Классификация датчиков. В зависимости от принципа действия датчики делятся на:
В зависимости от принципа действия датчики делятся на:
- параметрические (модуляторы);
- генераторные
По виду входного сигнала различают датчики:
- уровня;
- давления;
- температуры;
- скорости и т.п.
По виду входного сигнала датчики могут быть:
- аналоговыми;
- дискретными;
- линейными;
- нелинейными
В зависимости от вида контролируемой неэлектрической величины:
- механические;
- тепловые;
- оптические и т.д.
Параметрические (модуляторы) – это такие датчики, у которых изменение входной величины датчика вызывает изменение какого – либо параметра самого датчика (К ним относятся: контактные, реостатные, тензодатчики, потенциометрические, терморезисторы, ёмкостные,индуктивные, электронные, фоторезисторные и др.)
Генераторными называются такие датчики, у которых изменение входной величины датчика вызывает генерацию (появление, создание) электрического сигнала на его выходе. Эти датчики не требуют вспомогательного источника энергии. (К ним относят: термоэлектрические (термопары), индукционные, пъезоэлектрические, вентильные фотоэлементы).
Аналоговые датчики это такие датчики, у которых либо входной сигнал, либо сигнал на выходе, либо оба сигнала являются аналоговым.
У дискретных датчиков оба сигнала, или хотя бы один сигнал на входе или на выходе является дискретным (импульсным, цифровым и т.п.)
Линейные датчики – выходная величина изменяется пропорционально изменению входной величины.
Нелинейные датчики – выходная величина изменяется нелинейно относительно изменению входной величины.
Часто применяются электрические датчики с промежуточным преобразованием, т.е. механический датчик объединяют с электрическим. Преобразование контролируемой величины в таких датчиках происходит по схеме: измеряемая величина — механическое перемещение — электрическая величина.
Элемент, преобразующий измеряемую величину в перемещение, называется первичным преобразователем или первичным измерителем (ПИ). Например, давление преобразуется в перемещение стрелки манометра ПИ, которое затем преобразуется в изменение активного сопротивления (проволочный, резистивный (или реостатный) датчики и др.).
2. Усилитель— элемент автоматики, осуществляющий количественное преобразование (чаще всего усиление) поступающей на его вход физической величины (тока, мощности, напряжения, давления и т.п.). Усилитель обязательно должен иметь дополнительный источник энергии. Основной характеристикой усилителя является зависимость y = f(x); при этом обычно стремятся к получению линейной или близкой к ней характеристики на рабочем участке. Величины на входе и выходе усилителя имеют одинаковую физическую природу. На рис. 1.3 изображены различные виды характеристики усилителей.
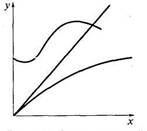
Рисунок 1.3 Виды характеристики усилителей
По принципу действия усилители разделяются на: электронные, полупроводниковые, магнитные, электромашинные, пневматические, гидравлические.
3. Стабилизатор— элемент автоматики, обеспечивающий постоянство выходной величины у при колебаниях входной величины х в определенных пределах. Эффект стабилизации достигается за счет изменения параметров элементов, входящих в схему стабилизатора; при этом вид энергии на его входе и выходе должен быть один и тот же.
Характеристики стабилизаторов показаны на рис. 1.4.
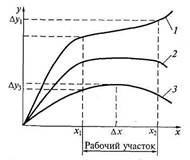 Рисунок 1.4 Виды основной характеристики стабилизаторов
Рисунок 1.4 Виды основной характеристики стабилизаторов
| Характеристика 1 обеспечивает меньшую стабилизацию выходной величины у, чем характеристика 2. В случае, если кривая не имеет в заданном диапазоне горизонтального участка, а имеет максимум (кривая 3) или минимум, то точность стабилизации будет больше, чем в случае, характеризуемом кривой 1. |
В зависимости от вида стабилизируемой величины различают стабилизаторы напряжения и тока, обеспечивающие постоянство напряжения или тока в нагрузке при колебаниях входного напряжения и сопротивления нагрузки.
4. Реле — элемент автоматики, в котором при достижении входной величины х определенного значения выходная величина у изменяется скачком. Зависимость у = f(x) реле неоднозначна и имеет форму петли (рис. 1.5). При изменении входной величины от 0 до х2 выходная величина у изменяется незначительно (или остается постоянной и равной у1). При достижении входной величины х значения х2, т.е. х = х2, выходная величина изменяется скачком от значения у1 до у2. Впоследствии при увеличении х выходная величина изменяется незначительно или остается постоянной (имеет установившееся значение). Когда входная величина уменьшается до значения х1 выходная величина сначала остается также неизменной и почти равной у2. В тот момент, когда х = х1 выходная величина скачком уменьшается до значения ух и сохраняется приблизительно неизменной при уменьшении х до нуля.
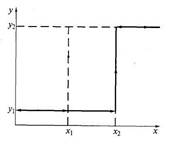
Рисунок 1.5 Основная характеристика реле
Скачкообразное изменение выходной величины у в момент, когда х = х2, называется величиной срабатывания (например, ток срабатывания, напряжение срабатывания для электрических реле). Скачкообразное изменение выходной величины у в момент, когда х = х1 называется величиной отпускания (ток отпускания, напряжение отпускания). Отношение величины хх к величине срабатывания х2 называется коэффициентом возврата, т.е. Kв = х1/х2. Так как обычно х1 < х2, то Kв < 1.
Существуют различные типы реле, но основными являются электромеханические реле (электромагнитные, магнитоэлектрические, электродинамические и др.), в которых изменение входной электрической величины вызывает замыкание или размыкание контактов. Бывают бесконтактные магнитные реле и бесконтактные реле электронного типа.
5. Распределитель (шаговый искатель)— элемент автоматики, осуществляющий поочередное подключение одной величины к ряду цепей. При этом подключаемые цепи обычно электрические.
Распределители используются при необходимости управления несколькими объектами от одного и того же управляющего органа и по способу передачи импульсов в управляемые цепи делятся на электромеханические (контактные), электронные и ионные (бесконтактные).
6. Исполнительные устройства — электромагниты с втяжным и поворотным якорями, электромагнитные муфты, а также электродвигатели, относящиеся к электромеханическим исполнительным элементам автоматических устройств.
Электромагниты преобразуют электрический сигнал в механическое движение; их применяют для перемещения рабочих органов, например клапанов, вентилей, золотников и т. п.
Электромагнитные муфты используются в электроприводах и устройствах управления для быстрого включения и выключения приводимого механизма, а также для его реверса, т.е. изменения направления движения управляемого устройства.
В некоторых случаях электромагнитные муфты применяют для регулирования скорости и ограничения передаваемого момента.
Электродвигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую и преодолевающее при этом значительное механическое сопротивление со стороны перемещаемых устройств. Одним из главных требований, предъявляемых к электродвигателям, является их способность развивать требуемую механическую мощность. Кроме того, электродвигатель должен обеспечивать реверс, а также движение объекта с заданными скоростями и ускорениями.
Наиболее широко в качестве электромеханических исполнительных элементов применяют электродвигатели постоянного и переменного тока.
Дата добавления: 2015-10-26; просмотров: 7519;