Тема 3.1. ПРОЕКТИРОВАНИЕ ПРИВОДОВ ГЛАВНОГО ДВИЖЕНИЯ С БЕССТУПЕНЧАТЫМ
РЕГУЛИРОВАНИЕМ
(трудоемкость – 2 часа)
При проектировании приводов главного движения станков желательно обеспечивать постоянство передаваемой мощности по всему диапазону  регулирования частоты вращения шпинделя.
регулирования частоты вращения шпинделя.
Однако, в этом случае крутящий момент в приводе  , определяющий размеры всех элементов привода, будет наибольшим при
, определяющий размеры всех элементов привода, будет наибольшим при  , что приводит к увеличению габаритных размеров и стоимости привода. Кроме того, большое число статистических данных по обследованию фактической загрузки станков общего назначения показывает, что в нижней четверти диапазона регулирования полная мощность не используется. Поэтому для станков общего назначения целесообразно применять привод с комбинированным регулированием, когда до условной расчетной частоты
, что приводит к увеличению габаритных размеров и стоимости привода. Кроме того, большое число статистических данных по обследованию фактической загрузки станков общего назначения показывает, что в нижней четверти диапазона регулирования полная мощность не используется. Поэтому для станков общего назначения целесообразно применять привод с комбинированным регулированием, когда до условной расчетной частоты
 (1)
(1)
обеспечивается регулирование с постоянным моментом в диапазоне  (рис. 1), а выше регулирование с постоянной мощностью в диапазоне
(рис. 1), а выше регулирование с постоянной мощностью в диапазоне  . При этом значение максимального крутящего момента, по которому ведут силовой расчет привода, существенно снижается.
. При этом значение максимального крутящего момента, по которому ведут силовой расчет привода, существенно снижается.
Используемые в приводах главного движения для работы в бесступенчато-регулируемом по скорости режиме двигатели постоянного тока с тиристорными системами регулирования и асинхронные электродвигатели для частотного регулирования имеют двухзонное бесступенчатое регулирование: в диапазоне от номинальной (  ) до максимальной (
) до максимальной (  ) частоты вращения двигатель работает с постоянной мощностью, а при частоте вращения ниже
) частоты вращения двигатель работает с постоянной мощностью, а при частоте вращения ниже  — с постоянным моментом.
— с постоянным моментом.
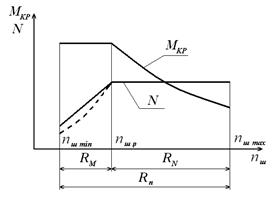
Рис. 1. Изменение мощности  и крутящего момента при различных частотах вращения шпинделя
и крутящего момента при различных частотах вращения шпинделя
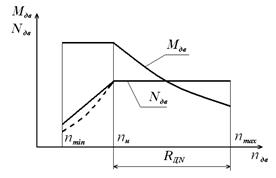
Рис. 2. Характеристики электродвигателя с двухзонным регулированием
Если построить графики мощности и момента двигателя, обеспечивающего двухзонное регулирование (рис. 2), то в координатах соответственно ,  и
и  , график мощности на участке постоянного момента будет изображаться отрезком прямой с угловым коэффициентом
, график мощности на участке постоянного момента будет изображаться отрезком прямой с угловым коэффициентом  , направленной к началу координат, а график момента на участке постоянной мощности будет являться отрезком гиперболы, имеющей - асимптотами оси координат, а параметром — произведение
, направленной к началу координат, а график момента на участке постоянной мощности будет являться отрезком гиперболы, имеющей - асимптотами оси координат, а параметром — произведение  .
.
Так как диапазон частот вращения двигателя велик, то для удобства графического представления мощности и момента двигателя для оси абсцисс (частота вращения двигателя) используется логарифмическая шкала. При этом наклонные участки графиков мощности будут представляться участками экспонент. То же относится и к характеристикам привода, приведенным к шпинделю (пунктирные линии на рис. 1 и 2).
Назовем отношение  диапазоном регулирования двигателя при постоянной мощности и обозначим через
диапазоном регулирования двигателя при постоянной мощности и обозначим через  , а отношение
, а отношение  — диапазоном регулирования на шпинделе при постоянной мощности и обозначим через
— диапазоном регулирования на шпинделе при постоянной мощности и обозначим через  (см. рис. 1).
(см. рис. 1).
Если имеем  , то можно использовать привод главного движения с постоянным передаточным отношением кинематической цепи. В этом случае механическая характеристика, получаемая на шпинделе (
, то можно использовать привод главного движения с постоянным передаточным отношением кинематической цепи. В этом случае механическая характеристика, получаемая на шпинделе (  , ), повторяет с точностью до потерь и в масштабе передаточного отношения характеристику двигателя.
, ), повторяет с точностью до потерь и в масштабе передаточного отношения характеристику двигателя.
Однако, если существующие двигатели обладают недостаточно широким диапазоном регулирования (  ), то в привод шпинделя приходится включать устройства, позволяющие ступенчато изменять передаточное отношение привода (коробки передач, ременные передачи со сменными шкивами и др.).
), то в привод шпинделя приходится включать устройства, позволяющие ступенчато изменять передаточное отношение привода (коробки передач, ременные передачи со сменными шкивами и др.).
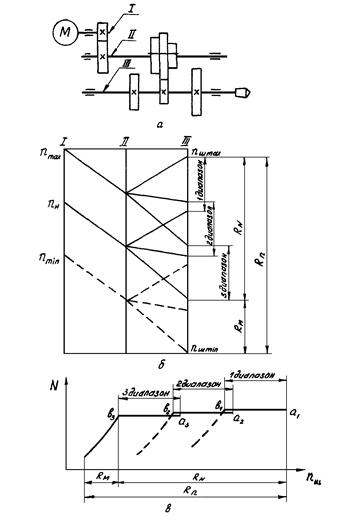
Рис. 3. Привод главного движения с коробкой скоростей и двигателем бесступенчатого регулирования скорости: а — кинематическая схема; б — график частот вращения; в — диаграмма мощности
В этом случае механическая характеристика привода (рис. 3, в) будет отличаться от характеристики двигателя наличием нескольких ветвей (по числу ступеней привода). Причем каждая ветвь будет состоять из двух участков — участка постоянной мощности и участка постоянного момента. При выборе двигателя необходимо принимать во внимание значения эффективной мощности на шпинделе при выполнении необходимых технологических операций во всем диапазоне изменения частот вращения. По полученной при этом максимальной, эффективной мощности  определяется потребная мощность двигателя
определяется потребная мощность двигателя
 ,
,
по которой выбирается типоразмер двигателя.
При этом на выбор двигателя влияют два противоположно направленных фактора: потребность снизить вес и габариты двигателя склоняют выбор в сторону двигателя с возможно меньшей мощностью (обеспечивающей реализацию заданных технологических режимов), но приводит к увеличению числа ступеней привода, потребность же упростить конструкцию и кинематику, уменьшить вес и габариты привода может быть удовлетворена только за счет увеличения мощности, а, следовательно, веса и габаритов двигателя, что дает возможность увеличить значение  (рис. 4). Выбор двигателя должен производиться при разумном сочетании этих требований.
(рис. 4). Выбор двигателя должен производиться при разумном сочетании этих требований.
Как правило, возможное увеличение мощности выбираемого двигателя с целью упрощения конструкции привода не превышает 30…40% мощности, требуемой для выполнения технологических режимов.
В случае использования в приводе главного движения коробки скоростей имеем
 , (2)
, (2)
где  — диапазон регулирования коробки скоростей, т.е. коробку скоростей можно рассматривать как переборную группу, расширяющую диапазон регулирования привода, и тогда
— диапазон регулирования коробки скоростей, т.е. коробку скоростей можно рассматривать как переборную группу, расширяющую диапазон регулирования привода, и тогда
 .
.

Рис. 4. Расширение диапазона при использовании двигателя увеличенной мощности
Учитывая, что при бесступенчатом регулировании  , необходимо, чтобы
, необходимо, чтобы  . Учитывая, что при ступенчатом регулировании
. Учитывая, что при ступенчатом регулировании  , получаем
, получаем
и, окончательно, учитывая (2),
 . (3)
. (3)
Выражение (14) позволяет определить число ступеней коробки скоростей:
 . (4)
. (4)
Если значение  является целым, то концы участков постоянной мощности последовательных ступеней на графике мощности привода сопрягаются между собой. В этом случае на рис. 3, в совпадают точки
является целым, то концы участков постоянной мощности последовательных ступеней на графике мощности привода сопрягаются между собой. В этом случае на рис. 3, в совпадают точки  и
и  ;
;  и
и  . Если после вычисления по формуле (4) его значение округляется в большую сторону, то имеет место перекрытие диапазонов (см. рис. 3), т.е.
. Если после вычисления по формуле (4) его значение округляется в большую сторону, то имеет место перекрытие диапазонов (см. рис. 3), т.е.  , где
, где  и
и  — частоты вращения шпинделя, соответствующие точкам
— частоты вращения шпинделя, соответствующие точкам  и
и  соответственно;
соответственно;  — точки, соответствующие максимальной используемой частоте вращения двигателя ;
— точки, соответствующие максимальной используемой частоте вращения двигателя ;  — точки, соответствующие номинальной частоте вращения двигателя .
— точки, соответствующие номинальной частоте вращения двигателя .
Если после вычисления по формуле (4) его значение с целью сокращения числа ступеней привода округляется в меньшую сторону, то получаем незначительные разрывы (рис. 4) вследствие переключения коробки на следующую ступень при частоте вращения двигателя меньше номинальной. При этом двигатель работает в зоне постоянного момента (снижающейся мощности).
Обозначив 
 , с учетом формулы (3) получим
, с учетом формулы (3) получим
или
 ,
,
откуда
 . (5)
. (5)
Задав допустимое значение  и округлив рассчитанное по формуле (5) значение до ближайшего большего целого числа, получим минимальное необходимое число ступеней.
и округлив рассчитанное по формуле (5) значение до ближайшего большего целого числа, получим минимальное необходимое число ступеней.
Допустимое значение  получаем из следующих соображений. Зная, что в диапазоне
получаем из следующих соображений. Зная, что в диапазоне  мощность изменяется пропорционально частоте вращения двигателя, найдем, что относительное падение мощности при уменьшении частоты вращения двигателя от до
мощность изменяется пропорционально частоте вращения двигателя, найдем, что относительное падение мощности при уменьшении частоты вращения двигателя от до  составит
составит
 .
.
Отсюда
 .
.
Аналогичная зависимость связывает перепад  с . Если ограничить падение мощности (момента) 20% (
с . Если ограничить падение мощности (момента) 20% (  = 0,2), то допустимое значение составит 1,25.
= 0,2), то допустимое значение составит 1,25.
Необходимо помнить, что упрощение механической части привода за счет возникновения разрывов в характеристиках возможно, если технологические операции, осуществляемые в средней части диапазона, не требуют полной мощности, либо их возможно осуществить на заниженных режимах обработки без существенного снижения производительности.
Тема 4.1. ШПИНДЕЛЬНЫЕ УЗЛЫ (ШУ)
(трудоемкость – 2 часа)
Дата добавления: 2015-11-06; просмотров: 2243;