Связь с другими системами ВС
Система EGPWS (TAWS) связана со многими устройствами и системами ВС (рис. 2.29). На различных этапах полёта в вычислителе системы используются данные от следующих основных устройств:
1) от приёмовычислителя системы спутниковой навигации GNSS:
- географическая широта текущего местоположения ВС;
- географическая долгота текущего местоположения ВС;
Примечание. Максимальное приемлемое значение погрешности географических координат составляет 0,93 км (0,5 NM) на этапе посадки, 1,852 км (1 NM) в районе аэродрома и 3,7 км (2 NM) вне аэродромной зоны;
- геометрическая высота ВС над референц-эллипсоидом - моделью Земли Всемирной геодезической системы WGS-84. Максимальное приемлемое значение погрешности составляет 100 м;
- параметр точности функционирования системы спутниковой навигации (GNSS), оцениваемый встроенной функцией RAIM. Максимальное приемлемое значение погрешности составляет 100 м для HDOP=1,5 (Horizontal Delution of Presision);
2) от системы автоматизированного управления полётом (ВСС) для подачи информации о путевой скорости, истинном путевом угле, угле наклона траектории;
3) от гироскопических датчиков пространственного положения ВС относительно плоскости горизонта (от курсовертикали) для подачи информации об угле крена;
4) от системы воздушных сигналов:
- исправленная воздушная скорость, вычисленная с учётом инструментальных и аэродинамических поправок. Допустимой погрешностью является 9 км/ч при скорости до 100 км/ч, 3,7 км/ч при скорости до 370 км/ч и 7,4 км/ч при скорости до 834 км/ч;
- высота от барометрического высотомера;
- вертикальная скорость;
5) от радиотехнической системы посадки по приборам ILS или MLS - аналоговые сигналы в виде напряжений, пропорциональных отклонениям ВС от равносигнальных зон курса и глиссады радиомаячной системы посадки ILS, а в перспективе MLS, сигналы готовности курса и глиссады, а также сигналы, пропорциональные выбранному курсу посадки с допустимой погрешностью 2°;
6) от радиовысотомера - аналоговый сигнал в виде постоянного напряжения, пропорционального истинной высоте ВС над рельефом земной поверхности в рабочем диапазоне радиовысотомера, и дискретный сигнал (+27 В) о его исправности. Приемлемой является погрешность
1 м (или 4 %) в пределах 0...150 м и 5 % - свыше 150 м;
7) от сигнализаторов положения стоек шасси и закрылков, в частности от:
- концевого выключателя выпуска закрылков в посадочное положение для подачи в процессор EGPWS дискретного сигнала (+27 В);
- концевого выключателя обжатого положения передней стойки шасси (ВС на земле) для подачи в процессор EGPWS дискретного сигнала (+27 В);
- концевого выключателя выпуска шасси (обычно левая стойка) в посадочное положение для подачи в процессор EGPWS дискретного сигнала (+27 В);
8) от автомата угла атаки и сигнализации перегрузки (АУАСП) для кратковременной приостановки функционирования системы EGPWS в случае возникновения угрозы сваливания ВС;
9) от датчика температуры наружного воздуха для учёта изменений эффективности работы двигателей, вызванных изменением температуры. Максимальное приемлемое значение погрешности составляет 4,5 °С;
10) от датчиков центровки и расхода топлива для получения информации о текущем значении веса ВС при учёте его скороподъёмности. Максимальное приемлемое значение погрешности составляет 100 кг.
При установке системы EGPWS на отечественные ВС, оборудованные аналоговыми системами, для функционирования цифрового вычислителя необходимо включение универсального блока сопряжения, в котором производится аналого-цифровое преобразование информации (это устройство на схеме рис. 2.29 не показано).
Вычислитель системы EGPWS связан с системой TCAS II. При обнаружении угрозы столкновения с землёй и выдаче звуковых и световых рекомендаций в систему TCAS II подаётся сигнал для её переключения в режим «ТА ONLY», при котором эта система не выдаёт каких-либо рекомендаций и звуковых сообщений. Этим достигается приоритет системы EGPWS.
Вычислитель системы EGPWS подаёт сигнал отказа и сигналы, соответствующие выданным аварийным рекомендациям, для их записи в аппаратуре регистрации полётной информации МСРП.
Речевые сообщения и рекомендации система EGPWS воспроизводит через самолётное переговорное (СПУ) и громкоговорящее (СГУ) устройства. 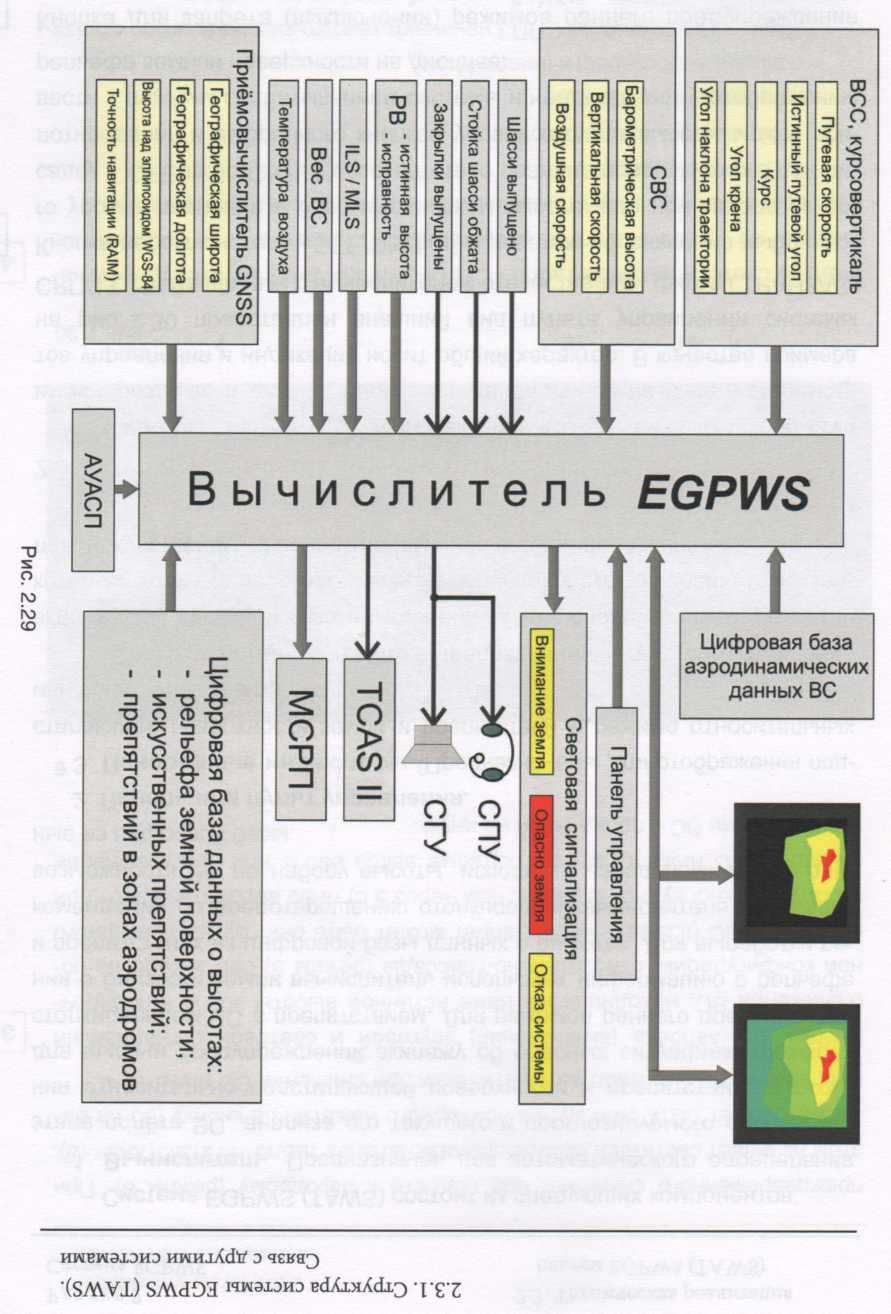
3. Панорамные индикаторы. Предназначены для отображения подстилающей поверхности земли и препятствий в режиме относительных или абсолютных высот (см. рис. 2.17, 2.19).
4. Светосигнальные табло. Предназначены для представления экипажу ВС сигналов о возникновении таких условий полёта, развитие которых может привести к непреднамеренному столкновению ВС с землёй, искусственными препятствиями или водной поверхностью.
Дата добавления: 2016-01-03; просмотров: 2222;