Трелевочного трактора, от среднего объема хлыста
| Vср, м3 | Число чокеров при трелевке за | |
| Комли | Вершины | |
| ДО 0,3 | 13-19 | 16-20 |
| 0,3-0,5 | 12-14 | 15-18 |
| 0,5-0,9 | 10-13 | 13-15 |
| 0,9-1,5 | 9-11 | 10-13 |
| 1,5 и более | 7-9 | 8-10 |
Таким образом, средний возраст рабочего-чокеровщика имеет тенденцию к повышению, а разработчики продолжают увеличивать мощность и грузоподъемность трелевочного трактора, делая его труд все более тяжелым, так как средний объем деревьев на лесосеке имеет наоборот тенденцию к уменьшению и, следовательно, количество чокеров на машине должно соответственно увеличиваться. Поэтому не случайно проводимыми производственными статистическими исследованиями [5] было установлено, что рейсовые нагрузки трелевочного трактора не превышают 0,5–0,55 от номинальной нагрузки машины. Недогрузка объясняется тем, что при наборе пачки из деревьев небольшого объема, равной грузоподъемности трактора (нагрузка на щит), резко возрастают затраты времени, и сменная производительность трелевочного трактора снижается.
Несмотря на недостатки бесчокерного трактора ТБ-1 такие же машины начали создаваться на базе трелевочных тракторов ТДТ-75 и ТТ-4, и получили соответственно названия ЛП-11 (1970-1971 гг.), ЛП-18, ЛП-18А и ЛП-18В*, позже – ЛП-18Г, отличающаяся от ЛП-18А вылетом манипулятора до 10 м.
Так, в статье [43] приведены такие высказывания:
«...Опыт работы машин ЛП-18 (см. рис. 5.4) показал, что наиболее целесообразно их использовать в укрупненных бригадах, работающих на базе двух трелевочных тракторов, один из которых должен быть ТТ-4 или
ТДТ-55. Это вызвано тем, что бесчокерная машина не приспособлена к трелевке на участках с заболоченной и холмистой местностью».
В связи с тем, что указанные выше недостатки трактора ТБ-1 были настолько очевидны, что на кафедре проектирования специальных лесных машин ЛТА была сделана попытка их устранения путем расширения возможностей машины за счет замены труда вальщика. С этой целью было изготовлено в 1969 году захватно-срезающее устройство ножевого типа, которое заменило захват. В результате лесопромышленный трактор ТБ-1 был превращен в валочно-пакетирующую машину. Испытания опытного образца проводились в Кастенском лесничестве Лисинского учебно-опытного лесхоза (1970 г.). Интерес к машине был настолько велик, что на лесосеку пришло много жителей поселка и хотя начался дождь никто не уходил, пока не были срезаны и уложены в коник десяток деревьев.
В результате испытаний было установлено:
– ЗСУ ножевого типа работоспособно и имеет высокую надежность;
время полного цикла на обработку одного дерева составляет в среднем 45–50 с;
– с одной стоянки возможна обработка двух-четырех деревьев;
– коэффициент использования технологического оборудования повышается до 0,4–0,5 при пакетировании деревьев на землю (без трелевки).
По результатам испытаний было принято решение продолжить научно-исследовательские работы по созданию валочно-пакетирующей машины ограниченной грузоподъемности. Для этих целей под руководством С.Ф.Орлова, В.М.Троязыковым была разработана захватно-срезающая головка с пильным (цепным) срезающим устройством. Беззажимное пиление ствола дерева обеспечивалось гидродомкратом с упором в будущий пень. Испытание макетного образца ВПТ на базе трактора ТБ-1 проводились вначале в Охтинском учебно-опытном лесхозе ЛТА, а затем в Лисинском лесхозе и на опытной базе ОТЗ (пос. Нелгомозеро КАССР), см. рис. 5.3, 5.5, 5.6. Первоначально машина была названа валочно-пакетирующе-трелевочная (ВПТМ ТБ-1В). В процессе испытаний ТБ-1В были получены достаточно хорошие результаты. Причем в процессе испытаний применялись два способа пакетирования: способ повала «от себя», когда не требо-
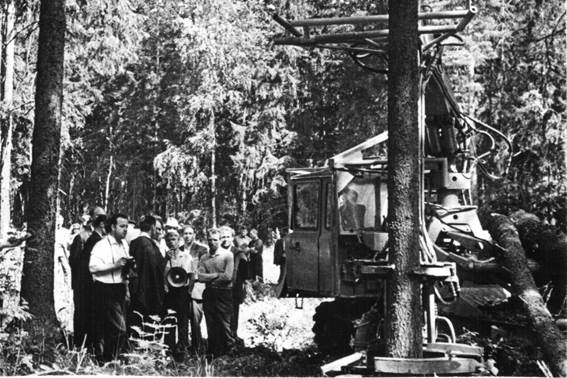
Рис. 5.3. ВПТМ на базе ТБ-1 конструкции ЛТА (показ машины на межвузовской конференции в Лисинском лесхозе в 1972 году)

Рис. 5.4. Трелевочный трактор ЛП-18
валось сохранять подрост, и способ предварительного наклона дерева после срезания на рукоять с последующим выносом его на технологический коридор, когда требовалось сохранять подрост. Испытания показали, что даже на сплошных рубках без сохранения подроста оператор машины ТБ-1В использовал в работе оба способа пакетирования. Мелкие и средние деревья диаметром до 30 см он пакетировал способом наклона «на рукоять», а крупные деревья пакетировал способом повала «от себя». В процессе испытаний первым способом заготовлено более 60% всех деревьев. В дальнейшем было принято окончательно называть новую машину валочно-трелевочной. Начиная с 1972 года, к работе по созданию ВТМ на базе ТБ-1 подключились ЦНИИМЭ, комбинат «Ленлес» и институт ЦНИИЛесосплава.
В период 1972–73 гг. по техническому заданию, разработанному академией с КБ ЦНИИЛесосплава, а затем на его заводе был спроектирован и изготовлен улучшенный образец ВТМ ТБ-1В (было изготовлено два экземпляра). В 1974 году была достигнута договоренность между ЛТА, ОТЗ и ЦНИИМЭ провести на опытной базе ОТЗ сравнительные испытания уже трех ВТМ: ВП-80 (ОТЗ), ТБ-1В (ЛТА) и ЛП-17 (ЦНИИМЭ).
В конечном итоге, наиболее удачной захватно-срезающей головкой оказалась конструкция ЦНИИМЭ. Недостатком работы ЗСУ ЛТА была неудачная конструкция упора (гидродомкрата), при работе которого наблюдались частые проскальзывания по стволу и, как следствие, не обеспечивалось беззажимное пиление. После срезания ЗСУ конструкции ОТЗ наблюдались частые сколы комлевой части дерева из-за большого валочного момента, создаваемого гидроцилиндром поворота срезающей головки. В конечном итоге, к серийному выпуску была рекомендована ВТМ конструкции ЦНИИМЭ ЛП-17.
Бесчокерный способ сбора и трелевки пачки деревьев или хлыстов вызвал необходимость внесения изменений и в конструкцию устройства для ее закрепления на машине.
Первая попытка бесчокерного удержания деревьев на машине при трелевке была осуществлена в 1950 году при испытании машины ЛК-1, созданной в ЛТА на кафедре станков и инструментов, под руководством А.Э. Грубе.
Удерживающее устройство содержало жесткие рычаги, поворачиваемые механическим путем.
Подвижные концы рычагов соединялись провисающим канатом, который служил опорой для уложенных сверху деревьев. При сведении рычагов внутрь канат замыкается в пространстве, образовывая петлю.
Основным недостатком такого устройства было то, что рычаги име-

Рис. 5.5 ВПТМ на базе ТБ-1 (демонстрация машины первому зам. министра Минлесдревпрома СССР Ф.Д.Вараксину, 1973 г.)
ли значительную металлоемкость, так как работали при трелевке на изгиб.
В 1952 году институтом НАТИ на базе КТ-12 был разработан опытный образец валочно-трелевочного трактора под маркой ВТТ-1. Это была первая попытка создания машины для механизации процессов повала, пакетирования и увязки деревьев в пачки бесчокерным способом. Совмещение пакетирующего рычага с обвязочным канатом позволило упростить механизм замыкания обвязочного каната на пачку, однако, значительное разнесение концов каната по длине кониковой балки сделало невозможным поворот машины с закрепленной пачкой при неповоротном конике.
Поэтому для устранения этого, закрепляющий механизм был выполнен поворотным.
В 1961 году одновременно в ЛТА и ЦНИИМЭ были начаты работы по созданию конструкций по бесчокерному удержанию деревьев или хлыстов в пачках при трелевке. На рис. 5.1, 5.7 показан первый опытный образец для бесчокерного сбора и трелевки, изготовленный в ЛТА. Устройство для удержания пачки было выполнено с жесткими рычагами, оси поворота
которых разнесены по краям кониковой балки. Образец машины для бесчокерной трелевки ЦНИИМЭ содержал устройство для закрепления деревьев, состоящее из полуэллиптического коника с жесткими рычагами, оси поворота которых также разнесены по краям балки.
В процессе испытаний этих машин было выявлено, что постоянная кривизна рабочих поверхностей рычагов не обеспечивает необходимого контакта рычагов с закрепляемыми деревьями.

Рис. 5.6. Испытания ВПТМ в Лисинском учебно-опытном лесхозе Ленинградской области
Рис. 5.7. Опытный образец машины ЛТА

Рис. 5.8.Машина ВТТ-1

Рис. 5.9. Общий вид машины ЛТА с закрепленной пачкой

Рис. 5.10. Трактор ТБ-55 с закрепленной пачкой
Образуются «окна», в которых концы деревьев удерживаются только за счет сил трения и сцепления, которых недостаточно для удержания деревьев при трелевке.
В этой связи для второго опытного образца трактора с гидроманипулятором в ЛТА было разработано удерживающее устройство с тросовой петлей треугольной формы /рис.5.9/.
Испытания машины показали работоспособность удерживающего устройства, названного впоследствии коником. Наличие формирующих элементов в виде отрезков каната с пружинами позволили обеспечить необходимую исходную форму пачки перед закреплением.
Основным недостатком устройства являлись затруднения при укладке концов деревьев внутрь канатной петли.
Впоследствии Онежским тракторным заводом был разработан коник, содержащий обвязочный канат, состоящий из двух отрезков, натяжение которых при закреплении пачки обеспечивалось поворотными шарнирно-сочленеными составными рычагами, приводимыми в действие гидроцилиндром. Укладка стволов деревьев манипулятором производилась сверху. Эта конструкция оказалась удачной и стала основной у серийно выпускаемых трелевочных тракторов ТБ-1 и валочно-трелевочных машин ВП-80 и ЛП-17А.
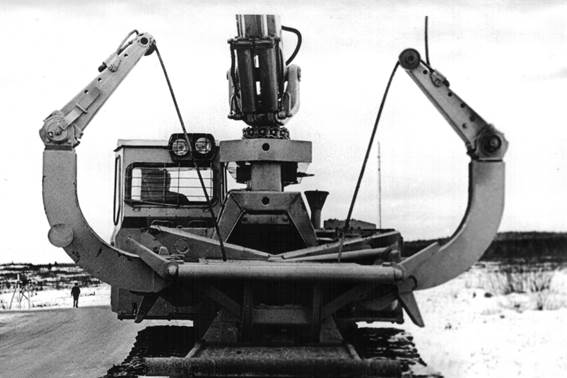
Рис. 5.11. Коник серийно выпускаемых тракторов ОТЗ
Подводя итог, можно отметить, что начало семидесятых годов ознаменовалось широким использованием на лесосечных работах манипуляторов, вначале в качестве погрузочных устройств, а затем и устройств, обеспечивающих доставку захватно-срезающих головок к дереву и укладку последнего после срезания на машину или волок.
6. Механизация лесозаготовок (1964–1980 гг.)
Первые образцы валочно–пакетирующих машин были созданы в СССР еще в 50-х годах. Эти машины конструкции ЦНИИМЭ ВПМ-1 и ВПМ-4 были выполнены на базе тросовых (канатных) экскаваторов, но дальнейшего развития не получили.
Первой в мире валочно-пакетирующей машиной манипуляторного типа следует считать машину конструкции ЛатНИИЛХП «Дятел-1», созданную в 1964 году.
Предназначена эта машина была для ведения рубок ухода за лесом. В начале в качестве базы был использован сельскохозяйственный колесный трактор Т-28 Владимирского тракторного завода. Работала машина по способу бесповальной рубки деревьев, то есть срезанное дерево выносилось в технологический коридор в вертикальном положении. Предпосылкой для разработки ВПМ явилось то, что по результатам исследования изменений таксационных элементов в насаждениях разных пород и возраста при прокладке густой сети технологических коридоров при рубках ухода, проводимых в 1964–1965 гг. в ходе экспериментальной проверки разных технологических схем разработки лесосек были установлены возможные четыре технологические схемы для перемещения срезанного дерева до технологического коридора:
1) валка деревьев и их перемещение по земле вершиной вперед;
2) валка деревьев и их перемещение по земле комлем вперед;
3) срезание деревьев, подъем вверх, вывод их из полога насаждения и перемещение до технологического коридора;
4) срезание деревьев, подъем до частичного вывода кроны дерева из полога насаждения и перемещения до технологического коридора.
В результате сравнения этих четырех схем было признано [13]:
– первая и вторая схемы не обеспечивают выполнения лесотехнических требований по сохранению лесной среды (подроста, почвенного покрова и т.д.) и, самое главное, не решают основной задачи – механизации процесса лесозаготовок;
– третья схема конструктивно трудно осуществима;
– четвертая схема является наиболее перспективным технологическим вариантом.
Для практической реализации четвертой схемы в институте ЛатНИИЛХП в 1964 году и были начаты опытно-конструкторские работы по созданию специальной машины.
Технологическое оборудование машины (см. рис. 6.1) состояло из поворотной колонны, стрелы, захватно-срезающего и формирующего уст-

Рис. 6.1. Валочно-пакетирующая машина «Дятел-1»
ройств.* По результатам испытаний первого экспериментального образца были разработаны лесотехнические требования на машину «Дятел-1», которые в 1969 году были утверждены Гослесхозом СМ СССР и уже в качестве базы опытного образца был использован более мощный трактор «Беларусь» МТ3-52. Максимальный диаметр срезаемых деревьев был 18 см, а в последующих образцах – до 20 см. Опытный образец машины «Дятел-1» в 1966 году прошел заводские и ведомственные испытания, а в 1967 и 1969 гг. – государственные испытания. В 1968 году заводом «Ригалесмаш» была изготовлена опытная партия машины «Дятел-1», которая прошла произ-

Рис. 6.2.Экспериментальный образец ВПМ «Дятел-2»

Рис. 6.3.Валочно-пакетирующая машина ЛП-2
водственную проверку в различных регионах СССР. Конструктивные усовершенствования машины «Дятел-1» производились вплоть до 1971 г. В период с 1969–1970 гг. были изготовлены два образца «Дятел-1» на базе промышленной модификации трактора Липецкого завода Т-50 АП и специального лесохозяйственного Т-5Л этого же завода. В результате доработок производительность машины была доведена до 15–20 м3 плотных в смену. Время выполнения рабочего цикла составило соответственно 55,3, 63,0 и 40,2 с (это для образца на базе Т-5Л). Результаты испытаний машин «Дятел-1» явились в дальнейшем ценным научным материалом для создания многооперационных лесосечных машин.
В конце 1966 года в ЛатНИИЛХП на базе трелевочного трактора ТДТ-55 был изготовлен экспериментальный образец машины «Дятел-2» с вылетом стрелы 5,5 м (см. рис. 6.2). В качестве срезающего устройства вначале был применен нож, но результаты испытаний этого устройства были неудовлетворительными, и в дальнейшем нож был заменен цепной пилой.
В 1967 году эту машину переоборудовали манипулятором с вылетом 10,5 м и провели производственные испытания на проходных и сплошных рубках. Средняя продолжительность полного цикла обработки дерева на проходных рубках составила 109 с, на сплошных рубках – 88 с. После внесения ряда конструктивных усовершенствований в 1968 году на Великолукском заводе «Торфмаш» и на опытном заводе «Ригалесмаш» были изготовлены опытные образцы – лесопромышленные ЛП-2 (см. рис. 6.3) и лесохозяйственные «Дятел-2». Лесопромышленный вариант был изготовлен с вылетом манипулятора – 7,5 м и грузоподъемностью 1200 кг.
В 1969 году заводские испытания машины ЛП-2 были закончены. По результатам испытаний машины было принято решение о выпуске промышленных образцов. Однако доработка машины ЛП-2 продолжалась вплоть до начала серийного выпуска в 1971 году.
Таким образом, машина ЛП-2 явилась первой промышленной ВПМ не только у нас в стране, но и в мировой практике. Технологический процесс сплошных рубок машиной ЛП-2 с сохранением подроста производился следующим образом. С полосы шириной до 14 м срезались и укладывались на коник деревья. В зависимости от характера насаждения, с одной стоянки спиливалось 5–8 деревьев. Сформированная на конике пачка деревьев объемом до 5 м3 сбрасывалась на землю для последующей трелевки подборщиком. (Машина может укладывать деревья и непосредственно на землю). На обработку одного дерева в среднем затрачивалось 60–90 с. При среднем объеме дерева 0,2–0,3 м3 средняя сменная производительность достигала 50–70 м3.

Рис. 6.4. Валочно-пакетирующая машина ЛП-19А
Какие же можно сделать выводы по использованию машины этого типа?
Дата добавления: 2015-09-02; просмотров: 4537;