Вогнутые и выпуклые поверхности цилиндрического типа
Распространение волн в случае рассеяния на вогнутой поверхности показано на рис. 4.7. Контроль производится прямым ПЭП (продольными волнами). Луч 1 падает под углом 90° к касательной к вогнутой поверхности, луч 2 под углом α, а луч 3 под углом большим, чем α. В результате двойного отражения будут возникать дополнительные сигналы (от лучей 2 и 3).
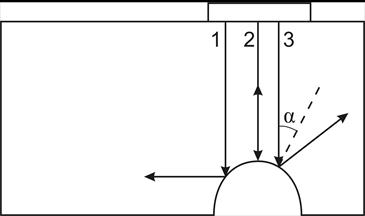
Рис. 4.7. Контроль цилиндрической вогнутой поверхности
При угле падения α= 45° луч 2 будет давать мощный отраженный сигнал. Для луча 3 угол, при котором будет наблюдаться мощный отраженный сигнал, равен 61°. На линии развертки сигнал 1 будет ближе всего, затем будут идти сигналы 2 и 3.
Рассмотрим случай контроля выпуклой поверхности цилиндрического стержня продольными волнами с помощью прямого ПЭП (рис. 4.8). Сигнал от преобразователя распространяется не только по прямой, но и под некоторым углом γ, отражается два раза от внутренней поверхности стержня, трансформируется при этом в поперечную волну t, затем повторно отражается с трансформацией в продольную волну и попадает обратно на ПЭП.
Ложный сигнал будет возникать на линии развертки на эквивалентном расстоянии 1,3 d, то есть время прихода импульса будет совпадать со временем регистрации сигнала, отразившегося от перпендикулярной плоскости на расстоянии 1,3 d. Если волна претерпевает трансформацию из продольной в поперечную и затем снова в продольную, то ложный сигнал будет наблюдаться на эквивалентном расстоянии 1,67 d. Оба ложных сигнала будут на развертке дальше донного сигнала. Причем амплитуда ложных сигналов бывает больше амплитуды донного, и их можно принять за донный сигнал.
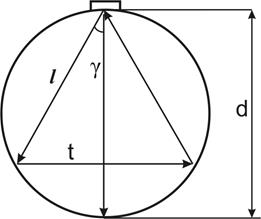
Рис. 4.8. Контроль выпуклой поверхности
Интерференция
В том случае, когда контроль ведут прямым преобразователем вблизи края изделия, то за счет расходимости луча зондирующий сигнал попадет на двугранный угол, отклонившись на расстояние d (рис. 4.9). Изделие имеет толщину l.
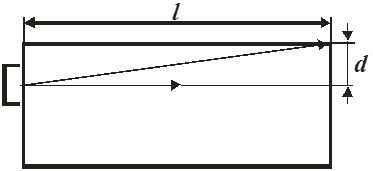
Рис. 4.9. Возникновение ложного сигнала при падении зондирующего луча на двугранный угол
Сигнал будет усиливаться в результате интерференции, если разность хода ∆ меньше длительности импульса τимп:
 . (3.6)
. (3.6)
Условие отсутствия интерференции
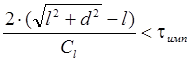 , (3.7)
, (3.7)
где Сl – скорость продольной волны.
В этом случае сигнал не будет усиливаться.
На рис. 3.14 изображен объект контроля с отверстием, отверстие находится на расстоянии l от ПЭП и на расстоянии h от края изделия.
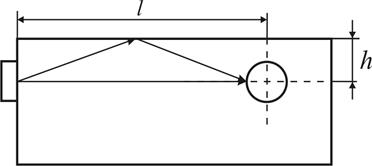
Рис. 4.9. Возникновение ложного сигнала при падении зондирующего луча на цилиндрическое отверстие
Рассмотрим два зондирующих луча. Один падает прямо на отверстие, а другой отражается от края изделия и также попадает на отверстие. Будут возникать интерференционные эффекты, дающие ложный сигнал. Условие отсутствия интерференции:
 . (4.2)
. (4.2)
Игнорирование интерференционных явлений приводит к неправильным результатам, и может оказаться, что при проведении УЗ-контроля амплитуда эхо-сигнала немонотонно убывает с расстоянием.
Дата добавления: 2015-12-10; просмотров: 1878;