Динамическая устойчивость
Электроэнергетическая система динамически устойчива, если при каком-либо сильном возмущении сохраняется синхронная работа всех ее элементов. При исследовании устойчивости необходимо определить, как поведет себя система в экстремальных условиях и какие меры следует принять, чтобы избежать нежелательных последствий.
Для выяснения принципиальных положений динамической устойчивости рассмотрим явления, проходящие при внезапном отключении одной из двух параллельных цепей ЛЭП (рис, 11, а).
Схемы замещения электропередачи в нормальном режиме при работе с двумя включенными цепями и в режиме с одной отключенной цепью показаны на рис. 11, б и в соответственно. Результирующее сопротивление в нормальном режиме определяется выражением
 (19)
(19)
а после отключения одной из цепей - выражением
 (20)
(20)
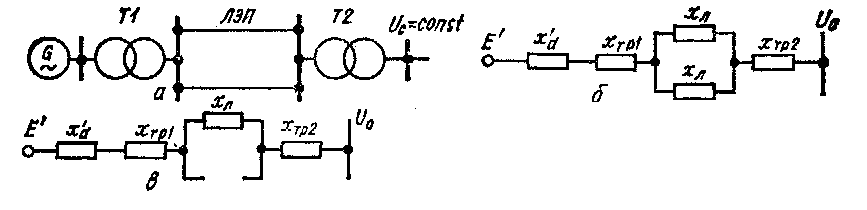
Рис.11. Схема электропередачи (а) и схемы ее замещения (б, в)
Так как  , то справедливо соотношение
, то справедливо соотношение

 (21)
(21)
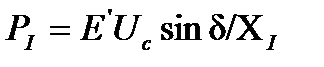
Из(21) следует, что при неизменных  ,
,  и изменении
и изменении  максимальное значение передаваемой мощности меняется.
максимальное значение передаваемой мощности меняется.
При внезапном отключении одной из цепей ЛЭП ротор не успевает из-за инерции мгновенно изменить угол δ. Поэтому режим будет характеризоваться точкой b на другой угловой характеристике2 на рис.12.После уменьшения его мощности возникает избыточный ускоряющий момент, под действием которого угловая скорость ротора, а следовательно, и угол δ увеличиваются. С увеличением угла мощность генератора возрастает по характеристике 2.
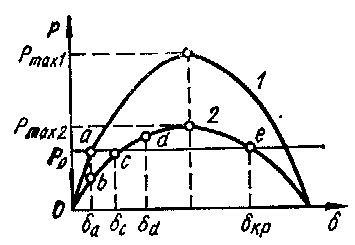
Рис. 12. Угловые характеристики мощности генератора при отключении одной цепи ЛЭП
В процессе ускорения ротор генератора по инерции проходит точку с, после которой его вращающий момент становится опережающим. Ротор начинает затормаживаться и, начиная с точки d, его угловая скорость уменьшается. При этом возникают затухающие колебания вокруг нового установившегося режима, соответствующего точке с. Если угловая скорость ротора возрастает до значения, соответствующего точке е или другим точкам на нисходящей части характеристики Р = f (δ), то генератор выпадает из синхронизма.
Следовательно, об устойчивости системы можно судить по изменению угла δ во времени. Изменение, показанное на рис. 13, а, соответствует устойчивой работе системы. При изменении δ по кривой, изображенной па рис. 13,б, система неустойчива.

Рис.13. Устойчивый (а) и неустойчивый (б) режимы работы системы
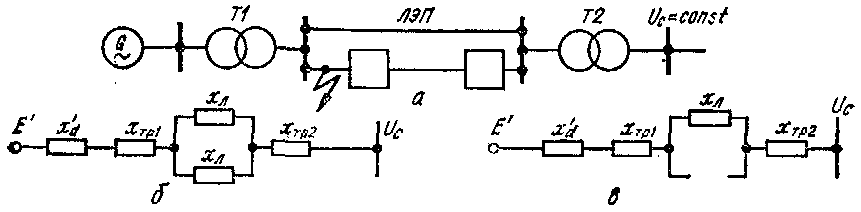
Pиc 14. Схема электропередачи (а) и схемы ее замещения для нормального (б) и послеаварийного (в) режимов
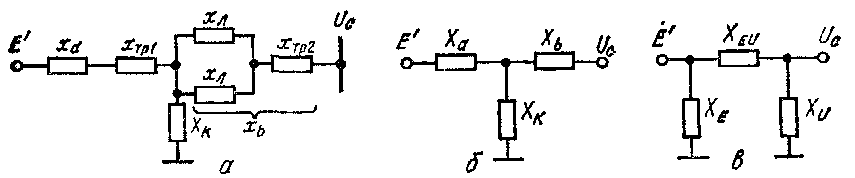
Рис.15. Схема замещения электропередачи для аварийного режима (а) и ее преобразования (б, в)
Рассмотрим переходный процесс при КЗ одной из цепей ЛЭП с последующим ее отключением (рис.14, а). Схемы замещения электропередачи для нормального и послеаварийного режимов показаны соответственно на рис. 14, б и в.
Угловая характеристика мощности генератора для нормального режима определяется выражением
 (22)
(22)
где

а для послеаварийного режима - выражением
 (23)
(23)
где

Схему замещения электропередачи для аварийного режима можно получить, если в точку КЗ включить шунтирующее сопротивление Хк (рис.15, а).
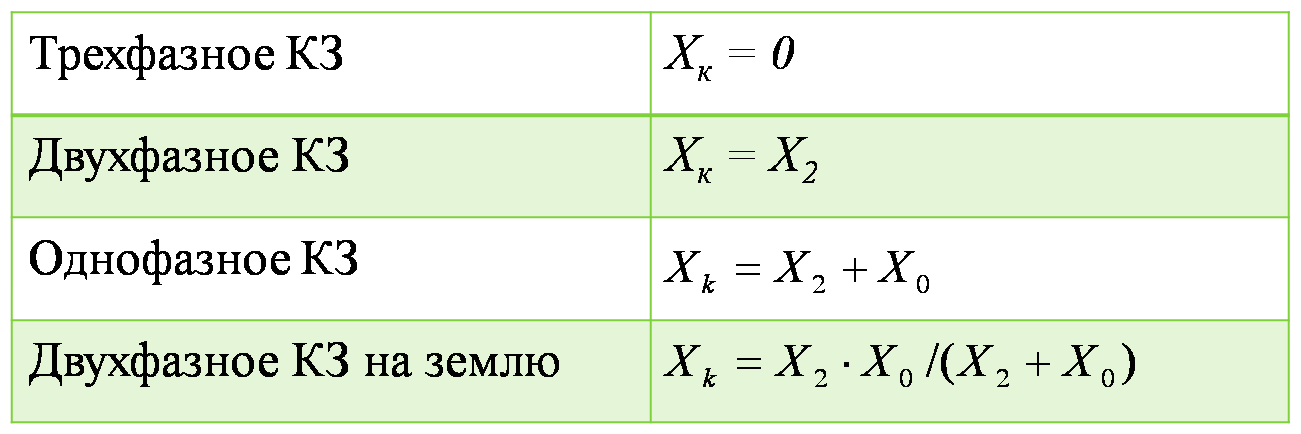
где Х0 и Х2 — суммарные сопротивления схем нулевой и обратной последовательностей относительно точки КЗ.
Схему замещения, показанную на рис.15, а,можно последовательно преобразовать из звезды (рис.15,б) в треугольник (рис. 15, в), в котором
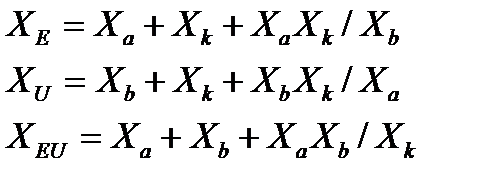 (24)
(24)
Сопротивления  и
и  , подключенные непосредственно к э. д. с.
, подключенные непосредственно к э. д. с.  и к напряжению
и к напряжению  , на активную мощность генератора в аварийном режиме существенно не влияют и могут не учитываться. При этом вся активная мощность генератора передается через сопротивление
, на активную мощность генератора в аварийном режиме существенно не влияют и могут не учитываться. При этом вся активная мощность генератора передается через сопротивление  , связывающее э. д. с. генератора с напряжением приемной системы , а угловая характеристика мощности генератора определяется выражением
, связывающее э. д. с. генератора с напряжением приемной системы , а угловая характеристика мощности генератора определяется выражением
 (25)
(25)
Амплитуда угловой характеристики мощности для аварийного режима зависит от сопротивления XEU. Это сопротивление является взаимным сопротивлением между э. д. с. E' и Uc. С уменьшением сопротивления шунта сопротивление XEUувеличивается, что приводит к снижению амплитуды угловой характеристики мощности. Наиболее тяжелый аварийный режим будет при трехфазном КЗ в начале ЛЭП, когда сопротивление XEU бесконечно велико, а амплитуда угловой характеристики мощности равна нулю. Самый легкий аварийный режим соответствует однофазному КЗ, при котором сопротивление шунта КЗ будет максимальным.
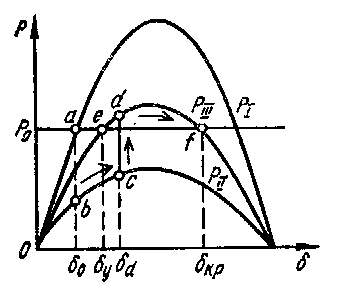
Рис. 16. Угловые характеристики мощности генератора для разных режимов
Угловые характеристики мощности генератора для нормального PI(δ), аварийного PII(δ) и послеаварийного PIII(δ) режимов показаны на рис. 16. Отдаваемая генератором мощность и угол между э. д. с. E'и напряжением Ucв нормальном режиме обозначены соответственно Р0 и δ0. В начальный момент КЗ из-за инерции ротора генератора угол δ мгновенно измениться не может. Это приводит к внезапному уменьшению мощности от точки а на характеристике РI(δ) до точки b на характеристике PII(δ). В результате на валу генератора возникает некоторый избыточный ускоряющий момент, обусловленный разностью мощностей первичного двигателя и генератора, под влиянием которого ротор генератора начинает перемещаться относительно вектора напряжения приемной системы (угол δ увеличивается). Этому перемещению соответствует увеличение мощности по характеристике PII(δ) в направлении к точке с.
Если при каком-либо значении угла δоткл=δd поврежденная цепь отключится, то в этот момент произойдет изменение мощности генератора из точки с характеристики PII(δ) в точку d характеристики PIII(δ). Мощность же первичного двигателя генератора во время переходного процесса, ввиду инерционности системы регулирования частоты вращения турбины, останется неизменной и равной Р0. После отключения КЗ электромагнитная мощность генератора будет больше механической мощности турбины и на его валу появится тормозящий момент. Несмотря на это, ротор генератора еще некоторое время продолжает движение в сторону увеличения угла δ, пока не израсходуется запасенная им на пути от δ0 до δоткл кинетическая энергия. В этот период генератор покрывает избыток отдаваемой им электромагнитной мощности за счет кинетической энергии, запасенной им во время ускорения.
Если вся кинетическая энергия будет израсходована до достижения ротором генератора угла δкр (точка f на характеристике PIII(δ)), то под действием избыточного тормозящего момента ротор начнет перемещаться в обратном направлении по характеристике PIII(δ) и после нескольких колебаний перейдет в новый установившийся режим с углом δУ, Если ротор пройдет угол δкр, то избыточный момент вновь станет ускоряющим. С увеличением угла δ ускоряющий момент ротора будет прогрессивно возрастать и генератор выйдет из синхронизма. Таким образом, в первом случае система динамически устойчива, а во втором - неустойчива.
Рассмотренные переходные режимы системы при разных возмущениях позволяют сформулировать отличительные признаки статической и динамической устойчивости:
при статической устойчивости в процессе появления возмущений мощность генератора изменяется по одной и той же угловой характеристике, а после их исчезновения параметры системы остаются такими же, как и до появления возмущений;
при динамической устойчивости система переходит на другую угловую характеристику, причем после исчезновения возмущений ее параметры отличаются от первоначальных, но остаются в допустимых пределах.
Дата добавления: 2015-12-08; просмотров: 2587;