Записать основные уравнения работы электрической машины постоянного тока в режиме двигателя.
Под действием напряжения, подведенного к якорю двигателя, в обмотке якоря появится ток Iя. При взаимодействии тока с магнитным полем индуктора возникает электромагнитный вращающий момент

где CM - коэффициент, зависящий от конструкции двигателя.
На рис. 12 изображен схематично двигатель постоянного тока, выделен проводник якорной обмотки.
 Ток в проводнике направлен от нас. Направление электромагнитного вращающего момента определится по правилу левой руки. Якорь вращается против часовой стрелки. В проводниках якорной обмотки индуцируется ЭДС, направление которой определяется правилом правой руки. Эта ЭДС направлена встречно току якоря, ее называют противо-ЭДС.
Ток в проводнике направлен от нас. Направление электромагнитного вращающего момента определится по правилу левой руки. Якорь вращается против часовой стрелки. В проводниках якорной обмотки индуцируется ЭДС, направление которой определяется правилом правой руки. Эта ЭДС направлена встречно току якоря, ее называют противо-ЭДС.
Рис. 12
В установившемся режиме электромагнитный вращающий момент Мэм уравновешивается противодействующим тормозным моментом М2 механизма, приводимого во вращение.

 На рис. 13 показана схема замещения якорной обмотки двигателя. ЭДС направлена встречно току якоря. В соответствии со вторым законом Кирхгофа
На рис. 13 показана схема замещения якорной обмотки двигателя. ЭДС направлена встречно току якоря. В соответствии со вторым законом Кирхгофа  , откуда
, откуда
 . (3)
. (3)
Рис.13 Уравнение (3) называется основным уравнением двигателя.
Из уравнения (3) можно получить формулы:
 (4)
(4)
 (5)
(5)
Магнитный поток Ф зависит от тока возбуждения Iв, создаваемого в обмотке возбуждения. Из формулы (5) видно, что частоту вращения двигателя постоянного тока n2можно регулировать следующими способами:
1. изменением тока возбуждения с помощью реостата в цепи обмотки возбуждения;
2. изменением тока якоря с помощью реостата в цепи обмотки якоря;
3. изменением напряжения U на зажимах якорной обмотки.
Чтобы изменить направление вращения двигателя на обратное (реверсировать двигатель), необходимо изменить направление тока в обмотке якоря или индуктора.
34. Какие механические характеристики электродвигателей постоянного тока Вы знаете?
Рассмотрим двигатель с параллельным возбуждением в установившемся режиме работы (рис. 11.14). Обмотка возбуждения подключена параллельно якорной обмотке.
 , откуда
, откуда 
 (11.6)
(11.6)
Механической характеристикой двигателя называется зависимость частоты вращения якоря n2 от момента на валу M2 при U = const и Iв = const.
Уравнение (11.6) является уравнением механической характеристики двигателя с параллельным возбуждением.
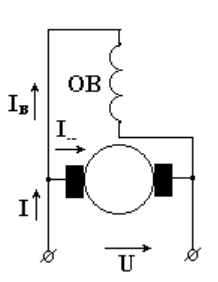
Рис. 11.14
Эта характеристика является жесткой. С увеличением нагрузки частота вращения такого двигателя уменьшается в небольшой степени (рис. 11.15).
1 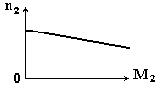 Рис.1.15
Рис.1.15
На рисунке 11.16 изображен двигатель последовательного возбуждения. Якорная обмотка и обмотка возбуждения включены последовательно.
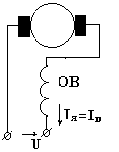 Рис. 11.16
Рис. 11.16
Ток возбуждения двигателя одновременно является током якоря. Магнитный поток индуктора пропорционален току якоря.

где k - коэффициент пропорциональности.
Момент на валу двигателя пропорционален квадрату тока якоря.

откуда
Механическая характеристика двигателя последовательного возбуждения является мягкой (рис. 11.17).
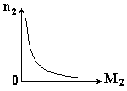
Рис. 11.17
Уравнение механической характеристики двигателя последовательного возбуждения выглядит следующим образом:
С увеличением нагрузки скорость двигателя резко падает.
С уменьшением нагрузки на валу двигатель развивает очень большую частоту вращения. Говорят, что двигатель идет вразнос. Работа двигателя последовательного возбуждения без нагрузки недопустима.
Двигатель смешанного возбуждения имеет механическую характеристику, представляющую собой нечто среднее между механическими характеристиками двигателя параллельного и последовательного возбуждения.
Двигатели с параллельным возбуждением применяются для привода станков и различных механизмов, требующих широкой регулировки скорости.
Двигатели с последовательным возбуждением применяются в качестве тяговых двигателей электровозов, трамваев и т.д.
35. Как создается вращающееся магнитное поле?
Особенностью многофазных систем является возможность создать в механически неподвижном устройстве вращающееся магнитное поле.
Катушка, подключенная к источнику переменного тока, образует пульсирующее магнитное поле, т.е. магнитное поле, изменяющееся по величине и направлению.
Возьмем цилиндр с внутренним диаметром D. На поверхности цилиндра разместим три катушки, пространственно смещенные относительно друг друга на 120o. Катушки подключим к источнику трехфазного напряжения (рис. 12.1). На рис. 12.2 показан график изменения мгновенных токов, образующих трехфазную систему.
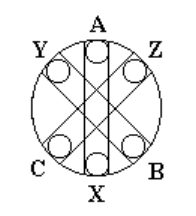
Рис. 12.1
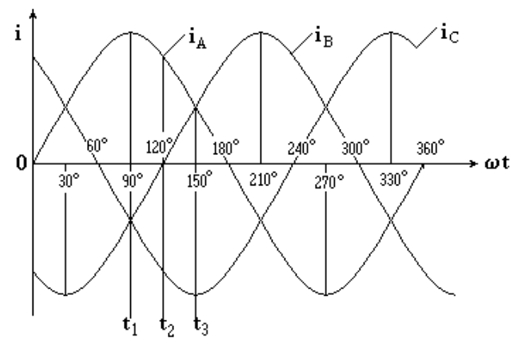
Рис. 12.2
Каждая из катушек создает пульсирующее магнитное поле. Магнитные поля катушек, взаимодействуя друг с другом, образуют результирующее вращающееся магнитное поле, характеризующееся вектором результирующей магнитной индукции 
На рис. 12.3 изображены векторы магнитной индукции каждой фазы и результирующий вектор  построенные для трех моментов времени t1, t2, t3. Положительные направления осей катушек обозначены +1, +2, +3.
построенные для трех моментов времени t1, t2, t3. Положительные направления осей катушек обозначены +1, +2, +3.
В момент t = t1 ток и магнитная индукция в катушке А-Х положительны и максимальны, в катушках В-Y и C-Z - одинаковы и отрицательны. Вектор результирующей магнитной индукции равен геометрической сумме векторов магнитных индукций катушек и совпадает с осью катушки А-Х. В момент t = t2 токи в катушках А-Х и С-Z одинаковы по величине и противоположны по направлению. Ток в фазе В равен нулю. Результирующий вектор магнитной индукции повернулся по часовой стрелке на 30o. В момент t = t3 токи в катушках А-Х и В-Y одинаковы по величине и положительны, ток в фазе C-Z максимален и отрицателен, вектор результирующего магнитного поля размещается в отрицательном направлении оси катушки С-Z. За период переменного тока вектор результирующего магнитного поля повернется на 360o.
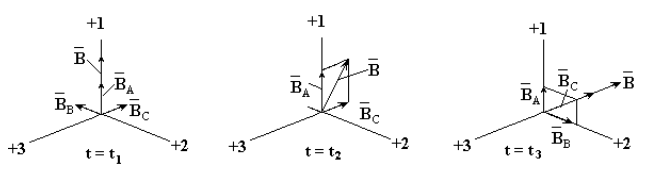
Рис. 12.3
Частота вращения магнитного поля или синхронная частота вращения
 (12.1)
(12.1)
где P- число пар полюсов.
Катушки, изображенные на рис. 12.1, создают двухполюсное магнитное поле, с числом полюсов 2Р = 2. Частота вращения поля равна 3000 об/мин.
Чтобы получить четырехполюсное магнитное поле, необходимо внутри цилиндра поместить шесть катушек, по две на каждую фазу. Тогда, согласно формуле (12.1), магнитное поле будет вращаться в два раза медленней, с n1 = 1500 об/мин.
Чтобы получить вращающееся магнитное поле, необходимо выполнить два условия.
1. Иметь хотя бы две пространственно смещенные катушки.
2. Подключить к катушкам несовпадающие по фазе токи.
36. Асинхронные двигатели.
Конструкция, принцип действия
Асинхронный двигатель имеет неподвижную часть, именуемую статором, и вращающуюся часть, называемую ротором. В статоре размещена обмотка, создающая вращающееся магнитное поле.
Различают асинхронные двигатели с короткозамкнутым и фазным ротором.
В пазах ротора с короткозамкнутой обмоткой размещены алюминиевые или медные стержни. По торцам стержни замкнуты алюминиевыми или медными кольцами. Статор и ротор набирают из листов электротехнической стали, чтобы уменьшить потери на вихревые токи.
Фазный ротор имеет трехфазную обмотку (для трехфазного двигателя). Концы фаз соединены в общий узел, а начала выведены к трем контактным кольцам, размещенным на валу. На кольца накладывают неподвижные контактные щетки. К щеткам подключают пусковой реостат. После пуска двигателя сопротивление пускового реостата плавно уменьшают до нуля.
Принцип действия асинхронного двигателя рассмотрим на модели, представленной на рисунке 12.4.
Вращающееся магнитное поле статора представим в виде постоянного магнита, вращающегося с синхронной частотой вращения n1.
В проводниках замкнутой обмотки ротора индуктируются токи. Полюса магнита перемещаются по часовой стрелке.
Наблюдателю, разместившемуся на вращающемся магните, кажется, что магнит неподвижен, а проводники роторной обмотки перемещаются против часовой стрелки.
Направления роторных токов, определенные по правилу правой руки, указаны на рис. 12.4.
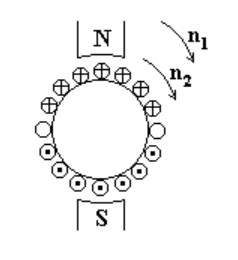
Рис. 12.4
Пользуясь правилом левой руки, найдем направление электромагнитных сил, действующих на ротор и заставляющих его вращаться. Ротор двигателя будет вращаться с частотой вращения n2 в направлении вращения поля статора.
Ротор вращается асинхронно т.е частота вращения его n2 меньше частоты вращения поля статора n1.
Относительная разность скоростей поля статора и ротора называется скольжением.
 . (12.2)
. (12.2)
Скольжение не может быть равным нулю, так как при одинаковых скоростях поля и ротора прекратилось бы наведение токов в роторе и, следовательно, отсутствовал бы электромагнитный вращающий момент.
Вращающий электромагнитный момент уравновешивается противодействующим тормозным моментом Мэм = М2.
С увеличением нагрузки на валу двигателя тормозной момент становится больше вращающего, и скольжение увеличивается. Вследствие этого, возрастают индуктированные в роторной обмотке ЭДС и токи. Вращающий момент увеличивается и становится равным тормозному моменту. Вращающий момент может возрастать с увеличением скольжения до определенного максимального значения, после чего при дальнейшем увеличении тормозного момента вращающий момент резко уменьшается, и двигатель останавливается.
Скольжение заторможенного двигателя равно единице. Говорят, что двигатель работает в режиме короткого замыкания.
Частота вращения ненагруженного асинхронного двигателя n2 приблизительно равна синхронной частоте n1. Скольжение ненагруженного двигателя S &asimp; 0. Говорят, что двигатель работает в режиме холостого хода.
Скольжение асинхронной машины, работающей в режиме двигателя, изменяется от нуля до единицы.
Асинхронная машина может работать в режиме генератора. Для этого ее ротор необходимо вращать сторонним двигателем в направлении вращения магнитного поля статора с частотой n2> n1. Скольжение асинхронного генератора. 
Асинхронная машина может работать в режиме электромашинного тормоза. Для этого необходимо ее ротор вращать в направлении, противоположном направлению вращения магнитного поля статора.
В этом режиме S > 1. Как правило, асинхронные машины используются в режиме двигателя. Асинхронный двигатель является наиболее распространенным в промышленности типом двигателя. Частота вращения поля в асинхронном двигателе жестко связана с частотой сети f1 и числом пар полюсов статора. При частоте f1 = 50 Гц существует следующий ряд частот вращения.
| P | ||||
| n1, об/мин | 3 000 |
Асинхронная машина с заторможенным ротором работает как трансформатор. Основной магнитный поток индуктирует в статорной и в неподвижной роторной обмотках ЭДС Е1 и Е2к.
 ;
;  ,
,
где Фm - максимальное значение основного магнитного потока, сцепленного со
статорной и роторной обмотками;
W1 и W2 - числа витков статорной и роторной обмоток;
f1 - частота напряжения в сети;
K01 и K02 - обмоточные коэффициенты статорной и роторной обмоток.
Чтобы получить более благоприятное распределение магнитной индукции в воздушном зазоре между статором и ротором, статорные и роторные обмотки не сосредоточивают в пределах одного полюса, а распределяют по окружностям статора и ротора. ЭДС распределенной обмотки меньше ЭДС сосредоточенной обмотки
Дата добавления: 2015-12-26; просмотров: 3242;