Промышленные роботы микроэлектроники
Робот — автономно функционирующая машина-автомат, предназначенная для воспроизведения двигательных функций человека во время про-
изводственных операций без его участия и наделенная для этого способностями человека (силой, памятью и т. д.), а также способностью к обучению для работы в комплексе с другим оборудованием и приспособлением к производственной среде.
Для выполнения своих функций ПР имеет:
манипулятор с набором исполнительных механизмов (захват, сварочная головка, зонд и т. д.), позволяющий в автоматическом цикле выполнять требуемые функции;
систему управления, обеспечивающую выдачу команд на исполнительные механизмы манипуляторов в зависимости от положения рабочих органов и от состояния внешней среды (ориентация детали, ее размер, масса, температура и т. п.).
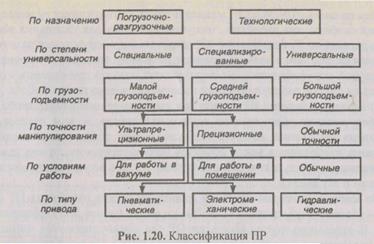
Классификация ПР представлена на рис. 1.20. По степени универсальности ПР делятся на специальные, специализированные и универсальные.
Специальные ПР предназначены для выполнения какой-либо одной операции, обслуживания одного типа оборудования (автооператор). Манипулятор таких роботов прост по конструкции, обладает несколькими степенями подвижности, система управления (СУ) имеет узкий диапазон переналадок и работает по жесткой программе. Специальные ПР используются для загрузки, перемещения и манипуляций полупроводниковыми пластинами в элионных установках: установках полного легирования, ионноплазменного и плазмохимического травления, нанесения тонких пленок и др. Ввиду стабильности формы объекта манипулирования (меняется лишь диаметр пластины в пределах 60—450 мкс) и траекторий движения манипулятора не требуется корректировки системой управления.
Универсальный ПР обладает манипулятором, который имеет не менее семи степеней свободы: три линейных, три угловых и одно для удержания объекта манипулирования. Универсальные ПР обслуживают оборудование различного технологического назначения, выполняют различные операции с широкой номенклатурой полуфабрикатов, их легко можно перепрограммировать и переключить на другую работу в пределах технических возможностей робота.
Специализированные ПР служат для выполнения операций одного вида или обслуживания оборудования одного назначения. К ним предъявляют ряд особых требований, которые и обусловливают специализацию роботов (например, требования к массе объектов манипулирования, точности манипулирования, к среде, в которой робот работает, и к возмущениям, которые он вносит в эту среду).
По массе и размерам объектов манипулирования различают ПР большой — (более 60 кг), средней (5—60 кг) и малой (менее 5 кг) грузоподъемности. В отдельную группу выделяют ПР для манипулирования миниатюрными изделиями с массой менее килограмма (40%). По требованию к точности манипулирования различают роботы нормальной точности с погрешностью позиционирования в зависимости от грузоподъемности 0,1—5 мм, прецизионные роботы с погрешностью 5 мкм и ультрапрецизионные роботы с погрешностью до 0,03 мкм.
Роботы нормальной точности применяют для манипулирования транспортными или технологическими кассетами, перекладки полупроводниковых пластин из кассеты в кассету, на химических операциях. Прецизионные роботы манипулируют пластинами или кристаллами на операциях посадки кристалла, разводки выводов, герметизации корпусов, а также интегральными схемами на операциях контроля и разбраковки. Ультрапрецизионные роботы с погрешностью 0,03—1 мкм манипулируют пластинами на операции литографии.
По требованиям к окружающей среде различают роботы, которые могут работать в масляном и безмасляном вакууме, существенно не изменяя его параметров, чистые роботы, которые не ухудшают атмосферу чистых комнат соответствующих классов, и обычные роботы, к которым не предъявляют никаких специфических требований по герметичности, газо- и пылевыделениям.
Для работы в чистых комнатах разрабатывается поколение роботов, цель применения которых — устранить контакт человека с обрабатываемыми изделиями. Именно человек является основным источником загрязнений поверхности полупроводниковых структур. Для таких роботов необходим специальный привод с минимальным числом пар внешнего трения, минимальным выделением продуктов износа, паров масел, отсутствием зон, способствующих накоплению пыли, препятствующих общему ламинарному потоку воздуха в помещении. Так, робот ALPHA одет в одежду из специальной ткани, что сделало его пригодным для работы в помещениях первой категории. Робот PUMA фирмы Vnimation оснащен встроенным в руку вен-
тилятором, создающим в зоне захвата ламинарный всасывающий поток воздуха, способствующий дополнительной локальной очистке воздушной среды в зоне манипулирования.
Роботы первого поколения работают по жесткой программе. Эти роботы не способны воспринимать внешнюю информацию об ориентации детали, ее размерах, массе, усилиях зажима. Они не способны адаптироваться к изменяющейся внешней среде. Такие роботы используются на простых операциях (транспортно-перегрузочные, окраска, гальванопокрытие, сушка). Управление этими роботами осуществляется от механических или пневматических командоаппаратов, специализированных и универсальных контроллеров, построенных на микропроцессорной основе. Программирование цикла технологических операций осуществляется перенастройкой командоаппаратов, перекоммутацией штекерной панели, составлением и записью в ОЗУ алгоритма управления или обучением.
При обучении робот управляется вручную, система управления следит и запоминает порядок движений рабочих органов и таким образом формирует в ОЗУ алгоритм управления.
Роботы второго поколения (адаптивные) работают по гибкой программе, их реакция определяется не только состоянием робота, но и состоянием внешней среды, для чего они снабжены датчиками внешней информации: искусственными зрением, слухом, осязанием и другими устройствами, позволяющими выделять необходимую информацию об ориентации детали, ее размерах и других свойствах. Система управления такими роботами строится на базе микроЭВМ, для перепрограммирования в ней используются специальные диалоговые языки, близкие к естественному и не требующие от пользователя никакой подготовки по программированию. Иногда программирование осуществляется обучением. Некоторые операции при производстве интегральных схем (фотолитография, посадка кристаллов, сварка выводов) невозможно провести, если при управлении технологическими процессами не учитывать состояние внешней по отношению к оборудованию информации о параметрах полуфабрикатов и внешней среды: размерных погрешностях, температуре влажности и т. п. Управление такими операциями должно быть адаптивным и выполняться адаптивными ПР.
Роботы третьего поколения или интеллектуальные только разрабатываются и не вышли из стен лабораторий. Особенностью этих ПР является высокая приспособляемость к внешним условиям. Они могут выбирать нужные детали из навала, ориентировать их для выполнения последующих операций, оптимизировать результаты своей работы, самообучаться. Столь высокая адаптация приведет к повышенной автономности робота. При своей работе он будет требовать минимальное число команд от системы управления высшего уровня.
Система искусственного интеллекта обеспечит минимальную трудоемкость программирования робота, ему будет сообщаться лишь цель его работы, что нужно сделать и какие обеспечить параметры. А как это сделать, т. е. како-
вы должны быть последовательность и параметры каждой из операций, робот решит сам.
При этом он постоянно будет самообучаться, т. е. совершенствовать алгоритм своего управления так, чтобы активизировать результат работы. Интеллектуальные ПР — универсальны, их работа в составе ГАП (РТК) автоматически обеспечит гибкость технологических систем, так как робот сам сможет подбирать оптимальные технологические процессы. В этом роботу будет помогать централизованная система управления комплексом.
Основная тенденция развития роботостроения — стремление к универсальности, автономности и адаптации к внешней среде.
Дата добавления: 2015-10-29; просмотров: 1437;