Регулирование частоты вращения ротора низкого давления (N1) и степени повышения давления в двигателе
Для регулирования тяги система управления использует главный управляемый параметр, напрямую зависящий от тяги двигателя. Этим параметром может быть частота вращения ротора низкого давления (N1) или степень повышения давления в двигателе (EPR – Engine Pressure Ratio). Изготовитель двигателя решает, какой из этих двух параметров использовать. Фирмы GEAE и CFM используют частоту (N1); фирмы Rolls-Royse и Pratt&Whitney – степень повышения давления в двигателе (EPR).
Если частота (N1) является главным управляемым параметром, система управления поддерживает расход воздуха в двигателе постоянным при помощи адаптации частоты (N1) к изменяющейся плотности наружного воздуха. Для этой цели система должна получать информацию о плотности воздуха из воздухозаборника.
Такая система управления может представлять собой систему регулирования частоты вращения ротора газогенератора (N2), которая дополнена корректировкой по плотности воздуха, замеряемой на входе вентилятора. Для корректировки по плотности потока воздуха, кроме входных сигналов положения РУД и частоты (N2), необходимы входные сигналы, задающие температуру (T20) и давление (PS12) на выходе из воздухозаборника а также сигналы температуры воздуха на входе компрессора (CIT – Compressor inlet temperature) и давления на выходе компрессора (CDP - Compressor pressure или Ps3) Подобная система может регулировать только частоту вращения ротора высокого давления при изменении плотности воздуха.
На рис. 18 показан пример входных сигналов гидромеханической системы управления CFM56-3. Этот блок управляет частотой (N2), поскольку он получает информацию о частоте вращения только вала ротора высокого давления (N2).
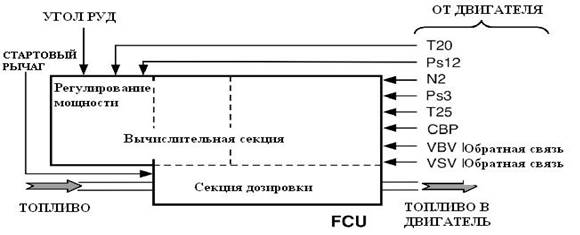
Рис. 18. Входные сигналы для FCU двухкаскадного двигателя со способностью регулирования тяги
Согласование частот двух роторов изменяется с износом двигателя, и реальная частота (N1) всегда будет на несколько процентов ниже или выше корректируемого значения частоты (N1), в то время как блок управления регулирует только частоту (N2). Для точного управления расходом воздуха (тягой) необходима точная регулировка частоты вращения ротора вентилятора (N1) по корректируемому значению в зависимости от выбранного режима работы двигателя. Системы управления с гидромеханическим FCU используют электронный блок управления как регулятор частоты (N1) в дополнение к FCU, управляющим частотой (N2) для решения этой проблемы. На двигателях CF6-80C2 (версия с РМС) или CFM56-3 в качестве электронного блока управления используется Блок Управления Мощностью (PMC – Power Management Control).
Если в системе управления основным параметром является степень повышения давления (EPR - Engine Pressure Ratio. Это соотношение между давлением газовой струи в выходном устройстве двигателя к давлению воздуха на входе в воздухозаборник [4]), то сохранение постоянной тяги осуществляется поддержанием постоянного значения этого параметра. Таким же образом сохраняется и величина расхода воздуха через двигатель. FCU, управляющий частотой (N2), корректируется электронным контролирующим блоком управления степенью повышения давления. Такой способ управления используется на версиях двигателей JT9D-7R4 и RB211-524.
На рис. 19 показано установленное отношение между углом установки РУД (TLA) и требуемым значением тяги для такой системы.
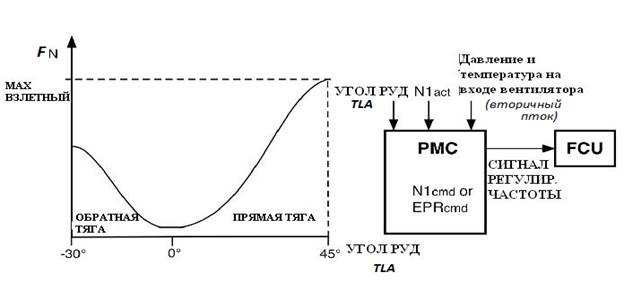
Рис. 19. Зависимость между положением РУД и требуемой тягой является фиксированной на всех фазах полета. РМС рассчитывает соответствующие командные N1 и EPR (N1cmd и EPRcmd)
Пилот всегда выбирает один и тот же угол установки РУД для требуемой тяги. Поскольку система управления не может напрямую управлять тягой, блок управления (РМС) рассчитывает значения основных параметров (N1 и EPR) в соответствии с требуемым значением тяги. Это выполняется применительно к реальным внешним условиям. Результат расчетов называется командным сигналом (N1) или командным сигналом (EPR). Для расчета функции используется термин «управление мощностью».
На двигателях фирм GEAE и CFM блоки управления называются в соответствии с этим термином. Здесь они называются «системой управления мощностью» (PMC). PMC сравнивает реальное значение (N1) с командным значением. При наличии разницы PMC корректирует управляемую FCU частоту вращения ротора (N2). Для этого PMC регулирует частоту (N2) до тех пор, пока реальная частота (N1) не сравняется с командной частотой (N1cmd). В системе, работающей с EPR, контролирующий блок работает идентично, но он сравнивает реальное значение (EPR) с его командным значением (EPRcmd).
Дата добавления: 2015-10-26; просмотров: 2112;