Применение и классификация кулачковых механизмов
При проектировании механизмов часто нужно знать закон движения ведомого звена. Если проектируются механизмы с низшими кинематическими парами, то закон движения известен – это либо прямая линия (например, для строгания), либо окружность (сверление). Но чаще ведомое звено совершает сложное движение по заданному закону. По данной траектории и проектируют кулачковые механизмы.
Кулачковые механизмы получили широкое распространение в машинах и приборах. Например, в двигателях внутреннего сгорания (в механизмах газораспределения) они используются для открывания и закрывания впускных клапанов, в токарных полуавтоматах для регулирования хода резца и т.д. Поэтому, в зависимости от назначения, разновидностей кулачковых механизмов великое множество. Основное достоинство: простота изготовления и получение любой траектории ведомого звена – толкателя.
Простейший кулачковый механизм состоит из кулачковой шайбы 1 (или просто кулачка); ролика 2, который огибает кулачковую шайбу; толкателя 3 (штанги) и опоры 4 (рисунок 4.1 а ,б).
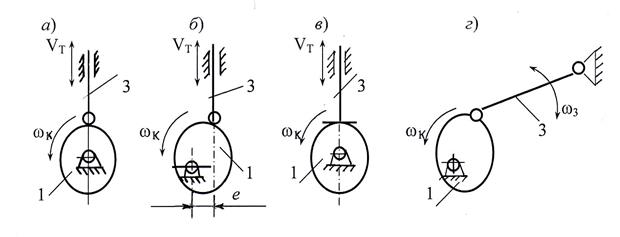
а - с поступательно движущимся центральным роликовым толкателем;
б - с поступательно движущимся смещенным роликовым толкателем;
в - с поступательно движущимся тарельчатым (плоским) толкателем;
г - с качающимся роликовым толкателем (с коромыслом).
Рисунок 4.1 - Схемы плоских кулачковых механизмов
Ведущее звено в кулачковых механизмах называется кулачком. На кинематических схемах кулачок обозначается цифрой 1. Ведомое звено называется толкателем, обозначается предпоследней цифрой.
По характеру движения толкателя кулачковые механизмы делятся:
1. с поступательно движущимся толкателем (рисунок 4.1, а-в);
2. с качающимся толкателем (рисунок 4.1, г).
Если траектория движения толкателя совпадает с осью вращения кулачка, то такой механизм называется кулачковым механизмом с центральным роликовым толкателем (рисунок 4.1, а). Если траектория движения толкателя не совпадает с осью вращения кулачка (образуется расстояние е – эксцентриситет или смещение), то такой механизм называется кулачковым механизмом со смещенным роликовым толкателем (рисунок 4.1, б).
Кулачок очерчен профилем. Профиль кулачка – сечение кулачка плоскостью, параллельной плоскости движения кулачка.
Кулачковые также как и все другие механизмы бывают:
1. Плоские – кулачковые механизмы, движение звеньев которых осуществляются в параллельных плоскостях (рисунок 4.1, а-г).
2. Пространственные – кулачковые механизмы, все точки которых движутся по замкнутым пространственным кривым (рисунок 4.2, а).
Плоские кулачковые механизмы также различают по характеру контакта кулачка и толкателя, а также по характеру движения кулачка и толкателя (таблица 4.1).
Таблица 4.1 - Классификация кулачковых механизмов по характеру контакта
| Характер движения кулачок- -толкатель | Вид контакта | |||
| Ролик | Прямая | Точка | Кривая | |
       В-В
В-В
|    ωК ωТ ωК ωТ
|      ωК ωТ ωК ωТ
|   ωК ωТ ωК ωТ
|     ωК ωТ ωК ωТ
|
     В-П
В-П
|  ωК VT ωК VT
|    ωК VT ωК VT
|  ωК
VT ωК
VT
| ωК VT
|
   П-В
П-В
|  ωТ
VК ωТ
VК
|     ωТ
VК ωТ
VК
|  ωТ
VК ωТ
VК
|     ωТ
VК ωТ
VК
|
 П-П
П-П
|  VT
VК VT
VК
| VT
VК
|   VT
VК VT
VК
| |
| Примечание. ωК, ωТ – угловые скорости кулачка и толкателя; VT, VК - линейные скорости толкателя и кулачка. |
По числу звеньев кулачковые механизмы делятся на
Ø простые – состоят из 3-х звеньев (рисунок 4.1).
Ø сложные – состоят из более чем 4-х звеньев (рисунок 4.2, б).
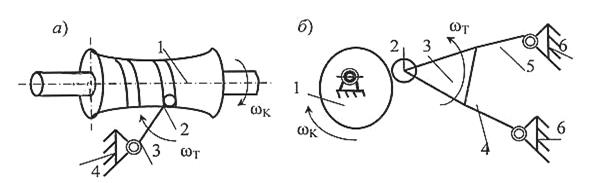
а - пространственный кулачковый механизм;
б - сложный кулачковый механизм.
Рисунок 4.2
При работе кулачковых механизмов необходимо постоянное соприкосновение ведущего и ведомого звеньев. Это касание может быть обеспечено: а) чисто геометрически, если выполнить кулачок в форме паза, боковые поверхности которого огибают ролик (рисунок 4.3, а);
б) с помощью пружины или силовое замыкание (рисунок 4.3, б).

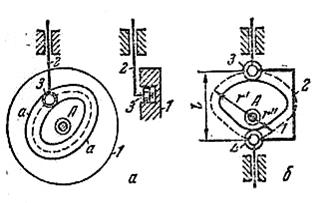
а - с геометрическим замыканием с пазовым кулачком;
б - с геометрическим замыканием с двумя кулачками в рамке;
в - с силовым замыканием с поступательно движущимся толкателем;
г - с силовым замыканием с качающимся коромысловым толкателем.
Рисунок 4.3 - Плоские кулачковые механизмы
Достоинства кулачковых механизмов: простота конструкций; возможность получить любой закон движения толкателя.
Недостатки: быстрый износ в высшей кинематической паре.
При проектировании кулачковых механизмов решаются 2 задачи:
1. Анализ работы кулачкового механизма – по заданным размерам и профилю кулачка определяется закон движения ведомого звена (толкателя);
2. Синтез кулачкового механизма – по заданному закону движения толкателя определяются размеры кулачка.
В дальнейшем мы рассмотрим только 2-ую задачу проектирования.
Основные понятия и определения, связанные
Дата добавления: 2015-10-19; просмотров: 2154;