Основные требования при проектировании магнитных систем
При проектировании приборов с подвижными магнитами элементы выбирают исходя из получения максимального магнитного момента; в приборах с магнитным подвесом критерием оптимальности служит обеспечение максимальной силы тяги; для магнитных экранов – получение максимального коэффициента экранирования.
При проектировании решаются следующие основные задачи:
1. формулирование задачи и основных технических требований;
2. определение количественных значений основных характеристик, включая метрологические характеристики, массу, габариты, стоимость;
3. определение геометрии и размеров активных и пассивных элементов, их взаимного расположения;
4. выбор оптимальных типов магнитных материалов;
5. разработка (выбор) методов расчета с максимальным применением физического моделирования и машинного проектирования;
6. разработка конструкторской (графической и текстовой) технологической и эксплуатационной документации.
Проектирование чаще всего проводится на базе типовых конструкций магнитных систем. Геометрические размеры выбираются ориентировочно, затем корректируются и оптимизируются.
Системы с внешним магнитом обеспечивают большие значения индукции в рабочем зазоре и высокую однородность поля. Конструкции таких систем для осциллографических гальванометров имеют малый угол раствора шкалы (5 – 10)º. В логометрических механизмах для получения требуемой длины шкалы при малых габаритах применяют конструкции, обеспечивающие большой раствор (270 – 300)º.
Для постоянных магнитов применяют магнитотвердые материалы – железо – никель - алюминиевые сплавы, легированные титаном, ванадием, а также магнитотвердые ферриты и сплавы на основе редкоземельных материалов. Конструкции систем согласовываются с технологией их изготовления и свойствами (анизотропность, твердость, хрупкость и т.д.).
Магнитопроводы, шунты и наружные экраны выполняют из низкоуглеродистой электротехнической стали или стали 10. Внутренние экраны изготавливают из материалов с высокой магнитной проницаемостью в слабых полях (пермалоев). Для термомагнитных шунтов – материалы с сильной отрицательной зависимостью магнитной индукции от температуры.
В большинстве случаев проектирование магнитных систем проводят традиционными методами с использованием в качестве критерия оптимальности обеспечение заданного значения магнитной индукции в рабочем зазоре.
Поток в зазоре возникает после намагничивания материала сильным магнитным полем. Магнитные свойства (после снятия поля) характеризуются кривой размагничивания (Рис. 4.3).

Рис. 4.3. Кривая размагничивания и зависимость W = f(В)
Положение рабочей точки на этой кривой определяется конфигурацией магнитной цепи. Удельная магнитная энергия (Дж/м3) равна  . При изменении конфигурации магнитной цепи, например, значения воздушного зазора, меняется положение рабочей точки на кривой размагничивания. Наибольшему значению удельной магнитной энергии Wmax соответствует точка D.
. При изменении конфигурации магнитной цепи, например, значения воздушного зазора, меняется положение рабочей точки на кривой размагничивания. Наибольшему значению удельной магнитной энергии Wmax соответствует точка D.
Магнитные свойства материала оцениваются коэффициентом использования материала s – отношение магнитной энергии в воздушном зазоре к максимально возможной энергии магнита данного объема BDHDVМ:
 , (4.15)
, (4.15)
где ВР, НР – магнитная индукция и напряженность поля в рабочем зазоре; BD, HD – магнитная индукция и напряженность в точке W = Wmax; VР – объем рабочего зазора; VМ – объем магнита.
Коэффициент  можно представить как отношение магнитного потока в рабочем зазоре к потоку магнита, работающему в точке D:
можно представить как отношение магнитного потока в рабочем зазоре к потоку магнита, работающему в точке D:  .
.
Коэффициент использования материала характеризует потери энергии (или магнитного потока) на пути от магнитной нейтрали до рабочего зазора. Очевидно, что всегда меньше единицы; для систем высокого качества = 0,2...0,6.
Потери от рассеяния магнитного потокаобусловлены тем, что магнитное сопротивление воздуха не равно бесконечности. Для расчета проводимостей пользуются эмпирическими формулами и графиками.
Утечки имеются как по длине магнитопровода, так и по длине магнита. Наибольший поток в нейтрали, наименьший – на концах магнита.
Изменение индукции приводит к изменению м. д. с. на единицу длины магнита и, следовательно, к различным потерям потока на участках с одинаковой проводимостью. Поэтому расчет ведется методом последовательного суммирования утечек на малых участках, для которых В и Н можно считать постоянными.
На рисунках 4.4 и 4.5 показаны примеры магнитных систем.

а) б) в)
Рис. 4.4. Магнитные системы:
а – для прибора с большим (до 270о) углом шкалы: 1 – магнит; 2 – полюсные наконечники; 3 – рамка подвижной части; б – с подвижным магнитом: 1 – магнит; медный стакан, обеспечивающий успокоение подвижной части; 3 – обмотка с измеряемым током; 4 – магнитный экран; в – логометра: 1 – магнит; 2 – сердечник; 3 – катушки подвижной части.

а) б)
Рис. 4.5. Магнитные системы магнитоэлектрических измерительных механизмов:
а – с внешним магнитом; б – с внутрирамочным магнитом: 1 – постоянный магнит; 2 - магнитопровод; 3 – полюсные наконечники; 4 – сердечник.
Потери м. д. с. в магнитопроводахсводятся к минимуму выбором материала и сечения магнитопровода. Основное условие – чтобы не было полного насыщения материала.
Потери на поперечное намагничиваниеявляются причиной уменьшения полезной энергии. Учитываются введением эмпирических коэффициентов в расчетные соотношения. В приближенных расчетах этими соотношениями пренебрегают.
4.1.4. Измерительные механизмы. Особенности.
Методика расчета и проектирования
Применяют измерительные механизмы (им) с подвижной катушкой и подвижным магнитом. Большое применение имеет первая из указанных групп, которую мы и будем рассматривать далее.
В зависимости от назначения прибора (амперметр или вольтметр, осциллографический гальванометр, вибрационный гальванометр и др.) Им имеют различные особенности. Однако каждый из них содержит следующие основные узлы: магнитную систему, подвижную часть и обойму для соединения этих узлов и выполнения ряда второстепенных функций. Рассмотрим только широко применяемые им амперметров и вольтметров и приведём наиболее общие замечания относительно им других магнитоэлектрических приборов.
Подвижная часть. Методика проектирования подвижной части существенно зависит от способа крепления её на кернах, растяжках или подвесе.
Для приборов с креплением подвижной части на кернах проектирование ведут из условия получения максимального коэффициента добротности. Для приборов на растяжках существует ряд методов, например на основе обеспечения требуемого времени успокоения. Приборы на подвесе рассчитывают, решая систему уравнений, связывающих эксплуатационные параметры (чувствительность, период свободных колебаний и критическое сопротивление) с конструктивными (потокосцеплением, удельным противодействующим моментом и моментом инерции).
Расчет им с подвижной частью на кернах. При расчёте приборов из условия получения максимального коэффициента добротности амах детали подвижной части делят на: а) конструктивные, не участвующие в создании вращающего момента (для магнитоэлектрических им к ним относятся стрелки или зеркала в приборах со световым указателем, буксы с запрессованными кернами или держатели растяжек, пружинодержатели, противовесы для уравновешивания подвижной части, каркасы рамок); б) активные, участвующие в создании вращающего момента (в магнитоэлектрических им – обмотка рамки).
Конструктивные детали стремятся выполнить так, чтобы их масса gk и момент инерции jk были минимальными при одновременном удовлетворении ряда требований, к которым относятся: механическая прочность; необходимая точность отсчёта, определяемая длиной и углом шкалы, а также длиной и толщиной стрелки или светового луча; компенсация погрешности от неуравновешенности подвижной части и др. Для получения минимума gk и jk желательно применять бескаркасные рамки. Это возможно лишь тогда, когда требуемое время успокоения обеспечивается вихревыми токами, возникающими в обмотке при её движении в поле постоянного магнита. Это имеет место в том случае, если обмотка включена на малое внешнее сопротивление, например для амперметра с шунтом. Если успокоение от вихревых токов в обмотке недостаточно, применяют рамки с каркасом.
В процессе проектирования определяют параметры обмотки, вращающий и противодействующий моменты, время успокоения и коэффициент добротности.
Определение параметров обмотки различно для приборов, работающих в режимах: заданного тока (микро- и миллиамперметры, вольтметры) и заданного напряжения (милливольтметры, амперметры с шунтами). Это связанно с тем, что максимум коэффициента добротности для первой из указанных групп приборов имеет место при выполнении условия ga = 2× gk, а для второй – при gа = 0,5× gk.
Расчет параметров обмотки для микро - (милли) – амперметров и вольтметров. Этот расчёт основан на анализе выражения для амах при gа = 2× gk и имеет следующий вид:
 , (4.16)
, (4.16)
Где k – коэффициент пропорциональности;
B – магнитная индукция в рабочем зазоре;
2a и p – ширина и периметр рамки;
h – высота сердечника;
I0– номинальный ток;
d, p, kу – плотность материала провода, его сечение и коэффициент утяжеления.
Из выражения видно, что для получения возможно большего значения амах требуется выбирать провод с наименьшей плотностью d и наименьшим сечением q. Провода применяют медные или алюминиевые. Отношение dcu / dal = 8,9/2,7 = 3,3; однако kу для алюминиевого провода больше, чем для медного. Поэтому при выборе материала надо оценивать выгодность его применения по отношению произведений (dkу)×cu/(dkу)×al, также учитывать механическую прочность, технологичность процесса пайки и т.д. Провода, как правило, применяют медные. Если нет необходимости, провод диаметром менее 0,05 мм применять не следует.
По условиям получения амах число витков обмотки
 . (4.17)
. (4.17)
Подсчитав n, необходимо проверить, укладывается ли полученное число витков в окно рамки. Если количество витков, определенное, не помещается в рамке, ограничивают их число наиболее возможным.
Расчет параметров обмотки для милливольтметров и амперметров с шунтами. Для приборов этой группы условию а = амах соответствует ga = 0,5×gk. Заданным также является сопротивление обмотки r0 = pnp / q (p – удельное электрическое сопротивление материала провода). Решая эти уравнения относительно n и q и учитывая, что gk = dpnqkу, получают
 , (4.18)
, (4.18)
 . (4.19)
. (4.19)
Определив параметры обмотки, рассчитывают вращающий и противодействующий моменты
 , (4.20)
, (4.20)
Где I0 – номинальный ток в обмотке.
Из уравнения можно подсчитать удельный противодействующий момент w и выбрать моментные пружины (гост 9933-69).
Зная общую массу подвижной части g0 = ga + gk, определяют момент инерции j = ja + jk и рассчитывают время успокоения.
В заключение проверяют величину коэффициента добротности прибора. Если он соответствует средним статистическим данным для приборов данной группы, расчет им закончен.
Расчет им приборов с подвижной частью на растяжках. В основу расчета положено обеспечение требуемого времени успокоения tу. Порядок расчета следующий.
Задается степень успокоения
 , (4.21)
, (4.21)
Где bсх – степень успокоения, создаваемая обмоткой рамки;
bk – степень успокоения, создаваемая каркасом рамки (bk = 0,8 – 0,9b).
Обычно выбирают b = 0,9 – 1,1. По графику для заданного значения b находят относительное время успокоения
 . (4.22)
. (4.22)
Подсчитывают полный момент инерции подвижной части:
 , (4.23)
, (4.23)
Где j¢k – момент инерции каркаса рамки;
J0 – момент инерции обмотки.
Значение j¢k берут из данных нормали МН 4055-62 или определяют по общим формулам.
 , (4.24)
, (4.24)
Где с – толщина каркаса.
Остальные значения соответствуют указанным или принятым ранее.
Момент инерции обмотки, наложенной на рассмотренный каркас,
 , (4.25)
, (4.25)
В выражении неизвестным является произведение сечения провода q на число витков n. Плотность материала провода d известна, если задаются материалом, а коэффициент утяжеления kу для проводов разного сечения и разного вида изоляции меняется сравнительно мало (kу = 1,05 – 1,1).
Предлагается считать, что
 , (4.26)
, (4.26)
Где kз = 0,6 – 0,8 – коэффициент заполнения.
Далее вычисляют:
А) удельный противодействующий момент
 , (4.27)
, (4.27)
Б) потокосцепление
 , (4.28)
, (4.28)
Где сi = i0 /aн – постоянная измерительного механизма;
В) число витков
 , (4.29)
, (4.29)
Г) сечение провода
 . (4.30)
. (4.30)
Качество рассчитанного этим методом измерительного механизма предлагается оценивать коэффициентом уравновешенности аур = м90 /g. Если аур > 4, то качество им можно считать удовлетворительным.
4.1.5. Измерительные цепи приборов
Характер измерительных цепей магнитоэлектрических приборов определяется родом измеряемой величины, пределами измерений и необходимостью компенсации температурной погрешности.
Наиболее специфичной является третья причина, поэтому, рассматривая измерительные цепи магнитоэлектрических приборов, ограничимся только некоторыми схемами температурной компенсации.
При отклонении температуры от градуировочной (для определённости рассматриваем случай повышения температуры) уменьшаются магнитная индукция в рабочем зазоре и удельный противодействующий момент и увеличивается электрическое сопротивление обмотки рамки и упругих элементов (пружинок и растяжек).
Две первые причины взаимно компенсируют друг друга, так как одна из них вызывает уменьшение, а другая – увеличение показаний и количественно эти эффекты приблизительно равны. Таким образом, основное внимание следует уделять компенсации температурной погрешности, вызванной изменением электрического сопротивления. Эту погрешность можно уменьшить, включая последовательно с температурно-зависимым сопротивлением rt добавочное сопротивление rд из материала, электрическое сопротивление которого практически не зависит от температуры. Результирующий температурный коэффициент такой цепи
 , (4.31)
, (4.31)
где bt – температурный коэффициент сопротивления материала резистора.
Из выражения видно, что чем больше может быть соотношение rд / rt, тем меньше b и, следовательно, тем меньше температурная погрешность gt . Так, для вольтметров на пределы измерения больше 3 – 5в несложно уменьшить gt до значений, соответствующих классу точности 0,2 и даже 0,1. Однако для милливольтметров, к которым можно отнести и амперметры с шунтом, этот способ компенсации неэффективен, прежде всего, потому, что связан с увеличением собственного потребления, т.е. С уменьшением чувствительности прибора.
Для милливольтметров основными схемами температурной компенсации являются последовательно-параллельная схема и схема с термосопротивлением.
4.1.6. Последовательно-параллельная схема
температурной компенсации милливольтметров
Электрическая цепь измерительного механизма (рис.4.6) состоит из сопротивления обмотки и последовательно с ним включённого сопротивления упругих элементов (пружинок или растяжек).
Температурные коэффициенты рис.4.6 электрического сопротивления материалов обмотки и упругих элементов, как правило, различны.

Рис.4.6. Последовательно-параллельная схема температурной
компенсации милливольтметра
При расчете сопротивление упругих элементов разбивают на две части: “медную”, имеющую температурный коэффициент такой же, как и материал обмотки, выполняемой обычно из меди, и “манганиновую” – с нулевым температурным коэффициентом. Соотношение между этими сопротивлениями рассчитывают так, чтобы при их последовательном включении результирующий температурный коэффициент соответствовал реальному коэффициенту материала упругих элементов. На схеме обозначены.
r0 – сумма сопротивлений обмотки и “медной” части упругих элементов (b = b0);
r1 – сумма “манганиновой” части сопротивления упругих элементов и добавочного сопротивления из манганина (b = 0);
r3 – сопротивление шунта, выполняемого обычно из меди или никеля (  ).
).
Задача расчета схемы состоит в таком выборе сопротивлений r0, r1, r2, r3, при котором наилучшим образом обеспечивается температурная компенсация.
Температурную погрешность можно представить следующим образом
 ,(4.32)
,(4.32)
Где I0 – ток в цепи им при температуре градуировки t0;
I0t – ток в цепи им при температуре t = t0 + q ;
 . (4.33)
. (4.33)
Из выражения видно, что  состоит из двух составляющих: линейно зависящей от q и квадратично зависящей от q. Расчеты показывают, что вторая составляющая намного меньше первой и в большинстве случаев ею можно пренебречь. Тогда gt = 0, если выполняется условие
состоит из двух составляющих: линейно зависящей от q и квадратично зависящей от q. Расчеты показывают, что вторая составляющая намного меньше первой и в большинстве случаев ею можно пренебречь. Тогда gt = 0, если выполняется условие
 . (4.34)
. (4.34)
 . (4.35)
. (4.35)
Принимая это обозначение, вместо него можно написать
 , (4.36)
, (4.36)
Т.е. для компенсации температурной погрешности необходимо, чтобы добавочное сопротивление было меньше суммы этого добавочного сопротивления и сопротивления шунта r3 во столько раз, во сколько температурный коэффициент цепи рамки меньше температурного сопротивления шунта.
Условие, при котором выполняется требование gt = 0, не содержит температуру перегрева q, т.е. Справедливо для любого диапазона изменения температур. Такой вывод имеет место в результате принятого допущения (исключением из рассмотрения зависимости gt от составляющей, содержащей q 2). Учёт этой зависимости показывает, что в действительности для заданного диапазона изменения температуры q требование gt = 0 можно выполнить только для двух температур внутри этого диапазона.
Из требования gt = 0 имеем одно условие, выражаемое уравнением для расчета схемы, но так как неизвестных четыре (r0, r1, r2, r3), то требуется выбрать еще три. Такими условиями могут быть, например: а) получение максимального падения напряжения на рамке, б) задание общего входного сопротивления прибора, в) получение максимальных ампер-витков в рамке, что соответствует наибольшему вращающему моменту.
Требованию u0max соответствует уравнение
 , (4.37)
, (4.37)
Которое выполняется при
 . (4.38)
. (4.38)
Входное сопротивление
 . (4.39)
. (4.39)
Выполнение условия (i0 n)max производят в такой последовательности: находят ток через обмотку; определяют сопротивление обмотки rобм, вычитая из сопротивления r0 сопротивления “медной части” упругих элементов (~0,2 Ом); по формуле полученной из условия обеспечения максимального коэффициента добротности для милливольтметров, подсчитывают число витков обмотки n и определяют ампер-витки обмотки рамки как i0n.
Аналитически уравнения, определяющие выбранные условия, совместно не решаются, поэтому для расчета схемы можно воспользоваться методом подбора или вспомогательными графиками, номограммами и т.п.
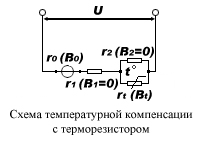
Рис. 4.7. Схема температурной компенсации с терморезистором
Рассмотренная схема обладает высокой стабильностью, технологичностью и позволяет обеспечить требуемую температурную компенсацию для приборов самых высоких классов точности. Однако она имеет и существенный недостаток – большое собственное потребление, возрастающее с повышением требований к температурной компенсации. Полезная используемая мощность для этой схемы составляет примерно 10% от мощности, подводимой к прибору. От этого недостатка свободна схема с полупроводниковым терморезистором (рис.4.7).
Однако ввиду недостаточно высокой воспроизводимости свойств и пониженной стабильности схемы с терморезисторами применяют в приборах классов точности 1,5; 2,5. (не выше чем класс 0,5). Применяют другие схемы и методы термокомпенсации – мостовые схемы, термомагнитные шунты и т.д.
4.2. ЭЛЕКТРОМАГНИТНЫЕ ПРИБОРЫ
4.2.1. Свойства и классификация приборов
Приборы электромагнитной системы применяются для измерения в цепях переменного и постоянного токов, главным образом в качестве щитовых амперметров и вольтметров переменного тока благодаря своим высоким эксплуатационным качествам: простоте конструкции и дешевизне, надежности в эксплуатации, обусловленной простотой и прочностью деталей и узлов измерительного механизма, высокой термической устойчивости к длительной перегрузке, широкому диапазону пределов измерений.
Для точных измерений тока и напряжения созданы электромагнитные приборы высокой точности (классов 0,5; 0,2 и 0,1), которые по основным техническим характеристикам (точности, пригодности применения на постоянном и переменном токе, частотному диапазону, потребляемой мощности) практически не уступают приборам электродинамической системы. Некоторые иностранные фирмы выпускают точные приборы высокой чувствительности: вольтметры с верхним пределом измерений 1,5 В и миллиамперметры – 3 мА.
В настоящее время применяется большое число различных типов электромагнитных приборов, которые различаются по назначению, конструкции, форме катушек и сердечников и т.д.
В зависимости от инерционности подвижной части или частоты ее собственных колебаний все электромагнитные приборы разделяются на две группы: резонансные и нерезонансные. Резонансные работают только на переменном токе. В этих приборах частота собственных колебаний подвижной части подбирается равной или кратной частоте тока. В нерезонансных приборах момент инерции подвижной части значителен, и подвижная часть успевает следить за измерением переменного тока, а смещается под действием среднего усилия за период. Смещение подвижной части пропорционально квадрату действующего значения тока. В поляризованных приборах кроме намагниченной катушки имеется постоянный магнит. Поляризованные нерезонансные приборы, широко применяемые в качестве автомобильных и тракторных амперметров, так же как и неполяризованные, не обладают высокой точностью и в курсе аналоговых приборов не рассматриваются. Из резонансных приборов в основном применяются язычковые герцметры.
В зависимости от характера магнитной цепи нерезонансные приборы разделяются на приборы с магнитопроводом, условно называемом замкнутым, и без магнитопровода. Приборы с магнитопроводом имеют меньшее собственное потребление мощности, но вместе с этим и значительные погрешности из-за потерь в магнитопроводе от вихревых токов и гистерезиса. Они применяются в качестве щитовых фазометров, синхроноскопов, а в последние годы также и в качестве щитовых амперметров и вольтметров переменного тока. Приборы без магнитопровода имеют малое собственное магнитное поле и большую зависимость показаний от влияния внешних магнитных полей. Однако они широко применяются, так как позволяют создать приборы высокой точности для работы на постоянном и переменном токе. По принципу действия эти приборы подразделяются на приборы отталкивающего и втяжного действия. В приборах первого типа, расположенные внутри катушки с током ферромагнитные сердечники разомкнутой формы намагничиваются одновременно и отталкиваются друг от друга, а в приборах второго типа подвижный ферромагнитный сердечник втягивается в магнитное поле катушки с током.
4.2.2. Конструкции измерительных механизмов
Электромагнитные им различаются формой намагничивающих (рабочих) катушек, а также числом и формой ферромагнитных сердечников. Чаще других применяются круглые и прямоугольные катушки, цилиндрические и призматические сердечники.
На рис. 4.8 даны конструктивные схемы наиболее распространенных механизмов отталкивающего действия.
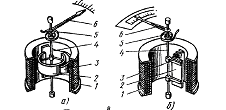
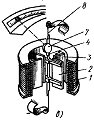
Рис.4.8. Конструктивные схемы электромагнитных механизмов отталкивающего действия:
а – с круглой катушкой и цилиндрическими сердечниками;
б – с круглой катушкой и плоскими призматическими сердечниками
Механизм, показанный на рис. 4.8,а, имеет круглую рабочую катушку 1 и два цилиндрических (коаксиальных) сердечника 2 и 3. Один сердечник 3 неподвижен, а другой 2 укреплен вместе с указателем 6 на оси 4 подвижной части. Их форма обусловлена необходимостью получения требуемого характера шкалы. При прохождении тока по обмотке катушки оба сердечника намагничиваются с одинаковой полярностью, вследствие чего подвижный сердечник отталкивается от неподвижного. Так образуется вращающий момент механизма. Противодействующий момент создается спиральной пружиной 5, а успокоение подвижной части механизма осуществляется воздушным или магнитоиндукционным успокоителем. Для снижения влияния внешних магнитных полей рабочая катушка экранизируется (экраны и успокоители на рис.4.8,а-б не показаны). Сердечники и экраны изготавливают из магнитомягких материалов. Механизм с круглой катушкой и цилиндрическими сердечниками широко применяют в щитовых приборах различного назначения. Его достоинством наряду с очень простой и удобной регулировкой является возможность получения требуемого характера шкалы.
Механизмы, показанные на рис. 4.8,б имеют круглую рабочую катушку 1 и одну или две пары одинаковых радиально и симметрично расположенных внутри нее плоских призматических сердечников 2 и 3. В механизме с одной парой сердечников (рис.4.8,б) один сердечник 3 неподвижен, а другой 2 укреплен вместе с указателем 6 на оси 4 подвижной части. В механизме с двумя парами сердечников одна пара сердечников неподвижна, а другая пара укреплена на оси вместе с зеркалом светового указателя. При таком расположении сердечников устраняются радиальные усилия, что особенно благоприятно при использовании растяжек. Вращающий момент механизмов (рис. 4.9,а,б) создается за счет отталкивания подвижных сердечников от неподвижных при прохождении тока по обмотке катушек, а противодействующий – спиральной пружиной 5 и растяжками. Механизмы подобного типа используются в лабораторных приборах.
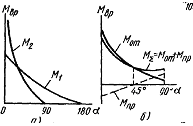
Рис. 4.9. Кривые вращающих моментов:
а – кривые Мвр = f(a) для механизмов с круглой катушкой и одной (М1) или двумя (М2) парами плоских призматических сердечников; б – кривые Мвр = f(a) для механизма с секторной катушкой
Сердечники в этих механизмах выполнены из железоникилиевых сплавов (пермаллоев) с малой коэрцитивной силой, что обеспечивает совпадение показаний электромагнитных приборов на постоянном и переменном токе. Призматическая форма сердечников позволяет избежать дополнительных механических деформаций сердечников при сборке им и, следовательно, сохранить высокие магнитные характеристики железоникилиевых сплавов после отжига сердечников. Отличительной особенностью этих механизмов является выполнение основных конструктивных элементов (обоймы, каркаса рабочей катушки, а иногда и оси) из керамических материалов. Это вызвано требованием сохранения высокой точности приборов во времени при одновременном уменьшении влияния температуры и влажности и снижения погрешности, обусловленных вихревыми токами. Для защиты механизмов от влияния внешних магнитных полей применены двойные магнитные экраны из железоникилиевых сплавов. Все перечисленные мероприятия позволили разработать электромагнитные приборы высокой точности (классов 0,2 и 0,1). В таких приборах получен равномерный характер шкалы даже при малых углах отклонения подвижной части.
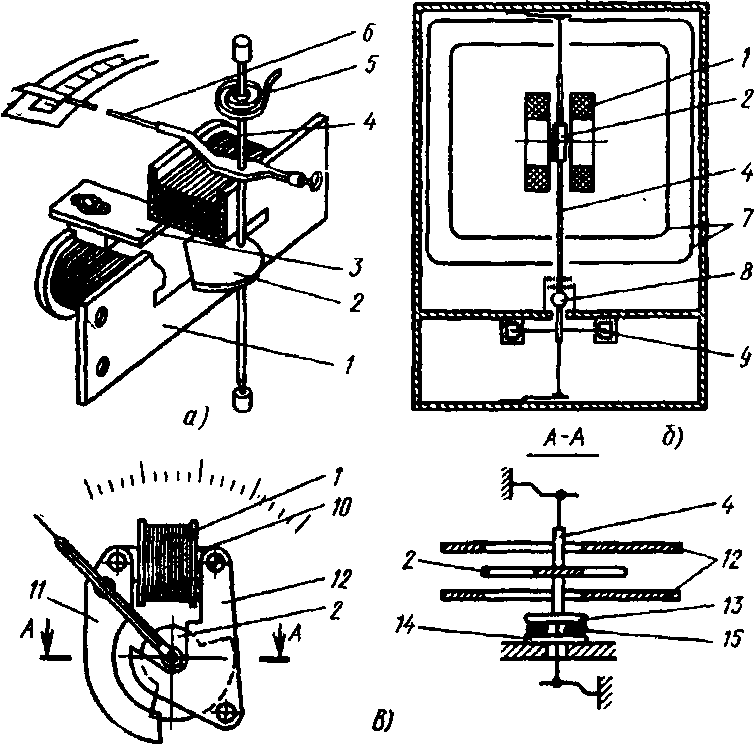
Рис. 4.10. Конструктивные схемы электромагнитных механизмов втяжного действия:
А – с плоской катушкой; Б – с прямоугольными катушками и призматическим сердечником; В – с магнитопроводом
На рис. 4.10,а,б даны конструктивные схемы механизмов втяжного действия. Механизм с плоской катушкой (рис. 4.10,а) используется в лабораторных и щитовых приборах отечественного производства и состоит из плоской катушки 1, в узкую щель которой втягивается подвижный сердечник 2, имеющий форму усеченного диска и эксцентрично закрепленный на оси 4 подвижной части. Для регулировки угла отклонения подвижной части служит магнитный шунт 3. Такие механизмы имеют меньшую потребляемую мощность и меньший расход меди по сравнению с механизмами, имеющими круглую катушку. Однако в технологическим отношении они более сложны.
Механизм с магнитопроводом (рис. 4.10,б), широко применяемый в щитовых амперметрах и вольтметрах, состоит из стержня 5 с надетой на него рабочей катушкой 1, двух пар полюсных наконечников 6, 7 и подвижного сердечника 2, перемещающегося в зазоре между полюсными наконечниками и закрепленного на оси 4 подвижной части. Стержень и полюсные наконечники магнитопровода изготавливают из пермаллоя 79нм толщиной 1 мм, а подвижный сердечник – из стали 1521 толщиной 0,2 мм. Противодействующий момент создается растяжками, а успокоение подвижной части осуществляется жидкостным успокоителем, состоящим из двух полированных металлических колец – подвижного 8, укрепленного на оси подвижной части, и неподвижного 9. Между кольцами находится слой специальной невысыхающей жидкости 10 (полиметиллоксановая жидкость пмс-500). Момент успокоения возникает за счет сцепления частиц жидкости с кольцами при повороте подвижной части. Механизм с магнитопроводом имеет сильное собственное поле и экранирования не требует. В этом механизме можно получить необходимый вращающий момент при меньшем собственном потреблении мощности. На основании такого механизма освоен массовый выпуск щитовых амперметров и вольтметров промышленной частоты высокой чувствительности (миллиамперметры с верхним пределом измерения от 1,5 мА и вольтметры – от 0,5 в).
4.2.3. Измерительные цепи. Расчет электрических
параметров амперметров и вольтметров
Однопредельные амперметры и миллиамперметры (рис. 4.11,а) имеют наиболее простую ИЦ, состоящую из одной рабочей катушки механизма, включаемой непосредственно в сеть. Разные пределы измерения по току в таких амперметрах получают изменением числа витков и сечения провода катушки при одинаковых ампер-витках. С увеличением номинального тока число витков уменьшается, а сечение провода обмотки увеличивается. При очень больших токах (200 – 300 а) рабочая катушка превращается в виток из медной шины. Для расширения пределов измерения амперметров переменного тока используют измерительные трансформаторы тока.
В многопредельных амперметрах, применяемых в качестве переносных приборов, рабочую катушку выполняют секционированной и с помощью переключателя получают различные схемы соединения секций катушки. Двухпредельные амперметры имеют две секции, включаемые последовательно или одну параллельно (рис.4.11,б), а трехпредельные – четырех, включаемые последовательно, смешанно или параллельно (рис.4.11,в). При этом если все секции выполнены с равными числами витков, отношение токов на разных пределах измерения будет 1:2:4. Для получения одной шкалы на всех пределах измерения намотку всех секций катушки необходимо производить одновременно несколькими проводами в однопредельных вольтметрах последовательно с рабочей катушкой включают добавочный резистор из манганина (рис.4.11, г). Соотношение сопротивлений рабочей катушки rк и добавочного резистора rд определяется в основном температурной погрешностью или классом точности вольтметра..
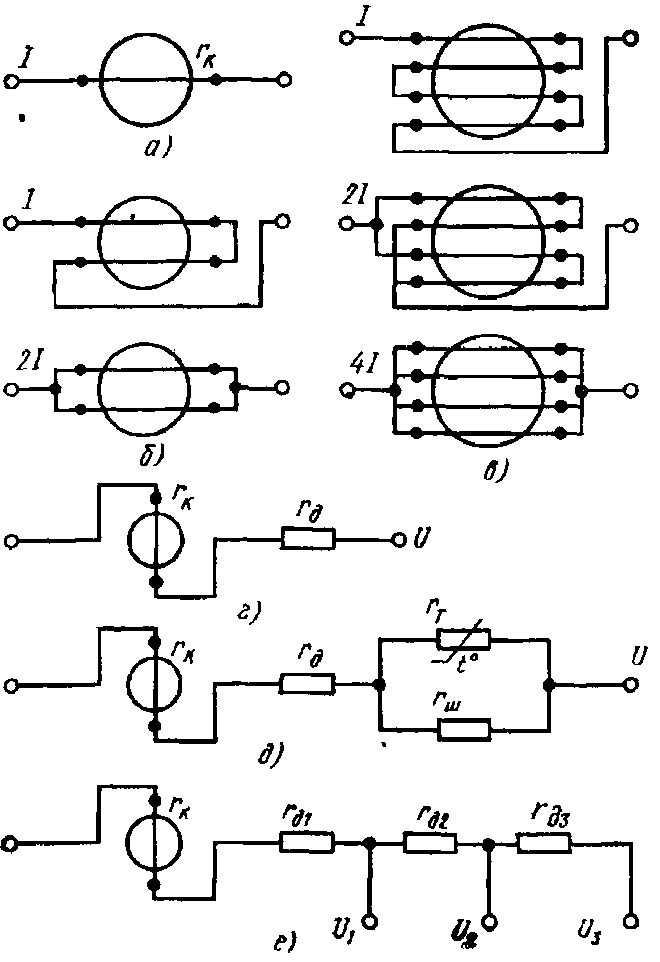
Рис. 4.11. Схемы измерительных цепей амперметров и вольтметров:
а – однопредельного амперметра; б – двухпредельного амперметра; в – трехпредельного амперметра; г – одаопредельвого вольтметра; д – вольтметра с терморезистором; е – многопредельного вольтметра
Например, для вольтметров класса точности 1,5rд ³ 3rк, а класса точности 0,5rд ³ 10rк. С уменьшением предела измерения вольтметра необходимо увеличить ток потребления, чтобы температурная погрешность не превысила допустимого значения.
Применение терморезисторов (термисторов) с отрицательным температурным коэффициентом сопротивления дает возможность одновременно снизить температурную погрешность и собственное потребление вольтметра. В схеме вольтметра с терморезистором (рис.4.11, д) для получения температурной компенсации в широком интервале температур терморезистор rт, шунтируют проволочным резистором rш из манганина и этим выпрямляют его температурную характеристику. Можно применять терморезисторы и для многопредельных переносных вольтметров класса 0,5.
Схема ИЦ многопредельного вольтметра показана на рис. 4.11,е. Пределы измерения по напряжению отличаются друг от друга значением сопротивления добавочного резистора. При этом ток потребления остается неизменным.
Схемы ИЦ амперметров и вольтметров рассчитывают на основе заданных ампер-витков и выбранных размеров рабочей (намагничивающей) катушки. Для наиболее распространенной круглой катушки основными размерами обмотки являются: d0, d0 и l0 – внутренний и наружный диаметры и длина обмотки. В этом случае расчетными параметрами катушки будут: s0 – площадь окна катушки; lср – средняя длина витка и sохл – поверхность охлаждения катушки, определяемые по формулам:
 . (4.40)
. (4.40)
Расчет амперметров (по схеме рис. 4.11, а) выполняют в следующем порядке.
А) определяют число витков обмотки n и число витков на единицу площади окна катушки n по таким формулам:
 , (4.41)
, (4.41)
Где In – заданные ампер-витки рабочей катушки;
I – предел измерения амперметра.
Б) из таблицы проводов марок ПЭВ-1 и ПЭВ-2 (ГОСТ 7262 – 78) по ближайшему большому значению n’ выбирают диаметр и площадь сечения провода qтаб.
В) рассчитывают сопротивление обмотки рабочей катушки rк, выделяемую в обмотке мощностью рк и температуру перегрева обмотки ок по известным формулам:
 , (4.42)
, (4.42)
Где р – удельное сопротивление меди;
k – коэффициент теплоотдачи [при расчетах принимают равным 1,5·10–3 Вт/(см2· с)].
Следует заметить, что расчет ок по приведенной формуле является приближенным. Более точные значения ок, удовлетворительно совпадающие с экспериментом, получаются, когда за sохл принимается полная поверхность охлаждения обмотки (наружная, внутренняя и торцовые) и когда учитывается влияние экрана на катушке путем уменьшения k до (1,1 – 1,2)·10-3 Вт/(см2·с) [для катушек без экрана k =1,5·10–3 Вт/(см2· с)].
Расчет вольтметра (по схеме рис.4.11, г) производят в другом порядке.
А) определяют сечение провода обмотки рабочей катушки по формуле:
 , (4.43)
, (4.43)
Где u – заданный предел измерения вольтметра;
В0 – температурный коэффициент сопротивления материала обмотки рабочей катушки (для меди в0 = 4%/10 с);
Вw – термоупругий коэффициент материала пружинок или растяжек (для сплава плср20 Вw = – 0,25%/10 с);
Yt – допустимая температурная погрешность вольтметра.
Б) из таблицы проводов марок пэв-1 и пэв-2 по ближайшему большому значению q выбирают диаметр провода и величины qтаб и n¢.
В) рассчитывают число витков рабочей катушки n, ток потребления i, сопротивление обмотки рабочей катушки rк, полное сопротивление вольтметра rв, сопротивление добавочного резистора rд, мощность р, потребляемую вольтметром, мощность рк, выделяемую в обмотке рабочей катушки, и температуру перегрева обмотки ок по известным формулам:
 , (4.44)
, (4.44)
Где rк (а также pк и ок) определяются по формулам (4.42).
4.2.4. Основные виды погрешности и способы уменьшения
В электромагнитных приборах с некоторыми общими погрешностями, характерными для большинства электромеханических приборов (погрешности отсчета, от трения в опорах, от опрокидывания, от упругого последствия пружинок или растяжек и т. д.), имеют место специфические погрешности.
Погрешность от гистерезиса материала сердечников и экранов появляется при работе прибора на постоянном токе, когда есть разница в показаниях прибора при возрастании и убывании тока. Для снижения этой погрешности сердечники изготавливают из высококачественных железоникилиевых сплавов с малой коэрцитивной силой и затем подвергают отжигу в вакууме или водороде.
С достаточной для практики точностью погрешность yh можно определить по формуле:
 , (4.45)
, (4.45)
Где b = 2hс – ширина петли гистерезиса материала сердечников (нс – коэрцитивная сила);
Нк – напряженность магнитного поля рабочей катушки в месте расположения сердечников, определяемая по известным формулам.
Погрешность переносных вольтметров от собственного нагрева рабочей катушки проходящим по ней током можно подсчитать по формуле:
 , (4.46)
, (4.46)
Где вц = в0rк / (rк + rд1) – температурный коэффициент сопротивления цепи катушки;
Ор – температура перегрева растяжек (пружин), принимаемая обычно равной ок.
Изменение показаний электромагнитных вольтметров, вызванное измерением окружающей температуры, определяется величинами температурных коэффициентов сопротивления цепи катушки (вц) и упругости материала растяжек или пружин (вw):
 , (4.47)
, (4.47)
Т. Е. Зависит в основном от соотношения сопротивлений рабочей катушки rк и добавочного резистора rд.
Для амперметров и миллиамперметров изменение показаний определяется только значением вw:
 , (4.48)
, (4.48)
Применение терморезисторов для компенсации температурной погрешности вольтметров (рис. 4.11, д) позволяет значительно снизить потребляемую им мощность и улучшить метрологические качества. В этом случае изменение показаний, вызванное изменением внешней температуры, определяют по формуле:
 , (4.49)
, (4.49)
Где rв = rк + rд + rтк – общее сопротивление вольтметра;
rтк = rтrш /(rт + rш) – сопротивление термокомпенсатора, состоящего из терморезистора rт и манганинового шунта rш;
Втк = втrш /(rт + rш) – температурный коэффициент сопротивления термокомпенсатора (вт – температурный коэффициент сопротивления терморезистора).
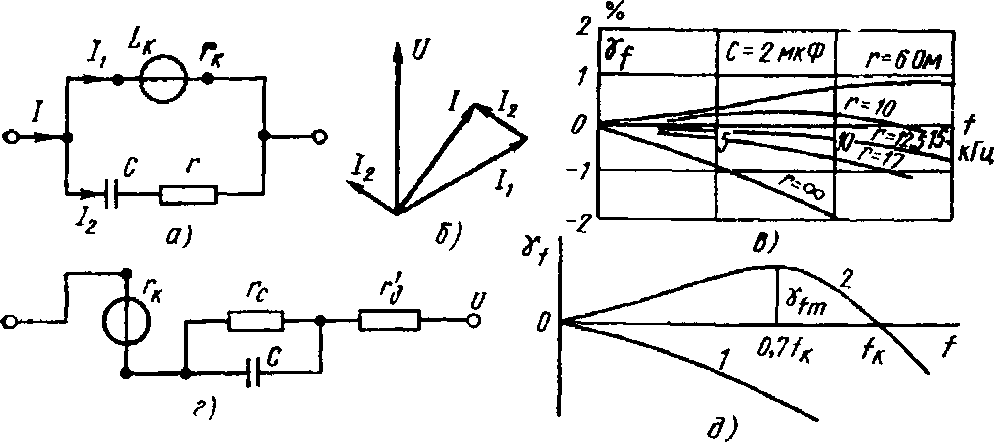
Рис. 4.12. Схемы частотной компенсации и кривые частотных погрешностей:
а – частотная компенсация амперметра; б – векторная диаграмма токов; в – кривые частотных погрешностей амперметра э59; г – схема частотной компенсации вольтметра; д – кривые частотных погрешностей вольтметра
Изменение показаний электромагнитных приборов, вызванное изменением частоты, обусловлено влиянием вихревых токов, изменением индуктивного сопротивления рабочей катушки и наличием межвитковой емкости этой катушки. При работе прибора на переменном токе в металлических деталях им индуцируются вихревые токи, значение и угол сдвига которых (относительно рабочего тока) меняются при изменении частоты и угла отклонения подвижной части, что ведет к изменению показаний прибора. Последнее становится заметным при работе на повышенных частотах и является основной составляющей частотной погрешности амперметров.
Для компенсации частотных погрешностей амперметров и снижения влияния гармонических составляющих на их показания предложена схема с шунтированием рабочей катушки емкостью С и активным резистором r (рис. 4.12, а). Векторная диаграмма токов в схеме приведена на рис. 4.12,б, а кривые частотных погрешностей амперметра э59 на 2,5 А, компенсированного по схеме рис. 4.12,а (при с = 2 мкФ, lк = 0,009 мг, rк = 0,015 Ом), приведены на рис. 4.12, в. Применение этой схемы позволяет расширить частотный диапазон амперметров в шесть-семь раз.
В вольтметрах основной причиной частотной погрешности является изменение индуктивного сопротивления рабочей катушки. Изменение показаний вольтметра, обусловлено изменением частоты от f1 до f2, при отсутствии частотной компенсации определяют по формуле
 , (4.50)
, (4.50)
Где L – индуктивность рабочей катушки;
rв – общее активное сопротивление вольтметра.
Для снижения частотной погрешности, обусловленной изменением индуктивного сопротивления рабочей катушки вольтметра, применяют различные схемы частотной компенсации. Чаще других используют схему с шунтированием части добавочного сопротивления емкостью (рис. 4.12, г) относительное изменение показаний вольтметра с частотной компенсацией по этой схеме, вызванное изменением частоты от 0 до f, определяют по формуле:
 , (4.51)
, (4.51)
Где xl – индуктивное сопротивление рабочей катушки на частоте f в данной точке шкалы;
rс – часть добавочного резистора, зашунтированная емкостью;
Xс – емкостное сопротивление компенсирующей емкости с на частоте f;
rв = rк + rс + r¢д – полное активное сопротивление вольтметра.
Значение компенсирующей емкости рассчитывают по формуле
 . (4.52)
. (4.52)
Изменение показаний вольтметра, вызванное изменением частоты, при шунтировании добавочного резистора емкостью имеет максимальное значение при частоте f = 0,7fк, где fк – частота, на которой производится компенсация. Следует заметить, что полную компенсацию частотной погрешности вольтметра по рассматриваемой схеме можно осуществить только в одной точке частотного диапазона и для определенной точки шкалы, так как индуктивность l изменяется по длине шкалы. Обычно компенсация производится на отметке шкалы, равной приблизительно 80% номинального значения измеряемой величины. Кривые частотных погрешностей вольтметра без компенсации и вольтметра, компенсированного по схеме рис. 4.12, г, приведены на рис.4.12, д (кривые 1 и 2).
Изменение показаний электромагнитного прибора под влиянием внешнего магнитного поля при самом неблагоприятном направлении поля и отсутствии магнитного экранирования определяют по формуле
 , (4.53)
, (4.53)
Где HB – 400 а/м – напряженность внешнего поля при испытании прибора;
Нк – напряженность поля внутри рабочей катушки при номинальном токе в обмотке.
При небольших значениях Hк – (2500 – 4000 а/м) получим недопустимо большие значения Yн (более 10%). Применение магнитного экранирования измерительного механизма снижает yн до требуемых значений, так как при этом внешнее магнитное поле уменьшается экраном в kэ раз, где kэ – коэффициент экранирования.
Изменение показаний электромагнитных приборов, вызванное отклонением формы кривой тока или напряжения от синусоидальной, оказывается существенным только при больших значениях магнитной индукции в сердечниках, близких к насыщению. Для уменьшения влияния формы кривой необходимо ликвидировать возможность насыщения сердечников (и экранов), т. Е. Выбрать ампер-витки рабочей катушки и размеры сердечников такими, чтобы значение магнитной индукции в сердечниках составляло не более 30 – 40% от индукции насыщения. Кроме того, для снижения влияния высших гармоник, содержащихся в искаженной форме кривой тока или напряжения, необходимо уменьшить частотную погрешность прибора от изменения индуктивного сопротивления и от потерь на вихревые токи.
Дата добавления: 2015-12-29; просмотров: 1459;