МЭМС-акселерометр маятникового типа
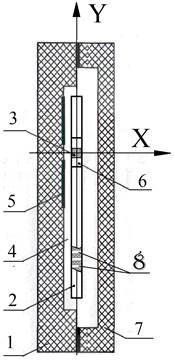
| Микромеханический акселерометр представляет собой капсулированный элемент, образованный корпусом 1, выполненным в виде платы из диэлектрического материала с напыленными на ней неподвижными электродами 5 емкостного датчика угла и электростатического датчика момента и диэлектрической крышки 7, скрепленной с корпусом 1. Основа акселерометра – монокристаллический кремниевый маятник 0,8´1,0´0,015 мм (инерционная масса2) подвешена с зазором на плате в виде маятника на упругих перемычках – торсионах 3 за опорный элемент 6. Торсионы представляют собой устройство демпфирования сечением 0,012 ´0,015 мм, которое позволяет инерционной массе останавливаться при полном диапазоне колебаний, защищая устройство от механического удара. Инерционная масса, торсионы и опорный элемент выполнены в форме прямоугольника, на поверхности которого равномерно распределены сквозные отверстия (2). |
Внутрь корпуса закачивается газовая смесь, которая обеспечивает демпфирование собственных колебаний инерционной массы 2. Крышка также выполняет функцию ограничителя перемещений инерционной массы 2 при вибрационных и ударных воздействиях.
Напылённые электроды емкостного датчика угла и электростатического датчика моменты выполнены единым элементом и в совокупности представляют собой электронную схему обработки сигналов.
Для данного варианта конструкции ось чувствительности (OX) ортогональна плоскости чувствительного элемента. Маятник изготовлен вместе с упругими торсионами по технологии "кремний на стекле".
Принцип функционирования - при действии ускорения в направлении оси чувствительности Х-Х инерционная масса 2 отклоняется от своего исходного состояния. При этом изменяются величины емкостей конденсатора, образованного неподвижными электродами 5 и инерционной массой 2. Съем информации производится с помощью емкостного датчика перемещений. Сигнал отклонения преобразуется электронной схемой и приводит к возникновению электростатического момента, стремящегося возвратить инерционную массу 2 в исходное состояние. В установившемся состоянии сигнал с выхода электронной схемы является выходным сигналом микромеханического акселерометра.
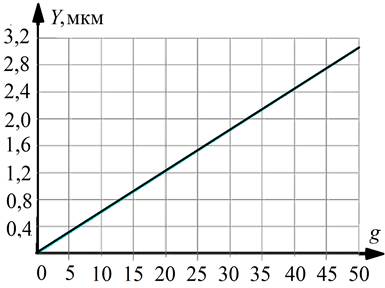
График зависимости перемещения чувствительного элемента маятникового типа от преобразуемого им линейного ускорения приведен на рисунке 6.5 [3].
|
| Рис. 6.5. График зависимости перемещения инерционной массы акселерометра маятникового типа от воздействия линейного ускорения |
Методология проектирования МЭМС базируется на классической электродинамике Максвелла, классической механике Ньютона и теоретической механике Лагранжа. Математическими моделями на междисциплинарном уровне являются дифференциальные уравнения в частных производных (ДУЧП). Примерами моделей могут служить уравнения математической физики с заданными краевыми условиями, характеризующими пространственное распределение переменных в начальный момент времени, и граничные условия, задающие значения этих переменных на границах рассматриваемой области.
В большинстве САПР, используемых при проектировании МЭМС, используются:
- метод конечных разностей (МКР);
- метод конечных элементов (МКЭ);
- метод граничных элементов (МГЭ).
МКР работает непосредственно с исходным ДУЧП и/или ОДУ, переводя его в общем случае в систему конечно-разностных уравнений, приближенно описывающую поведение искомой функции в i-ом узле сетки.
Метод конечных элементов (МКЭ) практически не имеет конкурентов в области численного решения задач инженерного анализа МЭМС.
У метода конечных элементов есть твердая теоретическая основа. Она базируется на математических теоремах, которые гарантируют асимптотическое приближение результата расчета поля к точному решению при уменьшении размеров конечных элементов, используемых в процессе решения. Он не работает непосредственно с исходным ДУ, а использует вариационную его трактовку в виде функционала, минимизация которого позволяет форсированно получить матрицы (так называемые «матрицы жесткости») конечных элементов, которые собственно и используются в САПР как модели конечных элементов.
САПР выполняет моделирование МЭМС в конечной области пространства с соответствующими граничными и/или начальными условиями. Геометрия задачи при этом автоматически разбивается генератором сетки на конечные элементы, которые покрывают всю область решения.
Когда сетка построена, в определенных точках объекта задаются начальные условия (точки закрепления, нагрузки и пр.), представляющие внешние и/или внутренние воздействия фазовых переменных на объект. Далее, выполняется собственно моделирование. Как правило, анализ влияния нескольких фазовых переменных на изменение состояния МЭМС и НЭМС выполняется по отдельности, поскольку затруднительно промоделировать их в связанной постановке. Основная сложность одновременного моделирования воздействия нескольких фаз на объект заключается в необходимости получения совместного согласованного решения уравнений, которыми описываются влияние каждой фазовой переменной на объект. Такие задачи называются «связанными»
Дата добавления: 2015-09-07; просмотров: 2789;