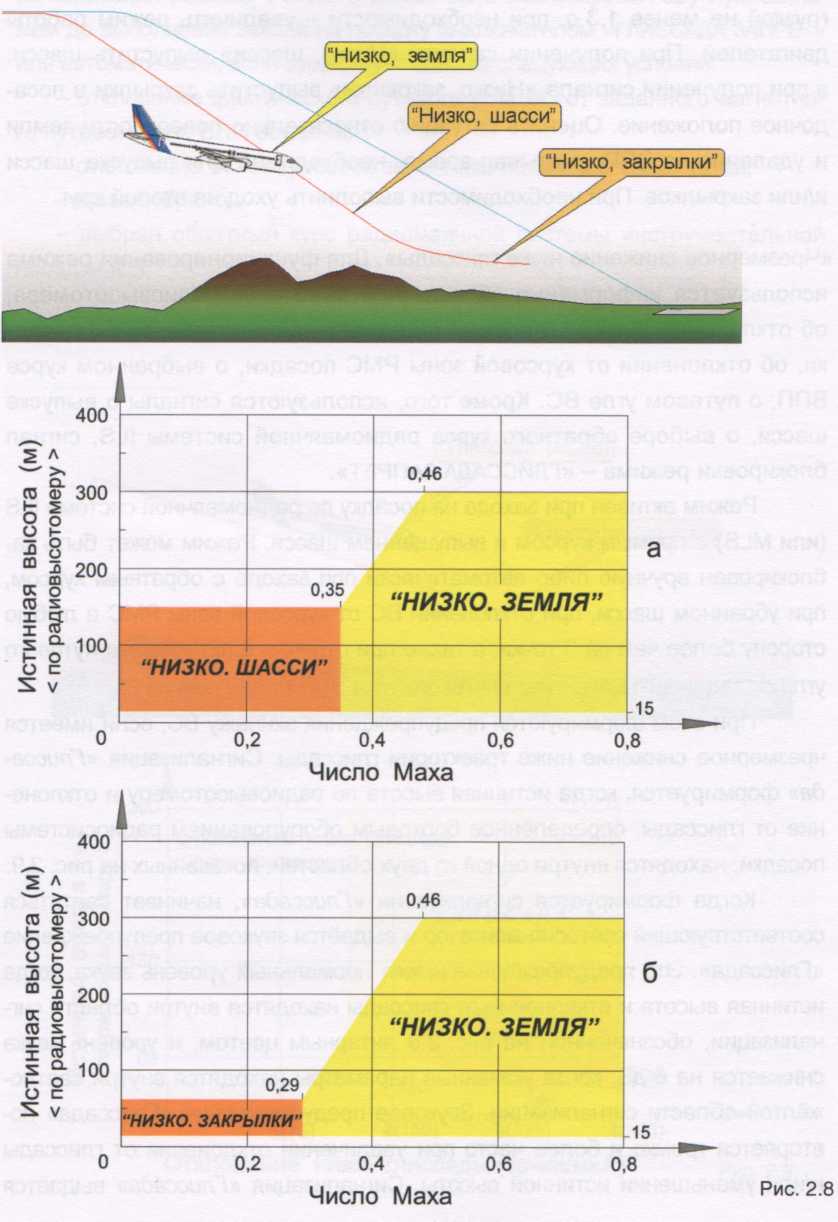
Режим 4 «Чрезмерное сближение с землёй; шасси и/или закрылки не выпущены».
Для функционирования режима используется информация об истинной высоте от радиовысотомера, о воздушной скорости от системы воздушных сигналов с учётом всех поправок, а также сигналы о выпуске шасси и закрылков в посадочное положение. Режим становится активным при снижении и предпосадочном маневрировании ВС. В этом режиме вырабатывается предупреждающая сигнализация, если запас высоты над рельефом земной поверхности недостаточен и если шасси и/или закрылки находятся в положении, не соответствующем посадочному. Области сигнализации режима 4 представлены на рис. 2.8. Режим имеет два подрежима - 4а и 46.
Режим 4а активен во время полёта при убранном шасси, закрылках, находящихся в любом положении, и неактивном режиме 3. При нахождении анализируемых параметров - истинной высоты и воздушной скорости в области, обозначенной на рис. 2.8 жёлтым цветом, начинает светиться жёлтый светосигнализатор «Земля» и выдаётся звуковое предупреждение «Низко, земля». При нахождении указанных параметров в области, обозначенной на рис. 2.8 янтарным цветом, и при не выпущенном шасси выдаётся звуковое предупреждение «Низко, шасси».
Режим 46 активен во время полёта при выпущенном шасси и закрылках, не выпущенных полностью в посадочное положение, и неактивном режиме 3. При нахождении анализируемых параметров в области, обозначенной на рис. 2.8 жёлтым цветом, начинает светиться жёлтый светосигнализатор «Земля» и выдаётся звуковое предупреждение «Низко, земля».
При нахождении указанных параметров в области, обозначенной на рис. 2.8 янтарным цветом, и при не выпущенных полностью закрылках выдаётся звуковое предупреждение «Низко, закрылки».
Эти сигналы тревоги не прекращаются пока существуют условия для их формирования. Звуковые предупреждения «Низко, шасси» и «Низко, закрылки» могут быть подавлены после срабатывания концевых выключателей выпуска шасси и закрылков соответственно. Истинная высота, на которой запрещается сигнализация при снижении ВС, равна 15 м.
Режим 4. Чрезмерное сближение с землёй; шасси и/или закрылки не выпущены
|
При получении предупреждений в этом режиме экипаж ВС должен незамедлительно прекратить снижение, выводя ВС из снижения с перегрузкой не менее 1,3 д, при необходимости - увеличить режим работы двигателей. При получении сигнала «Низко, шасси» выпустить шасси, а при получении сигнала «Низко, закрылки» выпустить закрылки в посадочное положение. Оценить ситуацию относительно поверхности земли и удаление от ВПП, учитывая время, необходимое для выпуска шасси и/или закрылков. При необходимости выполнить уход на второй круг.
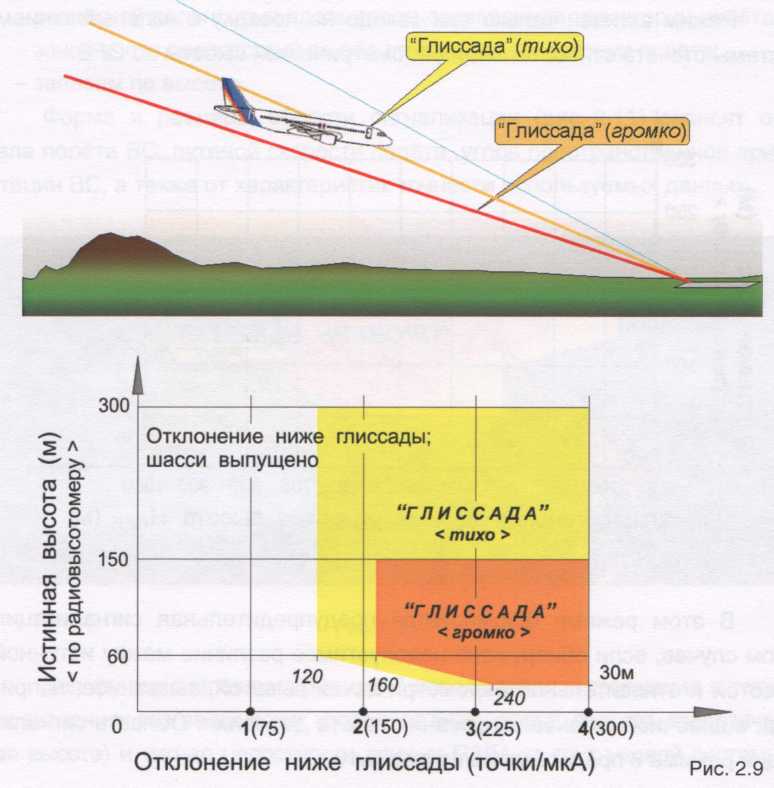
Режим 5 «Чрезмерное снижение ниже глиссады». Для функционирования режима используется информация об истинной высоте от радиовысотомера, об отклонении вниз от глиссады радиомаячной системы (РМС) посадки, об отклонении от курсовой зоны РМС посадки, о выбранном курсе ВПП, о путевом угле ВС. Кроме того, используются сигналы о выпуске шасси, о выборе обратного курса радиомаячной системы ILS, сигнал блокировки режима - «ГЛИССАДА ЗАПРЕТ».
Режим активен при заходе на посадку по радиомаячной системе ILS (или MLS) с прямым курсом и выпущенном шасси. Режим может быть заблокирован вручную либо автоматически при заходе с обратным курсом, при убранном шасси, при отклонении ВС от курсовой зоны РМС в любую сторону более чем на 3 точки, а также при отличии фактического путевого угла от заданного магнитного путевого угла ВПП более чем на 90°.
При этом формируются предупреждения экипажу ВС, если имеется чрезмерное снижение ниже траектории глиссады. Сигнализация «Глиссада» формируется, когда истинная высота по радиовысотомеру и отклонение от глиссады, определённое бортовым оборудованием радиосистемы посадки, находятся внутри одной из двух областей, показанных на рис. 2.9.
Когда формируется сигнализация «Глиссада», начинает светиться соответствующий светосигнализатор и выдаётся звуковое предупреждение «Глиссада». Это предупреждение имеет нормальный уровень звука, когда истинная высота и отклонение от глиссады находятся внутри области сигнализации, обозначенной на рис. 2.9 янтарным цветом, и уровень звука снижается на 6 дБ, когда указанные параметры находятся внутри светложёлтой области сигнализации. Звуковое предупреждение «Глиссада» повторяется громко и более часто при увеличении отклонения от глиссады и/или уменьшении истинной высоты. Сигнализация «Глиссада» выдаётся до тех пор, пока эти параметры находятся внутри одной из двух областей сигнализации режима. Режим 5 может быть заблокирован вручную экипажем до выполнения захода на посадку выключателем «ГЛИССАДА ЗАПРЕТ» или автоматически, если существует одно из следующих условий:
- отклонение фактического путевого угла ВС от заданного магнитного путевого угла ВПП более 90°;
- отклонение ВС от курсовой зоны РМС более чем на ±3 точки;
- шасси убрано;
- выбран обратный курс радиомаячной системы инструментальной посадки ILS.
Режим 5. Чрезмерное снижение ниже глиссады
|
При получении предупреждений в этом режиме экипаж ВС должен незамедлительно восстановить режим снижения по глиссаде, для чего предпринять корректирующие действия по возврату ВС на линию глиссады. Необходимо также оценить ситуацию относительно поверхности земли (проконтролировать величину отклонения от глиссады, истинную высоту и вертикальную скорость), при малом значении высоты ВС и недопустимом отклонении от линии глиссады выполнить уход на второй круг.
Режим 6 «Проверка относительной барометрической высоты». Режим 6 реализован только в аппаратуре EGPWS отечественного производства. Для его функционирования используется информация об истинной высоте от радиовысотомера, относительная барометрическая высота, измеренная по атмосферному давлению на аэродроме (QFE), сигнал включения системы отсчёта барометрической высоты по QFE.
Режим активен только при заходе на посадку с использованием системы отсчёта относительной барометрической высоты по QFE.

|
В этом режиме формируется предупредительная сигнализация в том случае, если обнаружено недопустимое различие между истинной высотой и относительной барометрической высотой, вызванное, например, ошибочной установкой уровня отсчёта давления. Область сигнализации режима 6 представлена на рис. 2.10.
При нахождении анализируемых параметров в области, обозначенной на рис. 2.10 жёлтым цветом, начинает светиться жёлтый светосигнализатор «Земля» и выдаётся звуковое предупреждение «Проверь высоту».
При получении предупреждений в этом режиме экипаж ВС должен незамедлительно проверить правильность установки уровня атмосферного давления на аэродроме посадки - QFE. Оценить ситуацию относительно поверхности земли: проконтролировать истинную высоту ВС, вертикальную скорость и удаление от ВПП. При малом значении высоты и удаления выполнить уход на второй круг.
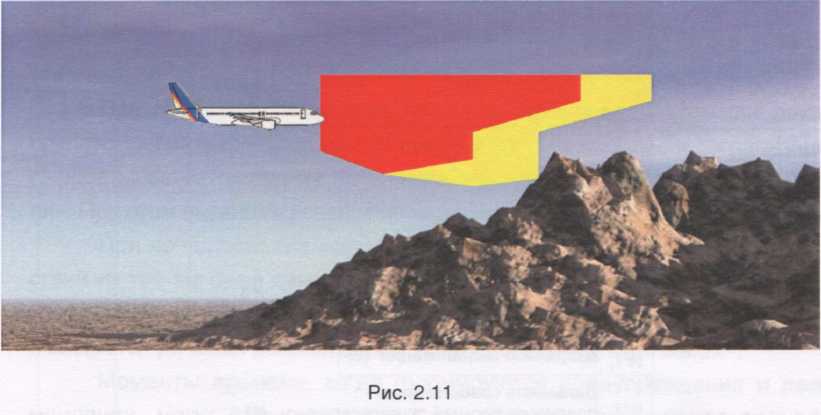
Режим 7 «Оценка рельефа местности в направлении полёта» используется для сравнения превышения элементов подстилающей поверхности земли и искусственных препятствий с высотой ВС в пределах области сигнализации, ограниченной:
- расчётной дальностью вдоль спрогнозированной траектории полёта;
- зоной учёта препятствий по обе стороны от траектории полёта;
- запасом по высоте.
Форма и размеры области сигнализации (рис. 2.11) зависят от этапа полёта ВС, путевой скорости полёта, углов пространственной ориентации ВС, а также от характеристик точности используемых данных.
|
Для функционирования режима 7 используется информация о текущих значениях географических координат ВС (широта, долгота, геодезическая высота) и сигнал целостности данных RAIM от спутниковой системы навигации GNSS. Используется также информация об истинной высоте от радиовысотомера, о путевой скорости, путевом угле, о вертикальном угле траектории, угле крена, о вертикальной скорости, а также о посадочной конфигурации ВС. Необходимым условием функционирования режима 7 является использование цифровых данных о рельефе земной поверхности и препятствиях в районе полёта. Некоторые модификации системы EGPWS используют информацию об аэродинамических характеристиках ВС, определяющих его скороподъёмность, информацию о текущем значении веса ВС, температуре наружного воздуха и наличии сигнала отказа двигателя.
Данные о превышении элементов подстилающей земной поверхности и искусственных препятствий берутся из регулярно обновляемой цифровой базы данных о подстилающей поверхности и искусственных препятствиях.
Режим активен на всех этапах полёта. Составная часть системы - модуль предупреждения столкновений с землёй GCAM реализует функцию оценки рельефа местности по направлению полёта. Он непрерывно определяет соотношение прогнозируемой траектории полёта ВС и рельефа земной поверхности, а также искусственных препятствий и заблаговременно выдаёт экипажу предупреждения о близости земли и рекомендации по уходу от столкновения, чаще всего путём набора высоты.
|
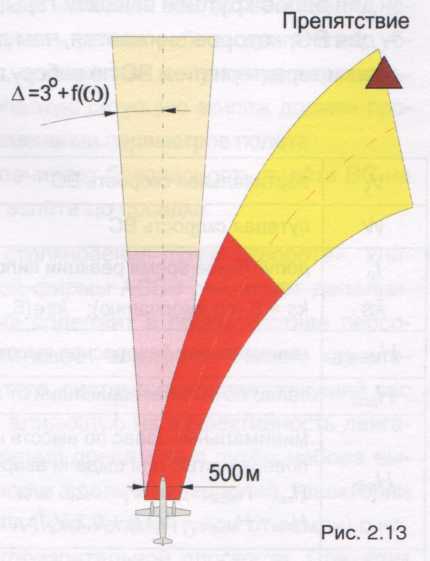
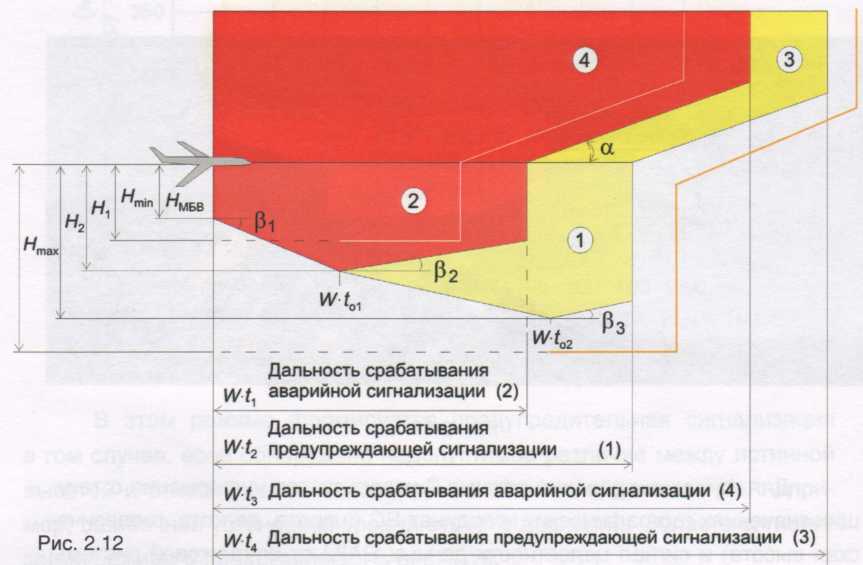
Как было сказано выше, в вычислительном устройстве системы в соответствии с перечисленными требованиями для режима 7 рассчитывается область сигнализации - «виртуальный бампер». Боковая проекция области сигнализации представлена на рис. 2.12, а вид сверху на рис 2.13.
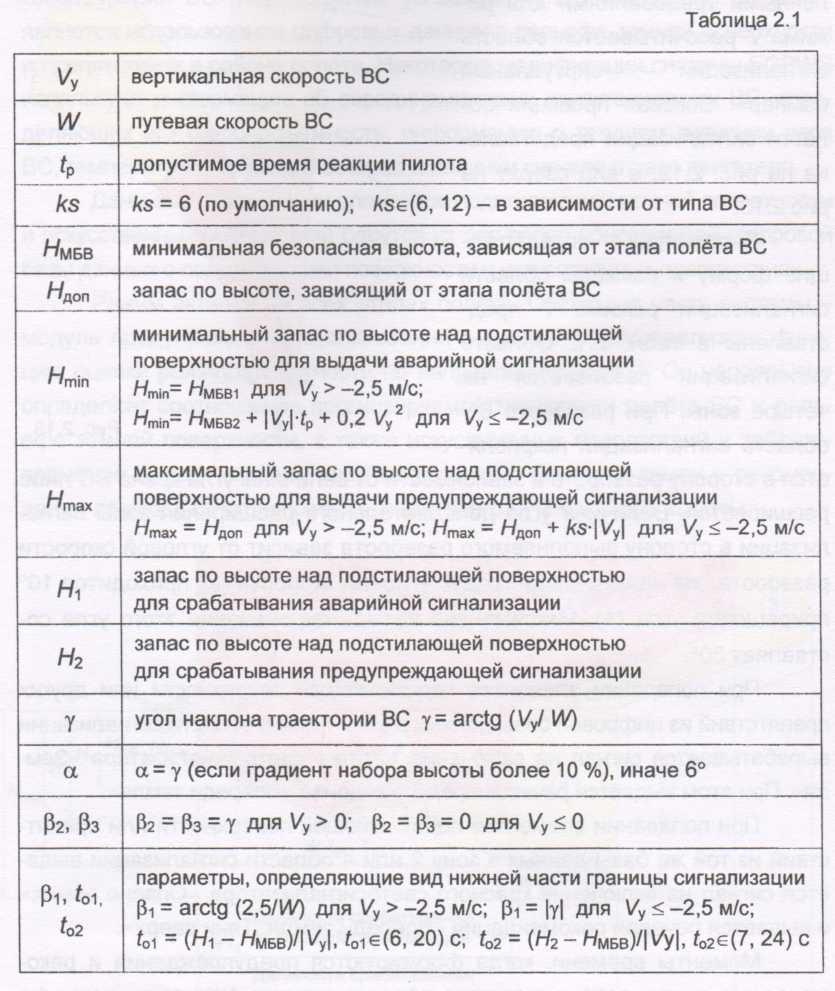
Параметры, определяющие форму и размеры области сигнализации режима 7 представлены в табл. 2.1. Область сигнализации разбивается на четыре зоны. При развороте ВС область сигнализации искривляется в сторону разворота в зависимости от величины угла крена ВС либо расширяется. Величина угла дополнительного расширения зоны сигнализации в сторону выполняемого разворота зависит от угловой скорости разворота. На каждый один градус угловой скорости (со) приходится 10° приращения угла (Д). Максимально возможное значение этого угла составляет 30°.
При попадании элементов подстилающей поверхности или других препятствий из цифровой базы данных в зону 1 или 3 области сигнализации вырабатывается сигнал на включение жёлтого светосигнализатора «Земля». При этом выдаётся речевое предупреждение «Впереди земля».
При попадании элементов подстилающей поверхности или препятствий из той же базы данных в зону 2 или 4 области сигнализации выдаётся сигнал на включение красного светосигнализатора «Опасно земля» и выдаётся речевая рекомендация «Впереди земля. Тяни вверх».
Моменты времени, когда формируются предупреждения и рекомендации, могут варьироваться в зависимости от характера рельефа земной поверхности, текущей траектории полёта и характеристик ВС, определяющих его возможности по набору высоты. Например, предупреждение будет формироваться раньше:
-для более крутой и высокой горы, чем для менее высокой;
-для ВС, которое снижается, чем для ВС, летящего горизонтально;
- если характеристики ВС по набору высоты ухудшились или ограничены.
|
Экипаж должен периодически (15...20 мин) контролировать положение ВС относительно рельефа земной поверхности. При получении предупреждений в режиме 7 «Впереди земля» экипаж должен при необходимости изменить траекторию полёта до прекращения сигнализации. При получении аварийной сигнализации и рекомендации «Впереди земля. Тяни вверх» необходимо отключить автопилот, увеличить режим работы двигателей, убрать крен и выполнять набор высоты, выдерживая допустимую вертикальную скорость. После возврата в безопасную ситуацию экипаж должен проинформировать диспетчера УВД об изменении параметров полёта.
Таким образом, режим 7 обеспечивает безопасность полёта ВС на протяжении всех этапов полёта - от взлёта до посадки.
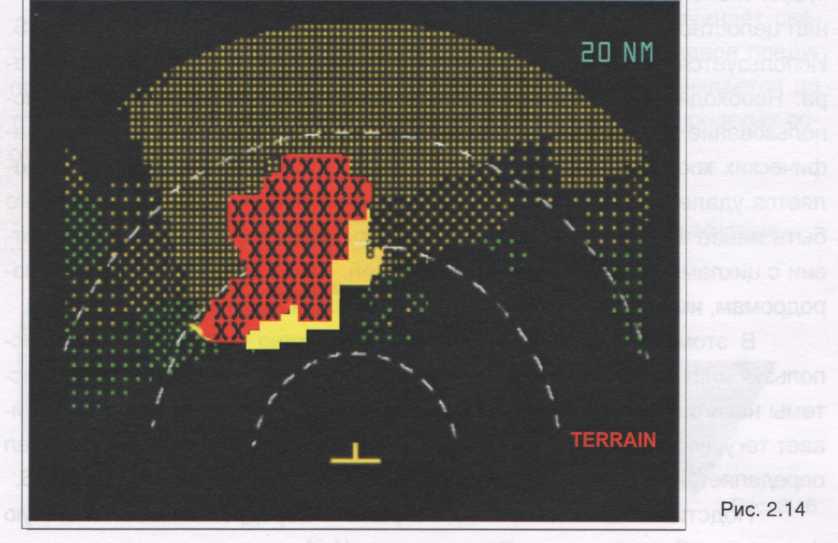
Режим 7 «Рекомендация по уходу от столкновения путём отворота». Уникальная система T2CAS американской фирмы ACSS реализует дополнительные возможности режима 7. Она содержит в своём составе персональный модуль памяти, который учитывает аэродинамические характеристики конкретного типа ВС. Кроме того, система учитывает текущий вес ВС, температуру наружного воздуха, влияющую на эффективность двигателей, и при невозможности преодоления препятствия путём набора высоты с необходимым запасом по высоте вдоль направления траектории полёта рекомендует экипажу манёвр «Avoid Terrain» (уйди от земли) с использованием маневрирования и в горизонтальной плоскости. При этом выдаётся речевая команда «Avoid Terrain». Направление манёвра (влево или вправо) определяет сам пилот в соответствии с цветным изображением подстилающей поверхности на дисплее (рис. 2.14).
|
Рельеф, который является причиной сигнализации «Avoid Terrain», индицируется на дисплее красным цветом с чёрными крестами. Направление манёвра должно быть противоположным расположению областей рельефа, окрашенных в красный цвет (в данном примере рекомендуется отворот вправо). Пока существуют условия для сигнализации «Avoid Terrain», рельеф, который является причиной этой сигнализации, остаётся представленным на дисплее красным цветом с чёрными крестами. Эта область может изменяться в зависимости от изменений траектории полёта ВС и изменений рельефа земной поверхности.
Эти возможности системы значительно повысят безопасность полётов в сложных метеоусловиях при снижении скороподъёмности ВС и большой крутизне нарастания рельефа земли.
Режим 8 «Преждевременное снижение в районе аэродрома при заходе без РМС».
Этот режим используется для сравнения превышения элементов подстилающей поверхности земли и искусственных препятствий с высотой ВС в пределах аэродромной зоны. Он активен при снижении и заходе на посадку без использования точных радиомаячных систем посадки независимо от конфигурации ВС.
Для функционирования режима 8 используется информация о текущих значениях географических координат ВС (широта, долгота) и сигнал целостности данных RAIM от спутниковой системы навигации GNSS. Используется также информация об истинной высоте от радиовысотомера. Необходимым условием функционирования режима 8 является использование цифровых данных о ВПП - их длине, превышении, географических координатах контрольной точки. По этой информации определяется удаление ВС от центра ВПП. Максимальное удаление не должно быть менее 40 км. База данных по аэродромам обновляется в соответствии с циклами AIREC, т. е. каждые 28 дней. База содержит данные по аэродромам, имеющим ВПП с твёрдым покрытием и длиной более 1150 м.
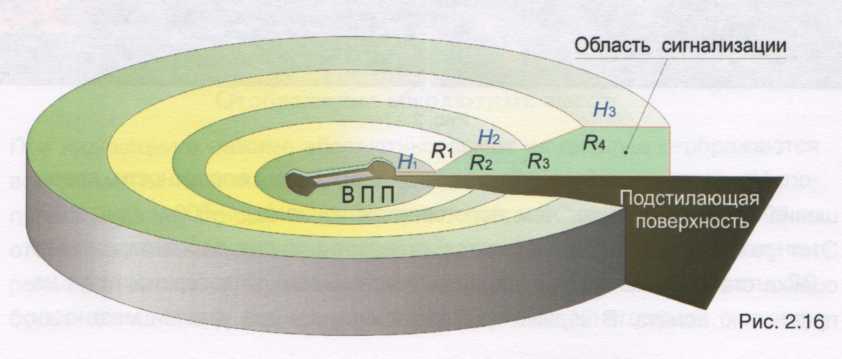
В этом режиме вычислительное устройство системы EGPWS, используя информацию о текущем местоположении ВС от спутниковой системы навигации и отсчёты истинной высоты от радиовысотомера, сравнивает текущую высоту с минимальным допустимым пределом. Этот предел определяется областью сигнализации, представленной на рис. 2.15 и 2.16.
Подстилающая поверхность в районе аэродрома имеет сложную форму, особенно в горной местности. Информация о превышениях элементов подстилающей поверхности и искусственных препятствий, а также их расположении относительно ВПП содержится в базе цифровых данных и может быть использована вычислительным устройством системы EGPWS. Таким образом, создаётся виртуальная защитная область вокруг каждой ВПП, что эффективно дополняет режим 4 и для ВС, находящихся в посадочной конфигурации.

|
Когда режим 8 формирует сигнал «Низко, земля», начинает светиться жёлтый светосигнализатор «Земля» и выдаётся звуковое предупреждение «Низко, земля». Сигнализация «Низко, земля» выдаётся до тех пор, пока указанные параметры полёта ВС находятся в пределах соответствующей области сигнализации.
|
При получении предупреждений в этом режиме экипаж должен немедленно прекратить снижение, выводя ВС из снижения с перегрузкой не менее 1,3 д, при необходимости увеличить режим работы двигателей. Оценить ситуацию относительно поверхности земли - проконтролировать истинную высоту и вертикальную скорость. После возврата в безопасную ситуацию экипаж должен проинформировать диспетчера УВД об изменении параметров полёта.
Дата добавления: 2016-01-03; просмотров: 12761;