ЭЛЕКТРОДИНАМИЧЕСКИЕ (ЭД) ПРИБОРЫ
4.3.1. Области применения и свойства приборов
Электродинамические приборы применяют в качестве:
1) ваттметров постоянного и переменного токов (ваттметры переменного тока делятся на: однофазные, трехфазные и мало косинусные);
2) амперметров и вольтметров переменного тока и реже – постоянного;
3) фазометров (однофазных и трехфазных);
4) частотомеров;
5) фарадомеров.
Характерной особенностью электродинамических приборов является возможность их исполнения с высоким классом точности. Так, в настоящее время выпускаются электродинамические амперметры, миллиамперметры, вольтметры и однофазные ваттметры класса точности 0,05; фазометры – класса 0,1; частотомеры и различного типа ваттметры класса – 0,5. Как правило, точность сохраняется при переходе с постоянного тока на переменный, что позволяет выполнять градуировку на постоянном токе.
Высокая точность электродинамических приборов объясняется тем, что электродинамические ИМ не содержат ферромагнитных или других нелинейных элементов, наличие которых вызывает трудно компенсируемые погрешности. Погрешности, вносимые магнитным экраном (для экранированных приборов), можно свести до ничтожно малых величин правильным проектированием экрана. Показания электродинамических приборов отличаются также высокой стабильностью во времени. Высокая точность этой группы приборов позволяет использовать их в качестве образцовых при градуировке и проверке приборов других систем на переменном токе. Частотный диапазон применения электродинамических приборов достигает (в расширенной области частот) для амперметров 10 кГц, для вольтметров и ваттметров – 5 кГц. Ваттметры имеют практически равномерную шкалу, амперметры и вольтметры – равномерную шкалу, начиная приблизительно с 15 – 20% ее номинального значения.
По чувствительности электродинамические приборы уступают магнитоэлектрическим. Однако применение растяжек и светового указателя позволило улучшить этот параметр. Так, имеются миллиамперметры с током полного отклонения iн = 1 мА (чаще всего iн для этих приборов составляет 3 – 5 мА, а для приборов с установкой подвижной части на кернах iн = 25 – 30 мА).
В основном электродинамические приборы применяют в качестве самых разнообразных ваттметров, а также высокоточных амперметров и вольтметров. Выпускают и комбинированные электродинамические приборы – ампервольтваттметры.
4.3.2. Измерительные механизмы электродинамических приборов
Электродинамические им состоят из системы неподвижных и подвижных катушек (рамок), стойки, упругих элементов, успокоителя, отсчетного устройства, средств магнитной защиты.
Катушки применяют круглые или прямоугольные. Круглые проще в производстве и дают по сравнению с прямоугольными увеличение коэффициента добротности (и, следовательно, чувствительности) на 15 – 20%. Прямоугольные применяют для уменьшения размера прибора по вертикали, например в астатических приборах и многофазных (многоэлементных) ваттметрах.
Неподвижные катушки обычно выполняют из двух половин (секций). Это удобнее конструктивно (можно пропустить ось) и можно, изменяя расстояние между катушками, менять конфигурацию магнитного поля, что требуется для улучшения шкалы прибора. Для обмоток неподвижных катушек всегда применяют медный провод, а для подвижных – медный или алюминиевый. Подвижные катушки размещают внутри неподвижных.
При проектировании электродинамических им надо исключить возможность резонанса, который имеет место при совпадении собственной частоты колебаний подвижной части и вынужденной частоты изменения вращающего момента.
В электродинамических приборах, как правило, применяют меры для защиты от влияния внешних магнитных полей, так как их собственное поле мало и влияние внешних магнитных полей может быть весьма существенным. Магнитную защиту чаще всего обеспечивают, применяя магнитные экраны или реже – астатические им.
При наличии магнитного экрана применяют магнитоиндукционные, без экрана – воздушные успокоители.
При больших значениях номинального тока (десятки миллиампер) им должен быть сконструирован с учетом необходимости хорошего теплоотвода.
На рисунке 4.13 в качестве примера приведена широко применяемая конструкция электродинамического им. Основные детали этой конструкции и их особенности следующие.
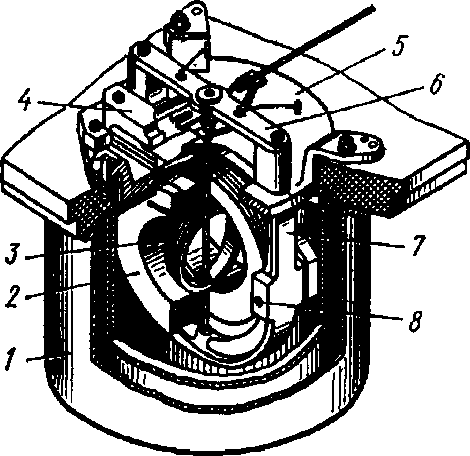
Рис. 4.13. Экранированный электродинамический измерительный
механизм с круглыми катушками
Стойка состоит из трех частей: литого (бронза) основания 5, литого кронштейна 7 и штампованного мостика 6. Кронштейн во избежание образования короткозамкнутого витка изолирован от основания. На внутренней плоскости основания укреплена крышка магнитного экрана. Резьбовые отверстия 8 на приливах кронштейна служат для крепления неподвижных катушек 2, намотанных на пластмассовый каркас.
Подвижная часть 3 состоит из круглой катушки (рамки) со сквозной осью, оканчивающейся кернами, стрелкодержателя со стрелкой, двух пружинодержателей, к которым припаяны концы пружинок (один из пружинодержателей изолирован от оси изоляционной втулкой), и сектора магнитоиндукционного успокоителя. К отросткам пружинодержателей припаивают концы обмотки рамки. Успокоитель – магнитоиндукционный. Магниты 4 успокоителя укреплены на основании стойки. Магнитный экран 1 – двойной, выполнен из пермаллоя.
4.3.3. Вращающий момент. Методика расчета
Выражение для вращающего момента имеет вид
 , (4.54) где I1 и I2 – токи в цепях неподвижных и подвижных катушек;
, (4.54) где I1 и I2 – токи в цепях неподвижных и подвижных катушек;
М1,2 – взаимная индуктивность между катушками.
Формула (4.54) справедлива для цепи постоянного тока и для определения мгновенного значения момента при включении прибора в цепь переменного тока. Так как
Ð(Ф1, Ф2) » Ð(I1, I2), (4.55)
вследствие большого момента инерции подвижной части отклонение определяется средним значением момента за период.
Так как в общем случае магнитное поле не однородно, получить аналитическое выражение для взаимной индуктивности не просто, особенно для катушек прямоугольной формы.
Однако существует ряд формул и номограмм для подсчета вращающего момента катушек разной формы и разной конфигурации магнитного поля.
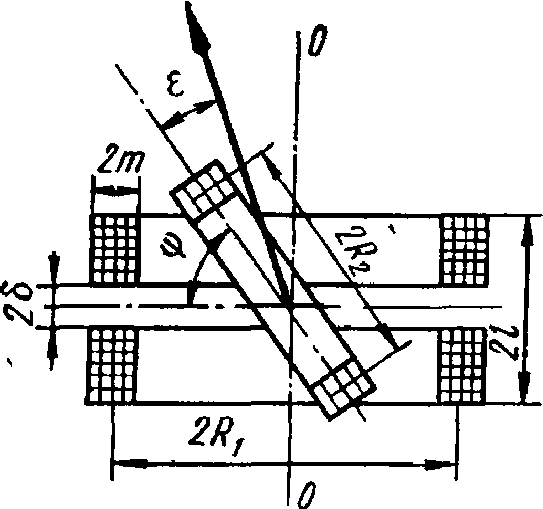
Рис. 4.14. Разрез катушек электродинамического механизма
На рисунке 4.14 показаны в разрезе катушки электродинамического ИМ. Здесь r1 и r2 – средние радиусы соответственно неподвижной и подвижной катушек;
y – угол между плоскостями подвижной и неподвижной катушек, начальное значение y (при угле отклонения a = 0) составляет 45° – e, а конечное (при a = 90°) – e ;
e – угол смещения стрелки с плоскости подвижной катушки, обычно равный 10–15°.
Сдвиг стрелки на угол e относительно плоскости подвижной катушки позволяет выбрать рабочий участок на кривой зависимости Мвр = ¦(y) или Мвр = ¦(a). Нетрудно видеть, что взаимном расположении катушек и стрелки и указанных значениях углов a = y – 45° + e.
Если размеры неподвижных катушек и их расположение относительно подвижной выбрать таким образом, чтобы последняя находилась в равномерном поле, то
 , (4.56)
, (4.56)
Где n1 и n2 – числа витков неподвижных и подвижных катушек соответственно.
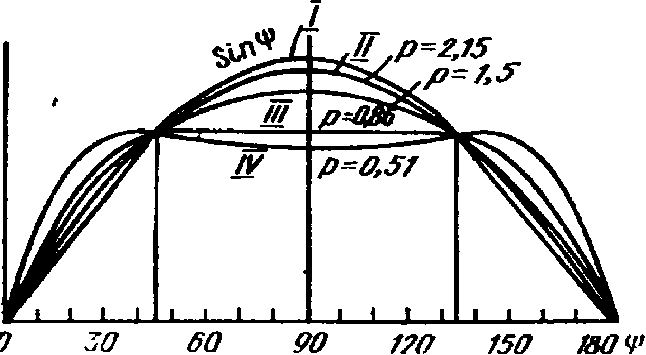
Рис. 4.15. Зависимости Мвр = f(y) электродинамического измерительного
механизма при разных значениях р = l / r2
Отсюда следует, что Мвр является синусоидальной функцией y (кривая i на рис.4.15). Меняя отношение p = l / r2, можно изменять характер зависимости Мвр = так, при р » 0,86 в этой зависимости образуется участок протяженностью » 90° (от y = 45° до y = 135°), на котором Мвр = const (кривая iii на рис. 4.15). В этом случае
 , (4.57)
, (4.57)
Где А0 – коэффициент, который можно найти из кривой на рис. 4.16 в зависимости от отношения половины толщины намотки m к радиусу неподвижной катушки r1, если вычислить при этом x равную
 . (4.58)
. (4.58)
В зависимости от рода измеряемой прибором величины выбирают разный характер зависимости Мвр = ¦(y) и разные рабочие участки Мвр = ¦(a). Так, для амперметров и вольтметров независимо от схемы включения обмоток неподвижных и подвижных катушек (последовательно или параллельно) момент Мвр и угол отклонения a пропорциональны квадрату измеряемой величины (току или напряжению).
Для улучшения характера шкалы (приближения ее к равномерной) необходимо, чтобы множитель dм1,2 /da при возрастании a убывал. Наилучшим образом это требование удовлетворяется, если обеспечить синусоидальный закон измерения Мвр и работать на ниспадающем участке синусоиды. Для ваттметров Мвр и a пропорциональны (при соблюдении ряда дополнительных условий) измеряемой величине (мощности). Следовательно, для получения равномерной шкалы надо, чтобы момент не зависел от угла отклонения. Этому соответствует кривая iii (см. Рис. 4.15) на участке 45° < y < 135°. Более тщательное изучение этого вопроса показывает, что рабочий участок, на котором выполняется поставленное требование, несколько меньше 90°. Поэтому для ваттметров стрелку сдвигают влево относительно плоскости подвижной рамки на угол e, тогда на этом участке в начале шкалы будет иметь место неравномерность, а далее шкала будет равномерной. С той же целью у амперметров и вольтметров стрелку сдвигают на угол e вправо.
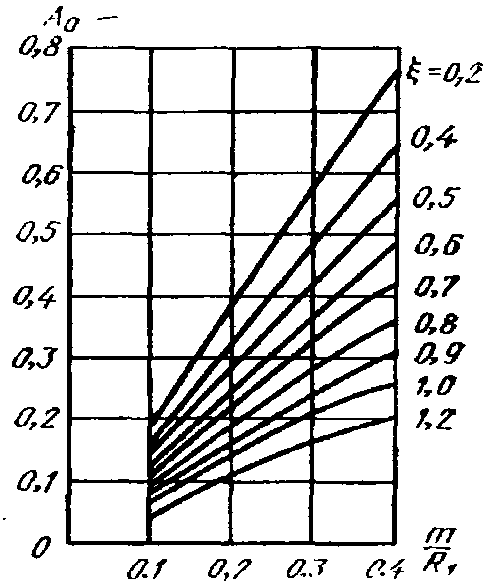
Рис. 4.16. Кривые для определения коэффициента а0
Дальнейшее рассмотрение электродинамических приборов приведено применительно к ваттметрам, наиболее важной группе этих приборов.
4.3.4. Измерительные цепи. Погрешности ваттметра
Измерительные цепи электродинамических ваттметров зависят от количества пределов измерений по току и напряжению, а также от необходимости компенсации погрешностей, прежде всего температурной и частотной. В простейшем случае цепь напряжения (параллельная) состоит из цепи подвижной рамки и последовательно соединенного с ней добавочного сопротивления, а токовая (последовательная) – из обмоток неподвижных катушек (рис. 4.17).
* r0
* I1
I2
U i2 rнаг
rд
Рис. 4.17. Простейшая измерительная цепь электродинамического ваттметра
Расширение пределов измерения по напряжению достигается включением различных добавочных сопротивлений, а по току – секционированием токовых катушек и переключением отдельных секций в определенных комбинациях аналогично тому, как это делают в электромагнитных приборах. Для расширения пределов применяют также измерительные трансформаторы, часто встраиваемые внутрь прибора.
Температурная погрешность gt ваттметра. Эта погрешность возникает вследствие изменения сопротивления r0 обмотки рамки и изменения упругих свойств пружинок или растяжек.
Условие температурной компенсации (gt = 0) можно представить следующим образом:
 , (4.59)
, (4.59)
Где b0 – температурный коэффициент электрического сопротивления материала провода обмотки рамки;
bw – температурный коэффициент упругости пружинок или растяжек;
rд – добавочное сопротивление (bд = 0).
Из формулы (4.59) видно, что полная компенсация для прибора данной конструкции возможна только для одного предела измерения. При малых rд (на пределах измерения в несколько десятков вольт)  и, следовательно, погрешность изменением сопротивления обмотки рамки; при больших пределах измерения
и, следовательно, погрешность изменением сопротивления обмотки рамки; при больших пределах измерения  и, следовательно, gt определяется изменением упругих свойств пружинок. Это значит, что при возрастании температуры на малых пределах показания уменьшаются, а на больших – увеличиваются.
и, следовательно, gt определяется изменением упругих свойств пружинок. Это значит, что при возрастании температуры на малых пределах показания уменьшаются, а на больших – увеличиваются.
Для улучшения компенсации gt применяют специальные схемы, например схему рис. 4.18. (емкость с, обозначенная на рис. 4.18, требуется для компенсации частотной погрешности).
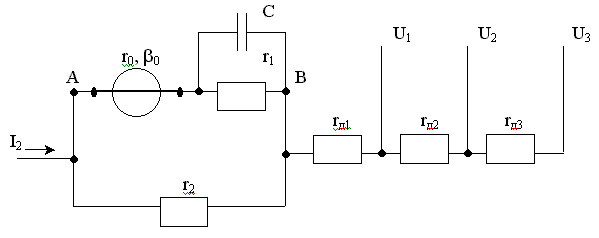
Рис. 4.18. Измерительная цепь электродинамического ваттметра
с компенсацией температурной и частотной погрешности
Все сопротивления в схеме, кроме r0, выполнены из манганина (b = 0). Получение выражения для gt производится на основании рассуждений, аналогичных приведенным ранее:
 , (4.60)
, (4.60)
Где rд – добавочное сопротивление на данном пределе измерения,
 , (4.61)
, (4.61)
 . (4.62)
. (4.62)
Из формулы (4.60) видно, что полная компенсация имеет место только на одном пределе (для одного значения rд и r). Однако при gt увеличении предела будет возрастать незначительно, так как при этом одновременно возрастают r и rд, а gt зависит от их отношения. Например, для ваттметра с параметрами r0 = 200 Ом; r1 = 200 Ом; r2 = 4000 Ом на пределе 150 в gt = – 0,03%; на пределе 300 в gt = + 0,04%; на пределе 600 в gt = + 0,07%.
Погрешность электродинамических ваттметров от изменения частоты gf. Эта погрешность вызывается следующими причинами:
А) изменением тока i2 в параллельной цепи ваттметра, вызванным зависимостью полного сопротивления этой цепи от частоты;
Б) изменением фазовых соотношений в параллельной цепи ваттметра (угловая погрешность);
В) возникновением ЭДС в подвижной катушке при пронизывании ее переменным магнитным полем неподвижных катушек (погрешность от взаимной индуктивности).
Рассмотрим каждую из составляющих частотной погрешности и способы их компенсации.
Погрешность от изменения тока i2 для реальных конструкций ваттметров составляет обычно сотые доли процента и ею можно пренебречь.
Угловую погрешность можно (с некоторым приближением) подсчитать по следующей формуле:
 , (4.63)
, (4.63)
где d – угол между напряжением u и током i2 в параллельной цепи, рад.
Из выражения (4.63) видно, что gd зависит от характера нагрузки. Необходимо также учесть, что при изменении частоты изменяется d. В большинстве случаев принимают специальные меры для компенсации gd .
Основным способом компенсации угловой погрешности является включение в параллельную цепь последовательно с обмоткой рамки конденсатора емкостью с (рис. 4.18). Для компенсации надо, чтобы Zав было чисто активным, т.е мнимая составляющая сопротивления равнялась нулю. При выполнении этого условия значение емкости компенсирующего конденсатора
 , (4.64)
, (4.64)
где L0 – индуктивность подвижной катушки.
Уравнение (4.64) удовлетворяется тем точнее, чем лучше выполняется неравенство w2с2r12 << 1. Отсюда следует, что расчет схемы частотной компенсации необходимо сочетать с расчетом температурной компенсации.
Погрешность от взаимной индуктивности возникает следующим образом. Переменный магнитный поток неподвижных катушек, пронизывая обмотку подвижной катушки, наводит в ней ЭДС, в результате чего создаются ток и дополнительный магнитный поток, который, взаимодействую с потоком неподвижных катушек, создает дополнительный момент DМвр и, следовательно, изменяет показания прибора. Погрешность от взаимной индуктивности зависит от значения и характера реактивного сопротивления цепи рамки. Если х2 < 0 (емкостной характер цепи), рамка стремится занять положение, при котором y = 0; если х2 > 0 (индуктивный характер цепи), рамка старается занять положение, при котором y = p/2. При чисто активной нагрузке цепи рамки среднее значение DМвр = 0, т. Е. Погрешность не возникает. Отсюда следует, что способ компенсации угловой погрешности включением конденсатора исключает и погрешность от взаимной индуктивности.
Кроме рассмотренных температурной и частотной погрешностей электродинамическим ваттметрам присущи также погрешности от влияния внешнего магнитного поля и электростатического взаимодействия. Для их компенсации применяют методы магнитной защиты и электростатическое экранирование.
4.3.5. Порядок расчета ваттметра
Исходными данными при расчете являются: класс точности; пределы измерения по току и напряжению; номинальный cos j; номинальное значение тока i2 в параллельной цепи (ГОСТ 8476 – 78). Кроме того, можно считать заданными коэффициент добротности (при расчете приборов на кернах) и отношение l /r2 » 0,8, что обеспечивает получение равномерной шкалы. Дополнительно могут быть заданы и другие эксплуатационные и производственные требования.
Можно указать следующий примерный порядок расчета. Исходя из класса точности, определяют длину шкалы, выбирают угол шкалы (обычно 90°), длину стрелки и габариты прибора, а также ориентировочные размеры катушек измерительного механизма.
Подсчитывают конструктивную массу gk. При этом несколько неопределенной является масса крыла успокоителя при использовании воздушного успокоения. Если применяют успокоение магнитоиндукционное, задача упрощается, так как в этом случае легче регулировать степень успокоения. Ориентировочно можно считать, что на крыло воздушного успокоителя надо прибавить к подсчитанной массе конструктивных деталей 15 – 20% этой массы.
Так как прибор работает в режиме заданного напряжения (заданы ток i2 и сопротивление цепи рамки), то для получения аmax необходимо выполнить условие ga = 0,5gk. Определяют g = ga + gk и из выражения для коэффициента добротности находят номинальное значение вращающего (противодействующего) момента Мном.
Далее приступают к расчету подвижной и неподвижной катушек. Сопротивление r2 цепи подвижной катушки находят (для каждого предела измерения) из заданных условий как r2 = u/i2. Это сопротивление состоит из сопротивления обмотки рамки r0 и сопротивлений, обеспечивающих компенсацию погрешностей и требуемый предел измерения.
Сопротивление обмотки рамки r0 можно найти из условий допустимого перегрева как
 , (4.65)
, (4.65)
Где p¢0 – удельная мощность, при которой перегрев рамки не превосходит 5 – 10°с (10 – 15 мВт/см2);
S0 – поверхность охлаждения рамки (известна из выбранной конструкции катушки).
Сопротивление рамки лимитируется также допустимой погрешностью gt. Для расчета должно быть принято меньшее из полученных двух значений. Зная массу обмотки и ее сопротивление, можно найти число витков рамки n2 и выбрать провод.
Расчет неподвижной катушки легко выполнить, так как известны Мном, i2, i1, n2 и геометрические размеры катушки. Определив число витков n1, выбирают диаметр провода обмотки неподвижных катушек из условий допустимого нагрева. Допустимую удельную мощность обычно выбирают порядка 25 – 30 мВт/см2. Площадь охлаждения неподвижных катушек определяется выбранной конструкцией. Далее рассчитывают время успокоения, параметры схемы для компенсации погрешностей и добавочные сопротивления.
Дата добавления: 2015-12-29; просмотров: 3452;