САУ (САР) двигателем и подачей топлива ТРДД CFM56-3 (версия с РМС)
Система управления двигателем CFM56-3 состоит из двух блоков: МЕС (гидромеханическая часть) и РМС (электронная часть) с соответствующими датчиками. Гидромеханический блок управления двигателем CFM56-3 называется Основной блок Управления Двигателем (MEC – Main Engine Control).. Такое название этого блока используется фирмами CFM и GE, поскольку он выполняет функции блока управления топливом и блока управления вспомогательными системами. На двигателе CFM56-3 вспомогательными системами являются:
- система VBV (Variable Bleed Valve – варьируемые клапана перепуска воздуха за КНД во внешний контур);
- система VSV (Variable Stator Vane – поворотные лопатки НА статора КВД);
- система активного управления радиальными зазорами в ТВД.
Электронный блок называется блок Управления Мощностью (PMC – Power Management Control).
Единственным управляемым параметром для гидромеханической системы управления двигателем CFM56-3 является частота вращения ротора высокого давления (N2) (рис. 26). Этот же параметр передается в блок МЕС для организации обратной связи в процессе управления. Компенсация изменения плотности воздуха на входе в двигатель возможна, т.к. система управления получает сигналы Ps12 (статическое давление перед вентилятором) и Т20 (полная температура воздуха на входе в компрессор) из воздухозаборника и корректирует командные сигналы в зависимости от изменения окружающих условий.

Рис. 26. Схема системы управления двигателя CFM56-3:
PLA – угол положения РУД; CMD – корректировочный сигнал регулировки; CDP – статическое давление на выходе из КВД; Т12 –полная температура перед вентилятором; TCCV TIMER – клапан регулировки зазором ТВД и таймер
Если блок МЕС работает без блока РМС, он работает как опосредованный регулятор тяги и использует для этого частоту вращения ротора высокого давления (N2). Работа двигателя в условиях, когда блок РМС не выполняет своих функций, возможна. Но пилот должен помнить о возможном отклонении от правильной частоты (N1) при соответствующем положении РУД (TLA – Thrust (throttle) lever angle).
Давление отбора воздуха за КВД (CBP – Customer Bleed Pressure) необходимо для отслеживания работы системы отбора воздуха к потребителям самолета. Исходя из режима работы двигателя блок МЕС программирует закон изменения подачи топлива на разгоне, сохраняя время разгона примерно постоянным независимо от режима работы системы отбора воздуха.
На рис. 27 показано расположение блока МЕС на двигателе СFM56-3. На задней поверхности блока видны топливные магистрали, подведённые к приводам подсистем. Все эти приводы работают на давлении топлива от блока МЕС.

Рис. 27. Размещение блока МЕС на двигателе CFM56-3 (вид слева)
Блок PMC (блок управления мощностью) является электронным компонентом, которому ему необходимо электропитание. На двигателе CFM56-3 блок PMC питается от малогабаритного генератора переменного тока, установленного на коробке приводов. Генератор начинает подачу электроэнергии в блок РМС на частоте (N2) ниже частоты МГ. Благодаря этому система автоматического управления двигателем является независимой от энергосистемы самолета. Основной функцией PMC является корректировка N1 посредством исполнительного агрегата MEC.
На рис. 28 представлены входные сигналы, поступающие в блок РМС. После расчета блоком РМС командной частоты (N1cmd) происходит её сопоставление с фактическим значением (N1act) Если существует рассогласование между значениями (N1cmd) и (N1act), блок РМС посылает сигнал регулировки в блок МЕС. Этот сигнал поступает на мотор корректировки, расположенный внутри блока МЕС. С помощью мотора корректировки блок РМС изменяет установку частоты вращения (N2) на регуляторе частоты вращения в блоке МЕС на несколько процентов вверх или вниз. Блок МЕС разгоняет или тормозит ротор высокого давления с целью достижения командной частоты (N1cmd).

Рис. 28. Место блока РМС в системе управления двигателем CFM56-3: N1act – фактическая частота вращения ротора низкого давления
Т.к. блок МЕС управляет двигателем при определенном положении РУД и частоте (N2), при которых частота (N1) близка к частоте (N1cmd), в блоке РМС происходит только небольшая регулировка частоты (N1).
Благодаря способности управлять частотой (N1) очень точно, блок РМС предотвращает превышение максимальной тяги на взлетном режиме из-за передвижения РУД слишком далеко. Это также предохраняет двигатель от превышения температуры газа в жаркую погоду.
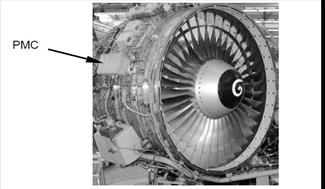
Рис. 29. Блок РМС двигателя CFM56-3 (вид справа)
Дата добавления: 2015-10-26; просмотров: 2877;