ОДНОКОВШОВЫЕ СТРОИТЕЛЬНЫЕ ЭКСКАВАТОРЫ
Строительными называют одноковшовые универсальные экскаваторы с основными ковшами вместимостью 0,25...2,5 м3, оснащаемые различными видами сменного рабочего оборудования. Строительные экскаваторы предназначены для земляных работ в грунтах I...IV категорий. С помощью унифицированного сменного рабочего оборудования (до 40 видов) они могут выполнять также погрузочно-разгрузочные, монтажные, сваебойные, планировочные, зачистные и другие работы.
Основными частями строительных экскаваторов являются гусеничное или пневмоколесное ходовое устройство, поворотная платформа (с размещенными на ней силовой установкой, механизмами, системой управления и кабиной машиниста) и сменное рабочее оборудование. Поворотная платформа опирается на ходовое устройство через унифицированный роликовый опорно-поворотный круг и может поворачиваться относительно него в горизонтальной плоскости.
Рабочий цикл одноковшового экскаватора при разработке грунтов состоит из следующих последовательно выполняемых операций:
копание грунта (заполнение ковша грунтом), подъем ковша с грунтом из забоя, поворот ковша к месту разгрузки, разгрузка грунта из ковша в отвал или в транспортные средства, поворот порожнего ковша к забою и опускание его в исходное положение для следующей операции копания .В процессе работы отдельные операции цикла можно совмещать (например, подъем или опускание ковша с поворотом его в забой), что позволяет сокращать продолжительность цикла.
Классификация
Одноковшовые строительные экскаваторы классифицируют по следующим признакам:
по типу ходового устройства — на гусеничные с нормальной и увеличенной опорной поверхностью гусениц, пневмоколесные, на специальном шасси автомобильного типа, на шасси грузового автомобиля или трактора;
по типу привода — с одномоторным (механическим и гидромеханическим) и многомоторным (гидравлическим и электрическим) приводом;
по исполнению опорно-поворотного устройства — на полноповоротные (угол поворота рабочего оборудования в плане не ограничен) и неполноповоротные (угол поворота рабочего оборудования в плане ограничен 270°);
по способу подвески рабочего оборудования — с гибкой подвеской на канатных полиспастах и с жесткой подвеской с помощью гидроцилиндров;
по виду исполнения рабочего оборудования — с шарнирно-рычажным и телескопическим рабочим оборудованием.
Кроме перечисленных признаков строительные экскаваторы различаются между собой размерами, массой, мощностью и вместимостью ковшей.
К основным параметрам одноковшовых экскаваторов относятся: вместимость ковша, продолжительность рабочего цикла, радиусы копания и выгрузки, высота и глубина копания, высота нагрузки, преодолеваемый экскаватором уклон пути, конструктивная и эксплуатационная массы машины, среднее давление на грунт у гусеничных машин и нагрузка на одно ходовое колесо у пневмоколесных, колея и база ходового устройства.
Индексация. Действующая система индексации предусматривает следующую структуру индекса), дающего более полную характеристику эксплуатационных возможностей машины.
ЭО – ОО ОО
Буквы ЭО означают — экскаватор одноковшовый универсальный.
Четыре основные цифры индекса (OO ОО) последовательно означают: ‑ размерную группу машины, ‑ тип ходового устройства, ‑ конструктивное исполнение рабочего оборудования (вид подвески) и ‑ порядковый номер данной модели.
Восемь размерных групп экскаваторов обозначаются цифрами с 1 по 8. Размер экскаватора характеризуют масса машины и мощность основного двигателя, а также геометрическая вместимость основного ковша. В настоящее время серийно выпускаются экскаваторы 2…6-й размерных групп. В стандартах на экскаваторы для каждой размерной группы обычно приводятся несколько вместимостей ковшей — основного и сменных повышенной вместимости, причем для последних предусмотрены меньшие линейные параметры и более слабые грунты, чем при работе с основным ковшом. Основным считается ковш, которым экскаватор может разрабатывать грунт IV категории на максимальных линейных рабочих параметрах (глубина и радиус копания, радиус и высота выгрузки и т. п.). Вместимость основных ковшей экскаваторов составляет: для 2-й размерной группы - 0,25... 0,28 м3; 3й-0,40...0,65 м3; 4-й - 0,65...1,00 м3; 5‑й-1,00...1,60 м3; 6-й - 1,60...2,50 м3; 7-й - 2.50...4.00 м3
Тип ходового устройства указывается цифрами с 1 по 9: 1 — гусеничное (Г); 2 —гусеничное уширенное (ГУ); 3 — пневмоколесное (П); 4 — специальное шасси автомобильного типа (СШ); 5 — шасси грузового автомобиля (А); 6 — шасси серийного трактора (Тр); 7 — прицепное ходовое устройство (Пр); 8,9 — резерв.
Конструктивное исполнение рабочего оборудования указывается цифрами: 1 (с гибкой подвеской), 2 (с жесткой подвеской), 3 (телескопическое).
Последняя цифра индекса означает порядковый номер модели экскаватора. Первая из дополнительных букв после цифрового индекса (А, Б, В и т. д.) означает порядковую модернизацию данной машины, последующие— вид специального климатического исполнения (С или ХЛ — северное, Т— тропическое, ТВ — для работы на влажных тропиках). Например, индекс ЭО-5123ХЛ расшифровывается так: экскаватор одноковшовый универсальный, 5-й размерной группы, на гусеничном ходовом устройстве, с жесткой подвеской рабочего оборудования, третья модель в северном исполнении. Экскаватор оборудуется основным ковшом вместимостью 1,0 м3, соответствующим 5-й размерной группе, и сменными вместимостью 1,25 и 1,6 м3.
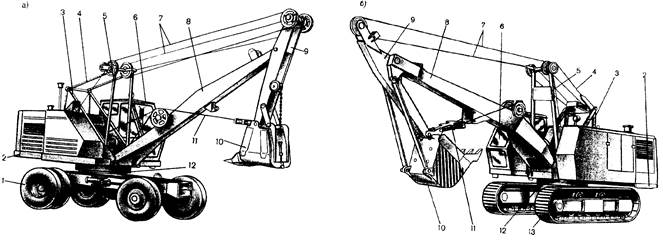 Рис.120. Строительные полноповоротные экскаваторы с механическим приводом и гибкой подвеской рабочего оборудования: а — пневмоколесный третьей размерной группы; б — гусеничный четвертой размерной группы; 1 — пневмоколесное ходовое устройство; 2 — поворотная платформа; 3 — двуногая стойка; 4 — стрелоподъемный канат; 5 — передняя стойка; 6 — кабина машиниста; 7 — подъемный канат; 8 — стрела; 9 — рукоять; 10 — ковш обратной лопаты; 11 ‑ тяговый канат; 12 — опорно-поворотное устройство; 13 — гусеничное ходовое устройство
Рис.120. Строительные полноповоротные экскаваторы с механическим приводом и гибкой подвеской рабочего оборудования: а — пневмоколесный третьей размерной группы; б — гусеничный четвертой размерной группы; 1 — пневмоколесное ходовое устройство; 2 — поворотная платформа; 3 — двуногая стойка; 4 — стрелоподъемный канат; 5 — передняя стойка; 6 — кабина машиниста; 7 — подъемный канат; 8 — стрела; 9 — рукоять; 10 — ковш обратной лопаты; 11 ‑ тяговый канат; 12 — опорно-поворотное устройство; 13 — гусеничное ходовое устройство
|
Экскаваторы с гибкой подвеской рабочего оборудования представляют собой полноповоротные машины (рис.120) с одномоторным я многомоторным (дизель-электрическим) приводом. На поворотной платформе таких машин смонтирована двуногая опорная стойка, несущая стрелоподъемный полиспаст. Промышленность выпускает строительные экскаваторы с одномоторным приводом 3...5 размерных групп, с многомоторным приводом — 6-й размерной группы.
Основными видами сменного рабочего оборудования таких экскаваторов являются прямая и обратная лопаты, драглайн, грейфер и кран. Кроме указанных видов экскаваторы оснащаются также оборудованием для погружения свай и шпунта, планировки и зачистки площадок и откосов, засыпки траншей, корчевания пней, рыхления мерзлых и скальных грунтов, взламывания дорожных покрытий, разрушения старых фундаментов зданий и стен и т.п.
Экскаватор с рабочим оборудованием прямой лопаты (рис.121,а) разрабатывает грунт в забое, расположенном выше уровня стоянки машины. В комплект оборудования прямой лопаты входят стрела 6, рукоять 4 с седловым подшипником, ковш 3 с открывающимся днищем, напорный механизм 5 (у экскаваторов 2-й и 3-й размерных групп напорный механизм отсутствует), полиспасты 7 и 2 подъема стрелы и ковша. Наполнение ковша происходит при подъеме его полиспастом 2 и выдвижении рукояти в сторону забоя напорным механизмом, регулирующим толщину стружки. Выгрузка ковша осуществляется открыванием его днища.
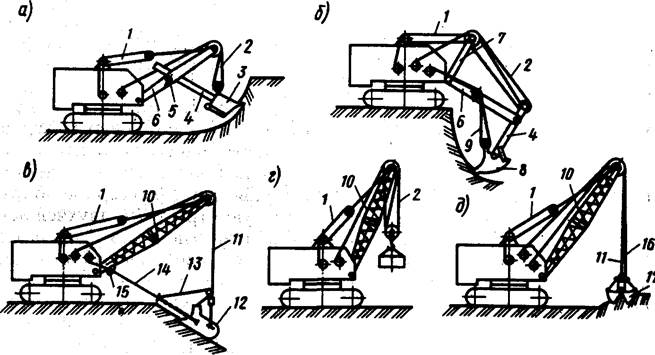 Рис.121. Основные виды сменного рабочего оборудования строительных экскаваторов с механическим приводом
Рис.121. Основные виды сменного рабочего оборудования строительных экскаваторов с механическим приводом
|
Экскаватор с оборудованием обратной лопаты (рис.121,б) предназначается для рытья траншей и небольших котлованов, расположенных ниже уровня его стоянки. Рабочее оборудование обратной лопаты состоит из ковша 8, рукояти 4, стрелы 6, передней стойки 7 и полиспастов: тягового 9, подъемного 2 и стрелового 1 (для удержания передней стойки). Наполнение ковша, врезаемого в грунт под действием веса рабочего оборудования, происходит при подтягивании его к экскаватору тяговым полиспастом 9 и одновременном ослаблении натяжения подъемного полиспаста 2. Выгрузка грунта из ковша осуществляется поворотом рукояти от забоя при ослаблении тягового полиспаста и подъеме рабочего оборудования подъемным полиспастом.
Экскаватор с оборудованием драглайна (рис.121,в) разрабатывает грунт ниже уровня своей стоянки и применяется для рытья котлованов, водоемов и траншей, а также для разработки различных выемок под водой а также для погрузки и разгрузки сыпучих и дробленых строительных материалов.. Драглайном называют рабочее оборудование одноковшового экскаватора с ковшом, подвешенным к стреле на подъемном канате и перемещаемым при копании грунта тяговым канатом. Драглайном принято также называть экскаватор с одноименным рабочим оборудованием. Сменное рабочее оборудование драглайна включает удлиненную решетчатую стрелу 10, специальный ковш совкового типа 12 с подъемными и тяговыми цепями, стрелоподъемный полиспаст 1, подъемный 11, тяговый 14 и разгрузочный (опрокидной) 13 канаты и механизм наводки (систему направляющих блоков 15) тягового каната. Наполнение ковша, прижимаемого к забою собственным весом, происходит при подтягивании его к экскаватору тяговым канатом 14. Выгрузка поднятого на необходимую высоту ковша осуществляется путем его поворота при ослаблении натяжения тягового и опрокидного канатов.
Мощные шагающие драглайны используют для добычи полезных ископаемых открытым способом и на вскрышных работах. Отечественная промышленность выпускает строительные драглайны с ковшами вместимостью 0,3...3 м3, а шагающие — с ковшами 5...100 м3.
Рабочее оборудование (рис.122) включает стрелу 10 обычно решетчатой (для строительных экскаваторов), реже вантовой (для шагающих драглайнов) конструкции, по длине значительно превышающую стрелу лопаты, и ковш 5, перемещаемый тяговым 6 и подъемным 2 канатами, с которыми он соединен посредством цепей 8 и 4. Тяговый канат направляется блочно-роликовым устройством 7 и навивается на барабан тяговой лебедки. Подъемный канат огибает головной блок 7 и навивается на барабан подъемной лебедки.
Грунт разрабатывают перемещением ковша тяговым канатом вдоль забоя (положения I, II, III, рис.123), после чего ковш поднимают подъемным канатом, подтягивая его к стреле (положение IV) и перемещая затем к ее головной части с одновременным поворотом платформы. При этих перемещениях ковш удерживается в положении, исключающем просыпание грунта, за счет разгрузочного каната 9 (рис.122), огибающего блок 3 и соединенного одним концом с тяговым канатом, а вторым — закрепленного на арке
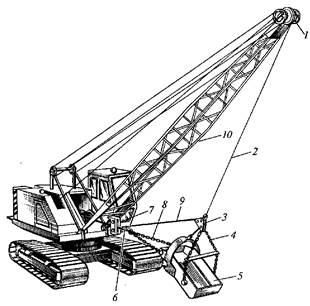 Рис. 122. Драглайн
Рис. 122. Драглайн
|
ковша. При разгрузке ковша отпускают тяговый канат, вследствие чего он опрокидывается зубьями вниз (положение V, рис.123). При пионерной выемке форма забоя определяется контуром ABCD или 'В'С'D при действии центробежных сил в процессе вращательного движения поворотной платформы. После отработки пионерной выемки экскаватор перемещают на новую позицию, с которой может быть разработана выемка с предельным контуром А'В"С"D" и т.д. до получения требуемой глубины Н. Предельное значение этого размера Нmax, а также радиуса копания Rmax ограничивается длиной стрелы и углом выходного (внутреннего) откоса.
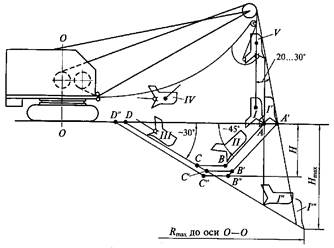 Рис.123. Рабочий процесс драглайна
Рис.123. Рабочий процесс драглайна
|
Драглайны работают преимущественно с разгрузкой в отвал. Разгрузка грунта в транспортное средство возможна, но она резко снижает производительность экскаватора из-за необходимости выполнять эту операцию после полной остановки поворотного движения и пониженных скоростей последнего во избежание раскачки ковша.
Для эффективной разработки различных по прочности грунтов петли для крепления к ковшу тяговых цепей делают переставными, устанавливая их в верхнее или нижнее положения при разработке соответственно легких и прочных грунтов. Такой регулировкой достигается определенная толщина стружки — большая для легких, меньшая — для прочных грунтов. В отличие от лопат, регулирующих толщину стружки напорным усилием, ковш драглайна лишен такой возможности — прижимающим его к забою является только нормальное усилие, являющееся частью его веса. При этом толщина стружки оказывается меньше, чем у лопат, в связи с чем для наполнения ковша соизмеримой с ковшами лопат вместимости требуется больший путь его перемещения по забою.
При переоборудовании строительного универсального одноковшового экскаватора с прямой лопаты на драглайн заменяют его рабочее оборудование, устанавливают направляющее блочно-роликовое устройство у пяты стрелы и переоборудуют напорный механизм в тяговый.
Мощные шагающие драглайны отличаются от описанных большими размерами и массой, индивидуальным приводом рабочих механизмов и ходовым оборудованием. Основные механизмы этих экскаваторов приводятся в движение электродвигателями постоянного тока, питаемыми от сети переменного тока высокого напряжения через сетевой двигатель переменного тока и генераторы постоянного тока.
Экскаватор с крановым оборудованием — экскаватор-кран (рис.121,г) используют на различных монтажных и погрузочно-разгрузочных работах. В комплект кранового оборудования входят удлиненная решетчатая стрела 10, стрелоподъемный 1 и грузовой 2 полиспасты, крюковая подвеска или специальные устройства для захвата грузов.
Экскаватор с грейферным оборудованием (рис.121,д) применяют при погрузке и выгрузке сыпучих и мелкокусковых материалов, очистке траншей и котлованов от обрушившегося грунта и снега, для рытья колодцев и узких глубоких котлованов в легких грунтах, а также для рытья траншей под водой. Грейферное оборудование включает удлиненную решетчатую стрелу 10, двухчелюстной грейферный ковш 17, подъемный 11 и замыкающий 16 канаты. Наполнение ковша происходит в результате смыкания его челюстей при натяжении замыкающего и ослаблении подъемного канатов. Разгрузка ковша осуществляется при ослаблении замыкающего каната.
В городском строительстве наиболее широко применяют полноповоротные строительные экскаваторы с механическим приводом 3...5 размерных групп на пневмоколесных и гусеничных ходовых устройствах. Основным рабочим оборудованием таких машин является обратная лопата.
Экскаваторы с гидравлическим приводом. Одноковшовые экскаваторы с гидравлическим приводом представляют собой многомоторные полно- и неполноповоротные машины с жесткой подвеской рабочего оборудования, у которых для передачи мощности от двигателя к рабочим механизмам используется гидравлический объемный привод. По сравнению с механическими гидравлические экскаваторы имеют более широкую номенклатуру сменных рабочих органов, число которых постоянно растет, большее количество основных и вспомогательных движений рабочего оборудования, что значительно расширяет их технологические возможности и обеспечивает высокий уровень механизации земляных работ, особенно в стесненных условиях городской застройки.
Различают гидравлические экскаваторы с шарнирно-рычажным (рис.124,а, б) и телескопическим (рис.124,в) рабочим оборудованием, для удержания и приведения в действие которого используют жесткие связи — гидравлические цилиндры. Основными рабочими движениями шарнирно-рычажного оборудования являются изменение угла наклона стрелы, поворот рукояти с ковшом относительно стрелы и поворот ковша относительно рукояти, телескопического — выдвижение и втягивание телескопической стрелы.
Гидравлические полноповоротные экскаваторы с шарнирно-рычажным рабочим оборудованием созданы на базе единых конструктивных схем, широкой унификации агрегатов и узлов и серийно выпускаются 3...6-й размерных групп. Привод сменного рабочего оборудования таких экскаваторов осуществляется от гидроцилиндров двустороннего действия, а поворот платформы и передвижение машины— от индивидуальных гидромоторов. К основным видам сменного рабочего оборудования относятся прямая и обратная лопаты, грейфер и погрузчик.
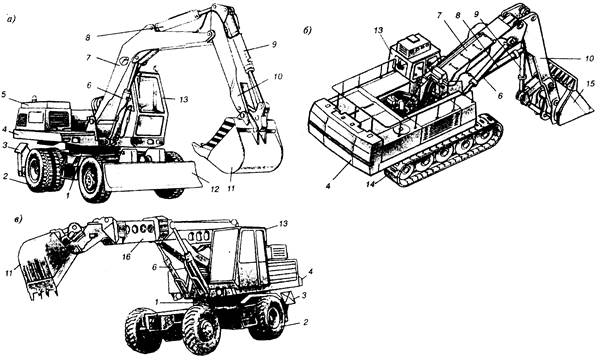 Рис.124. Одноковшовые гидравлические полноповоротные экскаваторы с жесткой подвеской рабочего оборудования: а, б — шарнирно-рычажного; в — телескопического; 1 — опорно-поворотное устройство; 2 — пневмоколесное ходовое устройство; 3 — выносная опора; 4 — поворотная платформа; 5 — силовая установка; 6, 8, 9 ‑ гидроцилиндры стрелы; 7 — стрела; 10 — рукоять; 11 ‑ ковш обратной лопаты; 12 — бульдозерный отвал; 13 — кабина машиниста; 14 — гусеничное ходовое устройство; 15 — ковш прямой лопаты; 16 — телескопическая стрела
Рис.124. Одноковшовые гидравлические полноповоротные экскаваторы с жесткой подвеской рабочего оборудования: а, б — шарнирно-рычажного; в — телескопического; 1 — опорно-поворотное устройство; 2 — пневмоколесное ходовое устройство; 3 — выносная опора; 4 — поворотная платформа; 5 — силовая установка; 6, 8, 9 ‑ гидроцилиндры стрелы; 7 — стрела; 10 — рукоять; 11 ‑ ковш обратной лопаты; 12 — бульдозерный отвал; 13 — кабина машиниста; 14 — гусеничное ходовое устройство; 15 — ковш прямой лопаты; 16 — телескопическая стрела
|
В качестве сменных рабочих органов гидравлических экскаваторов при выполнении обычных земляных работ используют ковши 1...3 обратных (рис.125) и прямых 4 лопат различной вместимости, ковши для дренажных работ 5 и рытья узких траншей 6, ковши с зубьями и со сплошной режущей кромкой для планировочных 7 и зачистных 8 работ, двухчелюстные грейферы для рытья траншей и котлованов 9 ипогрузки крупнокусковых материалов и камней 10, погрузочные ковши большой вместимости для погрузочных работ 11...13, бульдозерные отвалы 14 для засыпки ям, траншей и небольших котлованов, захваты для погрузки труб и бревен 15, крановую подвеску 16 для различных грузоподъемных и монтажных работ, многозубые 17 и однозубые 18 рыхлители для рыхления мерзлых и плотных грунтов и взламывания асфальтовых покрытий, пневматические, гидравлические 19 и гидропневматические 20 молоты многоцелевого назначения со сменными рабочими инструментами для разрушения скальных и мерзлых грунтов, железобетонных конструкций, кирпичной кладки и фундаментов, дорожных покрытий, дробления негабаритов горных пород, трамбования грунтов, погружения свай и шпунта, бурами для бурения шпуров и скважин и т. п. В комплект оборудования обратной лопаты (рис.126,а) входят: стрела (моноблочная Г‑образной формы или составная 1, 6 изменяемой длины), рукоять 5, поворотный ковш 4 и гидроцилиндры 2, 3, 8 подъема стрелы, поворота рукояти и ковша. Копание грунта производят поворотом ковша относительно рукояти и поворотом рукояти относительно стрелы. Копание можно осуществлять только поворотом ковша относительно неподвижной рукояти, что позволяет вести работы в стесненных условиях, а также в непосредственной близости от подземных коммуникаций.
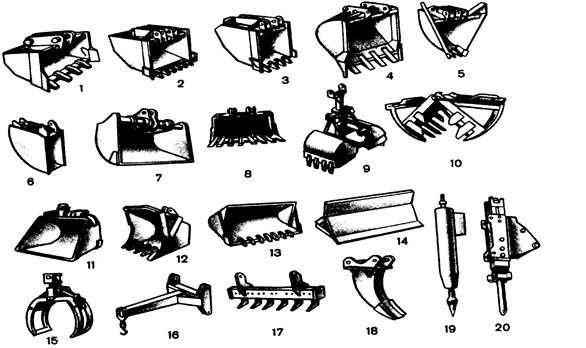 Рис.125. Сменные рабочие органы гидравлических экскаваторов
Рис.125. Сменные рабочие органы гидравлических экскаваторов
|
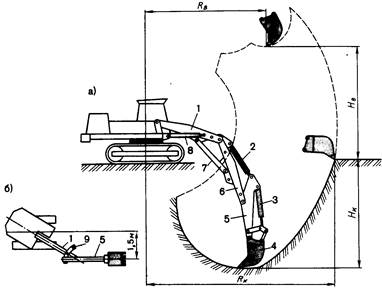 Рис.126. Рабочее оборудование обратной лопаты
Рис.126. Рабочее оборудование обратной лопаты
|
Поворотом ковша производят не только копание, но и выгрузку грунта, а также зачистку основания забоя. Толщину срезаемой при копании стружки регулируют путем подъема или опускания стрелы. Составная стрела дает возможность изменять глубину Hк и радиус Rк копания (а также высоту выгрузки Hв) что в сочетании со сменными профильными ковшами различной вместимости позволяет расширить область применений экскаватора и использовать его с максимальной производительностью в различных грунтовых условиях.
Основная 1 и удлиняющая 6 части составной стрелы соединены шарниром и тягой 7, установкой которой в различные положения на удлиняющей части достигается изменение длины стрелы. На основную часть стрелы устанавливают оборудование прямой лопаты, грейфера и погрузчика. При работе вблизи фундаментов зданий и других сооружений, а также при копании траншей, ось которых не совпадает с продольной осью экскаватора, в оборудовании обратной лопаты применяют специальную промежуточную вставку 9 (рис.126,б), позволяющую устанавливать рукоять 5 с гидроцилиндром под углом в плане к продольной оси стрелы 7. Вставка обеспечивает смещение оси копания до 1,5 м относительно продольной оси машины. Оборудование со смещенной осью копания является одним из преимуществ гидравлических экскаваторов.
Прямая лопата с поворотным ковшом широко применяется на экскаваторах 4...6-й размерных групп и предназначена для разработки грунта как выше (преимущественно), так и ниже уровня стоянки машины, а также для погрузочных работ. Оборудование прямой лопаты включает (рис.127): стрелу 1, рукоять 2, ковш 3 и гидроцилиндры 4, 5, 6 подъема стрелы, поворота рукояти и ковша. Копание грунта осуществляется поворотом рукояти и ковша, движущегося от машины в сторону забоя. Толщину стружки регулируют подъемом или опусканием стрелы. При разгрузке ковш поворачивают гидроцилиндром 4. Прямой лопатой с поворотным ковшом можно производить планирование и зачистку основания забоя.
Погрузчик применяют для погрузки сыпучих и мелкокусковых материалов выше стоянки экскаватора, разработки и погрузки в транспортные средства (или отсыпки в отвал) грунтов 1...11 категорий, а также планировочных работ на уровне стоянки машины. Вместимость ковша погрузчика в 1,5...2 раза больше вместимости ковша обратной лопаты, что значительно повышает производительность экскаватора при использовании его на погрузочных работах.
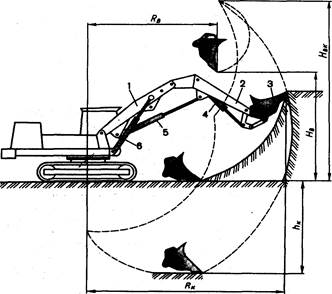 Рис.127. Рабочее оборудование прямой лопаты
Рис.127. Рабочее оборудование прямой лопаты
|
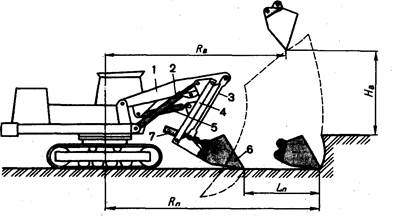 Рис.128. Рабочее оборудование погрузчика
Рис.128. Рабочее оборудование погрузчика
|
В комплект погрузочного оборудования (рис.128) входят: стрела 1, рукоять 4, ковш 3 и гидроцилиндры 2, 5, 7 подъема стрелы, поворота рукояти и ковша. Кинематическая схема погрузчика обеспечивает горизонтальное движение ковша от экскаватора при внедрении его в грунт или штабель материала и планировочных работах. После внедрения в разрабатываемый материал возможен поворот ковша для лучшего его заполнения гидроцилиндром 2, которым поворачивают поднятый на заданную высоту ковш при разгрузке.
Грейфер (рис.129) применяют для рытья котлованов, траншей, колодцев и при погрузочно-разгрузочных работах. Особенно эффективно использование такого оборудования при копании глубоких выемок, а
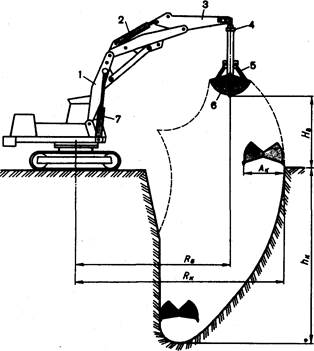 Рис.129. Рабочее оборудование грейфера
Рис.129. Рабочее оборудование грейфера
|
также в стесненных условиях. На гидравлических экскаваторах устанавливают жестко подвешенные грейферы у которых необходимое давление на грунт при врезании создается принудительно с помощью гидроцилиндров рабочего оборудования. Это позволяет эффективно разрабатывать плотные грунты независимо от массы грейфера. Грейфер шарнирно крепят к рукояти обратной лопаты вместо ковша таким образом, чтобы было возможно его продольное и поперечное раскачивание. Оборудование грейфера (рис.129) состоит из составной стрелы 1, рукояти 3 и гидроцилиндров 2, 7, используемых от обратной лопаты, двухчелюстного грейферного ковша б с гидроцилиндрами 5 для замыкания и открывания челюстей и механизмом 4 поворота ковша в плане. Челюсти ковша в исходном положении раскрыты. Наполнение его происходит при смыкании челюстей гидроцилиндрами 5. Необходимое напорное усилие создается опусканием стрелы. Разгружают ковш размыканием челюстей. Для глубокого копания колодцев до 30 м,
траншей и котлованов в оборудовании грейфера используют удлиняющие промежуточные вставки.
Грейферное оборудование на напорной штанге (рис.129) применяют для разработки узких и глубоких (до 20 м) траншей с вертикальными стенками в грунтах I...IV категорий с каменистыми включениями размером до 200 мм при возведении подземных сооружений способом «стена в грунте», а также для разработки выемок под сваи в промышленном, городском и сельском строительстве.
Способом «стена в грунте» можно возводить без отрывки котлована подземную часть промышленных и гражданских зданий и сооружений, стены насосных станций, тоннели метрополитенов неглубокого заложения, колодцы коллекторов, борта каналов и т.п.
Грейферное оборудование устанавливают на базовой части стрелы экскаваторов 5-ой размерной группы и включает в себя напорную штангу 5, грейферный ковш 3, направляющий корпус 4 с механизмом перемещения штанги, рычажный механизм 2, гидроцилиндры подъема-опускания штанги и наклона штанги в поперечной плоскости. Направляющий корпус шарнирно соединен с кронштейном, относительно которого может быть повернут двумя гидроцилиндрами в вертикальной плоскости на угол 90° вдоль продольной оси экскаватора. Дополнительным гидроцилиндром 7 штанга может быть наклонена в поперечной плоскости на угол γ в обе стороны от вертикали. Рабочим органом оборудования является гидравлический двухчелюстной грейфер (рис.130,б) с приводом сменных челюстей полукруглой формы от двух гидроцилиндров 10, расположенных внутри его корпуса. Режущие кромки челюстей снабжены сменными зубьями, а боковые стенки — резцами с износостойкой наплавкой. Грейфер крепится к напорной штанге, перемещаемой канатным механизмом, смонтированным на направляющем корпусе. Механизм перемещения (подъема-опускания) штанги состоит из двух унифицированных лебедок, каждая из которых включает барабан 13 для перематывания напорно-возвратного каната 14, трехступенчатый цилиндрический редуктор 12 (аналогичный редуктору механизма передвижения экскаватора), тормоз и гидромотор 11. Напорное движение на грейфер создается весом штанги с грейфером и лебедками.
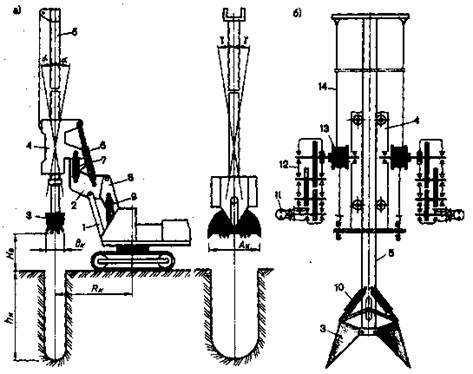 Рис.130. Грейферное оборудование для возведения сооружений методом «стена в грунте»: а — общий вид; б — кинематическая схема механизма перемещения штанги
Рис.130. Грейферное оборудование для возведения сооружений методом «стена в грунте»: а — общий вид; б — кинематическая схема механизма перемещения штанги
|
Рычажный механизм 2 (рис.130,а) жестко крепится к базовой части стрелы и через упорную стойку 1 к пяте стрелы 8. В процессе работы упорная стойка воспринимает нагрузки от рабочего оборудования. Перевод рабочего оборудования из рабочего положения в транспортное обеспечивается поворотом гидроцилиндрами 6 направляющего корпуса 4, со штангой назад на 90° при одновременном опускании вперед гидроцилиндрами 9 базовой части стрелы с кронштейном и упорной стойкой 1. Вертикальное положение оборудования контролируется прибором, датчики которого установлены на направляющем корпусе, а указатели - в кабине машиниста. Гидросистема грейферного оборудования питается от насосной установки базового экскаватора. Управление грейферным оборудованием гидравлическое и осуществляется из кабины машиниста.
Гидравлические молоты навешиваются на экскаваторы 2...5-й размерных групп вместо ковша обратной лопаты и соединяются с рукоятью посредством быстросъемного крепления. Экскаватор, оборудованный гидромолотом с рабочим инструментом в виде клина, пики и трамбовки, можно применять при рыхлении мерзлого грунта, дроблении негабаритов твердых и горных пород, взламывании мерзлого грунта и дорожных покрытий, кирпичных и бетонных фундаментов и других работах, а также для уплотнения грунта. При разработке грунта можно изменять угол наклона гидромолота к поверхности грунта. В комплект оборудования гидромолота (рис.131) входят: стрела 1, рукоять 4, гидромолот 5 и гидроцилиндры 2, 3. 6 подъема .стрелы, поворота рукояти и молота.
Гидромолоты приводятся в действие от насосов гидросистемы базового экскаватора, что обеспечивает лучшее использование установленной мощности и снижение эксплуатационных затрат. По принципу работы гидромолоты аналогичны паровоздушным. Гидромолоты создают значительные импульсы силы направленного действия, и обеспечивают наименьшую энергоемкость процесса разработки мерзлых грунтов и разрушения твердых покрытий. Различают гидромолоты простого и двойного действия. В гидромолотах двойного действия подъем ударной части (холостой ход) осуществляется под давлением рабочей жидкости, а разгон ее вниз при рабочем ходе - под действием собственного веса и энергии рабочей жидкости или сжатого газа, накопленной во время холостого хода в гидравлическом или пневматическом аккумуляторе. Молоты с пневмоаккумулятором называют также гидропневматическими. В конструкцию молота с гидроаккумулятором (рис.132) входят: рабочий цилиндр 6 с распределительным золотником 10, гидроаккумулятором 13 и насосом 12, корпус с направляющей трубой 2, ударная часть 3 и сменный рабочий инструмент 1.
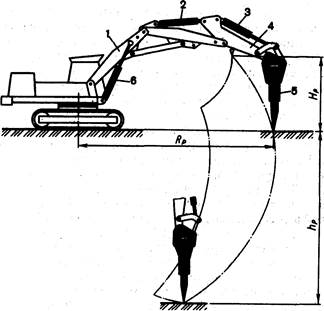 Рис.131. Рабочее оборудование гидромолота
Рис.131. Рабочее оборудование гидромолота
| 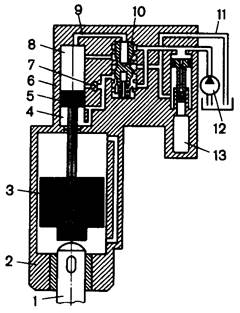 Рис.132. Гидромолот с гидроаккумулятором
Рис.132. Гидромолот с гидроаккумулятором
|
Цикл работы гидромолота состоит из разгона ударной части вверх, торможения ее перед верхней мертвой точкой, разгона вниз и удара по хвостовику инструмента. Ударная часть не имеет участков установившегося движения. При разгоне вверх рабочая жидкость от насоса 12 через золотник 10 поступает в штоковую полость 4 рабочего цилиндра 6 и в гидроаккумулятор 13, где происходит ее накапливание. В конце разгона золотник соединяет поршневую полость 8 рабочего цилиндра с напорной линией 9, в результате чего происходит торможение ударной части и рабочая жидкость вытесняется в гидроаккумулятор. После остановки ударной части в верхней мертвой точке начинается ее разгон вниз под действием собственного веса и давления рабочей жидкости, действующего на поршень 5. Когда ударная часть достигает скорости, которую она имела бы при установившемся движении, аккумулятор начинает разряжаться, отдавая накопленную жидкость в рабочий цилиндр 6. В конце хода вниз ударная часть наносит удар по хвостовику сменного рабочего инструмента 1. Перед нанесением удара через обратный клапан 7 жидкость из поршневой полости 9 поступает в сливную магистраль 11. Далее цикл повторяется.
Молоты с гидроаккумулятором просты в управлении и обслуживании, имеют довольно высокий КПД (0,55...0,65). Они издают при работе слабый шум, поэтому их можно использовать в густонаселенных местах. Гидравлические молоты развивают энергию удара 1800... 9000 Дж, имеют частоту ударов 2,2...5 Гц, массу ударной части 100...600 кг, рабочее давление в гидросистеме 10...16 мПа.
У гидропневматических молотов (рис.133) давление рабочей жидкости воздействует на боек при рабочем и холостом ходах. Одновременное воздействие на боек давления жидкости и энергии газа аккумулятора при рабочем ходе позволяет повысить коэффициент использования мощности насосной установки, снизить пульсацию давления рабочей жидкости, улучшить технико-эксплуатационные показатели молотов. Основными элементами гидропневматического молота являются: ударный блок 6,
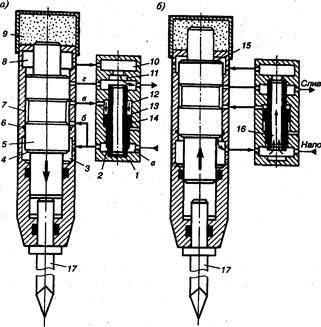 Рис.133. Гидропневматический молот
Рис.133. Гидропневматический молот
|
пневмоаккумулятор 9, управляющая камера 7, распределитель 1, сменный рабочий инструмент 17.
Принцип работы молота заключается в следующем. В исходном положении (рис.133,а) рабочая жидкость под напорным давлением подается в полость а распределителя 1 и одновременно в камеру взвода 3, управляющую камеру 7 ударного блока 6 и через каналы 6 и в полость 12 золотника 14. Напорное давление действует на ступень 13 золотника, перемещая его в крайнее нижнее положение, и на ступень 4 бойка 5, который начинает двигаться вверх (холостой ход), сжимая газ в аккумуляторе 9. При этом рабочая жидкость из камеры рабочего хода 8 вытесняется через камеру 10 золотника в слив.
В верхнем положении бойка (рис.133,б) управляющая камера соединяет каналы виг между собой и одновременно полость 12 со сливом. Под действием давления рабочей жидкости на нижнюю ступень 2 золотника последний перемещается вверх, верхней своей частью входит в проточку 11 корпуса распределителя, перекрывает сливную гидролинию и через центральное отверстие 16 соединяет напорную гидролинию с камерой взвода 3 и камерой рабочего хода 8. Боек начинает движение вниз (рабочий ход) под одновременным воздействием давления газа аккумулятора и рабочей жидкости (площадь ступени 15 больше площади ступени 13); рабочая жидкость переливается из полости взвода в камеру рабочего хода. Разгоняясь, боек наносит удар по инструменту 17 управляющая полость соединяет каналы б и в с напорной гидролинией, и золотник перебрасывается вниз. Далее цикл повторяется.
Гидромолоты могут быть использованы по двум технологическим схемам: 1) экскаватор с молотом работает непрерывно, а выемка грунта осуществляется другим экскаватором; 2) экскаватор с молотом выполняет заданную часть работы, а затем производится замена молота ковшом.
При работе с молотами стрела экскаватора устанавливается в плавающее положение, что обеспечивает полную виброизоляцию рабочего места машиниста. Молоты комплектуются широкой номенклатурой легко сменяемых рыхлительных, дробящих, сваебойных, трамбующих инструментов и запускаются в работу автоматически при опирании с определенным усилием рабочего инструмента на разрушаемый (забиваемый) объект.
Гидропневматические молоты развивают энергию удара 500...9000 Дж, имеют частоту ударов 3,5...12 Гц. Давление зарядки газового аккумулятора 0,6...1,2 мПа, рабочее давление в гидросистеме 10...16 мПа.
Неполноповоротные гидравлические универсальные экскаваторы с шарнирно-рычажным рабочим оборудованием относятся к машинам 2-й размерной группы и монтируются на базе серийных пневмоколесных тракторов класса 1, 4. Они представляют собой мобильные универсальные малогабаритные землеройные машины с экскаваторным, погрузочным и бульдозерным оборудованием для выполнения земляных (в грунтах I...Ш категорий) и погрузочных работ небольших объемов на рассредоточенных объектах. Наиболее эффективно такие экскаваторы применяются в стесненных условиях. Основным рабочим органом неполноповоротных экскаваторов служит унифицированный ковш9 (рис.15) прямой и обратной лопат вместимостью 0,25 м3, входящий вместе со стрелой 11, рукоятью 10, тягами 8 и гидроцилиндрами 5...7 подъема стрелы, поворота рукояти и ковша в комплект экскаваторного оборудования машины. Это оборудование монтируется на поворотной колонне 4, установленной на
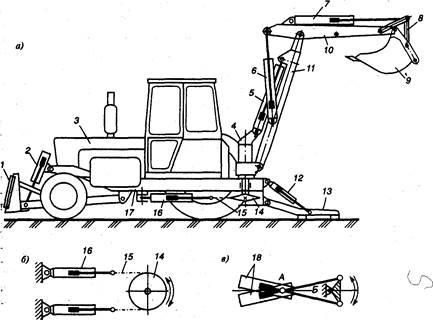 Рис.134. Неполноповоротный гидравлический экскаватор второй размерной группы: а — общий вид; б и в — схемы поворотных механизмов
Рис.134. Неполноповоротный гидравлический экскаватор второй размерной группы: а — общий вид; б и в — схемы поворотных механизмов
|
усиленной раме 17 базового трактора 3. Поворот колонны с рабочим оборудованием вокруг вертикальной оси в плане на 180° обеспечивается: цепным поворотным механизмом, состоящим из двух попеременно работающих гидроцилиндров 16 (рис.134,б), втулочно-роликовой цепи 15 и звездочки 14, жестко закрепленной на валу поворотной колонны или двумя гидроцилиндрами 18 (рис.134,в), имеющими возможность поворачиваться относительно шарнира А, штоки которых шарнирно соединены с сектором Б поворотной колонны.
Устойчивость экскаватора при работе обеспечивается двумя выносными опорами 13, управляемыми гидроцилиндрами 12 с гидрозамками. Спереди трактора навешен неповоротный бульдозерный отвал 1, управляемый гидроцилиндром 2.
Малогабаритные экскаваторы представляют собой небольшие по массе и размерам высокомобильные универсальные машины малой мощности, оснащенные быстросъемными сменными рабочими органами многоцелевого назначения. С помощью таких машин отрывают небольшие котлованы и траншеи для оснований фундаментов зданий и сооружений, канавы у дорог и скважины для ограждений, опор, линий электропередач и других объектов, траншеи для водопроводной, газораспределительной, электрической и телефонной сети; осуществляют строительство бассейнов, очистных сооружений; ремонт и реконструкцию гражданских и промышленных сооружений; разрушают железобетонные и другие изделия при строительстве и ремонте различных объектов; обустраивают парки, скверы, спортивные площадки; выполняют самые различные операции технологических процессов в коммунальном хозяйстве.
Небольшие габаритные размеры, малое давление на опорную поверхность, высокая маневренность и проходимость позволяют успешно использовать такие экскаваторы в подвалах и на этажах промышленных зданий, внутри вагонов и в других труднодоступных местах, в том числе на работах, связанных с поддержанием работоспособности готовых объектов, с их обслуживанием и ремонтом. Использование экскаваторов оправдано при выполнении работ небольших объемов на рассредоточенных объектах, благодаря возможности их перебазирования в кузове грузовых автомобилей, а также установки на ограниченную в размерах площадку (на возвышенности и в котлованах), что недоступно для более крупных машин.
Малогабаритные экскаваторы делят на две группы: мини-экскаваторы массой 1200...6000 кг (вместимость ковша до 0,25 м3) и микроэкскаваторы массой до 1200 кг (вместимость ковша 0,01...0,04 м3).
Мини-экскаваторы — это самоходные полу- и полноповоротные машины с традиционным шарнирно-рычажным рабочим оборудованием и гидравлическим приводом, которые базируются на специальных и тракторных шасси с колесным и гусеничным ходовым устройством. Они обеспечивают глубину копания 2,5...3,8 м, высоту выгрузки 2,8...5 м. Основное рабочее оборудование — обратная лопата, дополнительное — рыхлитель, гидромолот, гидробур, грейфер, крюковая подвеска, погрузочный ковш, захват для бордюрного камня, бульдозерный отвал и т.п.
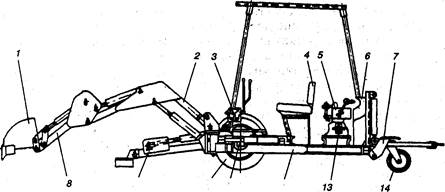
Микроэкскаваторы выполняются на базе самоходных колесных шасси, мотоблоков, а также прицепными и без привода хода. Угол поворота рабочего оборудования в плане 130...170°. Глубина копания и высота выгрузки 1,7—2 м. Микроэкскаватор (рис135) состоит из несущей рамы 12, пневмоколесного ходового устройства, шарнирно-рычажного рабочего оборудования, гидропривода, сиденья машиниста 4 и силовой установки 5. Рабочее оборудование крепится к раме с помощью двойного шарнира, при горизонтальном положении которого обеспечиваются наклоны стрелы с рукоятью и ковшом, а при вертикальном — поворот рабочего оборудования в плане на угол ±85° относительно продольной оси
 9 10 11 12
Рис.135. Микроэкскаватор
9 10 11 12
Рис.135. Микроэкскаватор
|
машины. Устойчивость экскаватора обеспечивается при работе гидроуправляемыми передними опорами 9 и задним упором 7.
Ходовое устройство включает два передних ведущих колеса 10 с индивидуальным приводом каждого от гидромоторов 11 и два ведомых задних 14. Гидропривод экскаватора включает гидробак 6, шестеренный насос 13, секционные распределители 3, гидроцилиндры рабочего оборудования и откидных опор, гидромоторы ходовых колес. При одновременном вращении ведущих колес в разных направлениях осуществляется поворот машины на месте, что обеспечивает высокую маневренность экскаватора в стесненных условиях. Рабочее оборудование включает стрелу 2, рукоять 8, ковш 1 и гидроцилиндры для их перемещения.
Управление рабочим оборудованием и откидными опорами осуществляется с рабочего места 4 машиниста с помощью гидрораспределителей 3.
Кроме основного ковша обратной лопаты вместимостью 0,03 м3 для разработки грунтов I…II категории машина оснащается ковшом с эластичным днищем и боковыми стенками, для разработки грунтов повышенной влажности — ковшом с цепным днищем с повышенным коэффициентом разгрузки, челюстным грейфером вместимостью 0,05 м3 с рыхлителем, гидромолотом с энергией удара 150 Дж, ножницами для резки арматуры, клещевым захватом для укладки бордюрного камня, крюковой подвеской грузоподъемностью 100 кг. Экскаватор перевозят в кузове грузового автомобиля.
Экскаваторы с телескопическим рабочим оборудованием (экскаваторы-планировщики) представляют собой полно- и неполноповоротные машины 3-й размерной группы с телескопической стрелой на пневмоколесном и гусеничном ходовом устройстве, основным рабочим движением которых является выдвижение и втягивание телескопической стрелы при копании, планировании и транспортировании грунта в ковше после экскавации. Эти машины разрабатывают грунты I...IV категории и характеризуются малой габаритной высотой, что позволяет эффективно использовать их в стесненных условиях городской застройки, в труднодоступных местах и закрытых помещениях, в частности для разработки грунта под мостами, на участках пересечения коммуникаций, для зачистки дна и вертикальных стенок траншей и котлованов; подсыпки и разравнивания грунта под полы; фундаменты и подпольные каналы; засыпки пазух фундаментов, траншей и котлованов; подачи материалов через проемы в стенах под низкое перекрытие и т. п.
Экскаваторы с телескопическим рабочим оборудованием широко применяют на рассредоточенных объектах малого объема как универсальные землеройные машины. Наиболее эффективно они используются при планировании наклонных поверхностей каналов, насыпей и выемок земляного полотна, расположенных ниже уровня стоянки экскаватора. Поэтому их обычно называют экскаваторами-планировщиками.
Основными частями экскаваторов-планировщиков (рис.136) являются: ходовое устройство, поворотная платформа (с расположенными на ней силовой установкой, узлами гидропривода, кабиной машиниста) и телескопическое рабочее оборудование. Поворотная платформа опирается на раму ходового оборудования через роликовое опорно-поворотное устройство. Полноповоротные экскаваторы выпускают на гусеничном и пневмоколесном ходовых устройствах, неполноповоротные (угол поворота стрелы в плане180...2700) - на шасси автомобильного типа. телескопическое рабочее оборудование отечественных экскаваторов имеет принципиальную единую схему и состоит из телескопической стрелы треугольного или квадратного сечения, сменного рабочего органа и механизмов выдвижения (втягивания) стрелы, подъема (опускания) стрелы, поворота ковша относительно собственной оси и продольной оси стрелы. Телескопическая стрела включает две секции — наружную 2, шарнирно прикрепляемую к поворотной платформе, и выдвижную внутреннюю 4, несущую на переднем конце сменный рабочий орган 6. Гидравлический привод рабочего оборудования обеспечивает прямолинейное движение рабочего органа при изменении длины телескопической стрелы (ход стрелы до 3,2 м) с помощью длинноходового гидроцилиндра 3, подъем (на угол до 25°) и опускание (на угол до 50°) стрелы, в вертикальной плоскости двумя параллельно установленными гидроцилиндрами 1,поворот ковша относительно оси; его подвески (на угол до 120°) гидроцилиндром 5 и вокруг продольной оси стрелы гидроцилиндром 7. У некоторых моделей экскаваторов угол поворота стрелы достигает ±180°, что позволяет использовать рабочие органы двустороннего действия, например ковш с однозубым рыхлителем или ковш с зубьями, расположенными с двух сторон. Основными видами сменного рабочего оборудования экскаваторов-планировщиков (рис.137) являются ковши вместимостью 0,25, 0,4 и 0,65 м3, планировочные 2 и
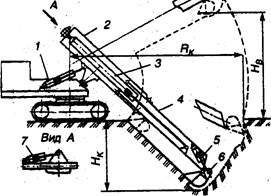 Рис.136. Принципиальная схема экскаватора с телескопическим рабочим оборудованием
Рис.136. Принципиальная схема экскаватора с телескопическим рабочим оборудованием
| 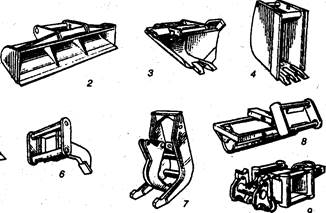 Рис.137. Сменные рабочие органы экскаваторов-планировщиков
Рис.137. Сменные рабочие органы экскаваторов-планировщиков
|
профилировочные 3, ковши для дренажных работ 4, планировочный отвал 5, рыхлитель 6, клещи для камней 7, уплотняющий каток 8, приспособление для бокового копания 9 и др. Широкая номенклатура сменных [рабочих органов и конструктивные особенности телескопического оборудования обеспечивают практически полную механизацию экскавационных, планировочных, зачистных, доводочных и погрузочно-разгрузочных работ в стесненных условиях, большинство которых не может быть выполнено (частично или полностью) универсальными одноковшовыми экскаваторами с жесткой или канатной подвеской рабочего оборудования.
Выполнение основных видов земляных работ осуществляется следующими движениями стрелы и ковша:
• планирование и зачистка наклонных поверхностей, расположенных ниже уровня стоянки машины — втягиванием телескопической стрелы с коррекцией толщины срезаемой стружки небольшим поворотом ковша;
• зачистка и планирование горизонтальных поверхностей на уровне и ниже уровня стоянки экскаватора — совмещением опускания и втягивания стрелы с периодической коррекцией положения ковша;
• зачистка и доводка боковых (наклонных и вертикальных) поверхностей земляных сооружений при расположении экскаватора вдоль оси сооружения (например, в траншеях) — втягиванием телескопической стрелы и поворотом рабочего органа относительно продольной оси стрелы на некоторый угол.
Гидропривод экскаваторов-планировщиков включает сдвоенный насос, два золотниковых гидрораспределителя, гидромоторы и гидроцилиндры. Гидросистема обеспечивает совмещение трех из пяти рабочих движений при планировочных работах — выдвижение (втягивание) стрелы, ее подъем (опускание) и поворот платформы.
Отечественные экскаваторы-планировщики характеризуются наибольшей глубиной копания (с удлинителями стрелы) до 5,9 м, радиусом копания до 8,4 м, высотой выгрузки до 4,4 м, усилием втягивания стрелы 56...90 кН, минимальной продолжительностью цикла основного ковша 21...23 с, максимальной технической производительностью до 70 м3/ч.
Дата добавления: 2015-11-24; просмотров: 6913;