Кинематические характеристики механизмов
Звенья функционирующего механизма выполняют определенные движения. Для изучения этих движений необходимо знать их характеристики, называемые кинематическими. К кинематическим характеристикам относятся траектории точек, перемещения точек и звеньев, их скорости и ускорения и др. общем случае кинематические характеристики зависят от закона движения ведущего звена и строения механизма. Такие характеристики, как функция положения, передаточная функция определяются только строением механизма.
Всякое подвижное звено механизма - это заданной формы твердое тело, точки которого и звено в целом совершают определенные движения. Следовательно, для нахождения кинематических характеристик движения звеньев механизма необходимо знать общие методы кинематического исследования движения материальных точек и твердых тел.
Способы задания движения точки
Существуют три способа задания движения точки: векторный, координатный и естественный.
Векторный способ задания движения точки. Векторный способ задания движения точки применяют при теоретическом рассмотрении. Положение точки в пространстве при векторном способе определяется радиус- вектором r (рис. 2.1).
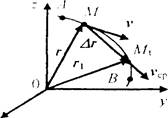
Рис 2.1
Непрерывная кривая АМВ. описываемая с течением времени движущейся точкой /V/. называется траекторией. В зависимости от траектории движение может быть прямолинейным или криволинейным.
Геометрическое место концов любого переменного вектора при неизменном положении его начала называется годографом. Следовательно, траектория точки совпадает с годографом ее радиус-вектора.
При движении точки М вектор rизменяется как по модулю, так и по направлению, другими словами, он является переменным вектором, зависящим от аргумента t
г = r (t).(2.1)
Это и есть уравнение движения точки в векторной форме.
Если в момент времени t точка находится в положении М, то в момент времени t1= t +D tона будет находиться в положении М1Соответственно, положение точки определяется радиус-векторами rи r 1,. Вектор MM1, является вектором перемещения точки М за данный промежуток времени D t
MM1 = D r = r1 – r (2.2)
Отношение вектора перемещения точки к соответствующему промежутку времени определяет среднюю скорость точки уср:
 (2.3)
(2.3)
Чтобы получить характеристику движения, не зависящую от выбора промежутка времени, вводится понятие скорости точки в данный момент времени:
 (2.4)
(2.4)
Следовательно,
 (2.5)
(2.5)
Вектор скорости точки (см. рис. 2.1) будет направлен по касательной к траектории движения точки.
Если выбрать в пространстве точку и туда перенести все векторы скоростей в моменты времени, близко отстоящие один от другого, то получим кривую, являющуюся годографом вектора скорости (рис. 2.2). Годограф скорости представляет собой геометрическое место концов вектора скорости движущейся точки.
Если за время D tскорость изменилась на величину D v, то отношение изменения скорости к промежутку времени, за который произошло это изменение, будет средним ускорением. Для нахождения значения ускорения в данный момент времени необходимо найти предел отношения приращения скорости к промежутку времени, в течение которого оно произошло, при стремлении последнего к нулю:
 (2.6)
(2.6)
Таким образом,
 (2.7)
(2.7)
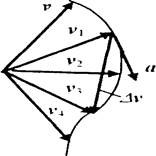
Рис. 2.2
Координатный способ задания движения точки.Координатный метод изучения движения точки используется в основном при решении технических задач.
При движении точки ее координаты изменяются с течением времени. Следовательно:
 (2.8)
(2.8)
Это и есть уравнения движения точки в прямоугольных координатах.
Одновременно эти уравнения являются уравнениями траектории точки в параметрической форме. Исключив из них параметр /, получим уравнение траектории, характеризующее пространственную кривую в координатной форме.
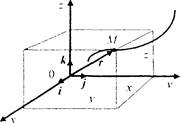
Рис. 2.3
Радиус-вектор г (рис. 2.3), определяющий положение точки М, можно представить в форме
 (2.9)
(2.9)
где i, j, k — единичные векторы (орты).
Система осей Охуz предполагается неподвижной, вследствие чего векторы (орты) i, j, k являются постоянными. Дифференцируя выражение (2.10) для радиус-вектора г, получим
 (2.10)
(2.10)
Выражение (2.10) представим в виде
 (2.11)
(2.11)
где vx, vy, vz- — проекции вектора скорости на соответствующие оси координат, определяемые из выражений
 (2.12)
(2.12)
Модуль вектора скорости определяется выражением
 (2.13)
(2.13)
а направляющие косинусы для вектора скорости записываются виде
 (2.14)
(2.14)
Аналогично записываются выражения для вектора ускорения при координатном способе задания движения точки, модуля вектора и направляющих косинусов
Дата добавления: 2015-10-26; просмотров: 2632;