Основные характеристики элементов систем автоматики
Системы автоматики состоят из ряда связанных между собой элементов. Каждый элемент имеет свои физические свойства, которые определяются рядом характеристик и параметров.
В зависимости от характеристик элементов вся система также будет обладать своей характеристикой. Поэтому, зная характеристики отдельных элементов системы, мы сможем представить, как будет работать данная система.
Режим работы элемента (системы) при постоянных во времени входной x и выходной y величинах называют статическим (установившимся) режимом, т.е. в этом режиме:
x(t) = const; y(t) = const (1.1)
Функциональная зависимость x от y в установившемся режиме называется статической характеристикой:
y = f (x) (1.2)
Для элементов автоматики основным является режим работы, при котором x и y не остаются постоянными. Такой режим работы называется динамическим.
Процесс перехода из одного установившегося состояния в другое установившееся состояние называется переходным процессом. Он является частным случаем динамического режима.
Для оценки работы системы автоматики в переходом процессе служат динамические характеристики:
Переходная характеристика– это временная характеристика, показывающая изменение во времени выходной величины y, вызванное подачей на вход системы автоматики единичного скачка x. Единичным скачком x называется изменение входной величины, например на 10, 1А. 1м.
Эта характеристика дает возможность определить, как поведет себя система автоматики (элемент) при любом воздействии на ее вход.
Передаточная характеристика показывает зависимость изменения во времени выходной величины (y) от входной величины (x) в переходном режиме принулевых начальных условиях. Нулевые начальные условия – перед началом работы все параметры системы равны нулю.
y (t) = f (x (t)) (1.3)
Частотные характеристики– показывает изменение выходной величины y при изменении частоты входного сигнала x. Различают амплитудно-частотную и фазо-частотную характеристики.
y = f (ω) (1.4)
Коэффициент передачи элемента – представляет собой отношение выходной величины y элемента к входной величине x. В зависимости от режима работы, в котором определяется коэффициент передачи элемента, различают:
а) Статический коэффициент преобразования
Кст = y / x (1.5)
б) Динамический коэффициент преобразования – показывает во сколько раз приращение выходного сигнала Δ y увеличится или уменьшится при приращении входного сигнала Δ x
Кдин = Δ x / Δ y (1.6)
в) Относительный коэффициент преобразования показывает отношение относительного приращения выходного сигнала y к относительному приращению входного сигнала x:
Котн = (Δ y / y) / (Δ x / x) (1.7)
Порог чувствительности это наименьшее (по абсолютному значению) значение входного сигнала, способное вызвать изменение выходного сигнала. Появление порога чувствительности вызывают как внешние так и внутренние факторы (трение, люфты, внутренние шумы, помехи и т.д.).Интервал между значением входного сигнала, не оказывающего воздействия на значение выходного сигнала, и значением входного сигнала, оказывающего воздействие на значение выходного сигнала, называется зоной чувствительности.
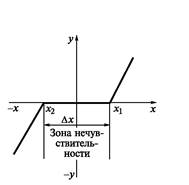 Рисунок 1.1
Рисунок 1.1
| На рисунке 1.1 показана характеристика элемента при наличии «мёртвого» хода. Из характеристики видно, что когда входная величинаХвх изменяется в пределах x1 до x2, выходная величина Хвых не изменяется и равна нулю. Значения x1 и x2 называт порогами чувствительности, а расстояние между ними ∆x - зоной не чувствительности. |
Дата добавления: 2015-10-26; просмотров: 1354;