основы кинематики и динамики вращательного движения твердого тела. Законы сохранения
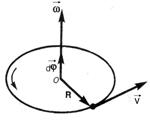
При вращении твердого тела вокруг неподвижной оси отдельные точки тела описывают окружности, центры которых лежат на оси вращения. Пусть некоторая точка движется по окружности радиуса R и за бесконечно малый промежуток времени dt совершает поворот на угол  (малый поворот рассматривается как вектор, модуль которого равен углу поворота dφ, а направление подчиняется правилу правого винта (рис.1)).
(малый поворот рассматривается как вектор, модуль которого равен углу поворота dφ, а направление подчиняется правилу правого винта (рис.1)).
 Угловой скоростью
Угловой скоростью  называется векторная физическая величина, определяемая первой производной угла поворота по времени:
называется векторная физическая величина, определяемая первой производной угла поворота по времени:
 .
.
Вектор  , как и вектор
, как и вектор  , направлен вдоль оси вращения и подчиняется по правилу правого винта (рис.1). Рис.1
, направлен вдоль оси вращения и подчиняется по правилу правого винта (рис.1). Рис.1
Угловым ускорением  называется векторная физическая величина, определяемая первой производной угловой скорости по времени:
называется векторная физическая величина, определяемая первой производной угловой скорости по времени:
 .
.
При ускоренном движении вектор  сонаправлен с (рис.2, а), при замедленном – противонаправлен (рис. 2, б).
сонаправлен с (рис.2, а), при замедленном – противонаправлен (рис. 2, б).
 а
а
|
 б
б
|
Рис.2.
Моментом инерции I материальной точки называется скалярная физическая величина, определяемая произведением ее массы m на квадрат радиуса окружности r, по которой она может двигаться относительно заданной оси вращения ОО' (рис.3, а).

Если твердое тело, вращающееся относительно некоторой заданной оси ОО', представить в виде системы материальных точек массой dm, и просуммировать моменты инерции этих, так называемых, элементарных масс, то получим
момент инерции всего тела Рис.3.
 ,
,
здесь ri – радиус вращения i – той элементарной массы, а интеграл берется по всему объему тела (рис. 3, б). Для однородных тел, для которых плотность  (где m – масса тела, а V – его объем, т.е. плотность определяется массой, заключенной в единице объема), момент инерции будет вычисляться по формуле
(где m – масса тела, а V – его объем, т.е. плотность определяется массой, заключенной в единице объема), момент инерции будет вычисляться по формуле
 .
.
|
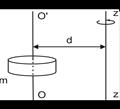
 , где m - масса тела, d - расстояние между осями (рис. 4).
, где m - масса тела, d - расстояние между осями (рис. 4).
|
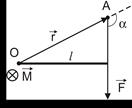 Моментом силы
Моментом силы  относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиус-вектора
относительно неподвижной точки О называется физическая величина, определяемая векторным произведением радиус-вектора  , проведенного из точки О в точку А приложения силы, на силу
, проведенного из точки О в точку А приложения силы, на силу  (рис.5):
(рис.5):  .
.
Модуль момента силы равен  , где α – угол между
, где α – угол между  и
и  ,
,  - плечо силы
- плечо силы  (l - длина перпендикуляра, опущенного из точки О на направление действия силы (рис. 5)).
(l - длина перпендикуляра, опущенного из точки О на направление действия силы (рис. 5)).
Основное уравнение динамики вращательного движения твердого тела относительно неподвижной оси:  , то есть направление
, то есть направление  совпадает с направлением
совпадает с направлением  (рис. 4). Моментом силы Mz относительно неподвижной оси ZZ' называется проекция этого момента на данную ось.
(рис. 4). Моментом силы Mz относительно неподвижной оси ZZ' называется проекция этого момента на данную ось.
Кинетическая энергия измеряется работой, которую тело может произвести благодаря инерции при затормаживании тела до полной остановки. Кинетическая энергия материальной точки массы m при поступательном движении со скоростью V определяется, как известно, формулой Ек =  . При вращательном движении роль массы m выполняет момент инерции I, а вместо скорости V выступает угловая скорость ω, и формула кинетической энергии при вращатель-ном движении материальной точки приобретает вид: Eк вращ =
. При вращательном движении роль массы m выполняет момент инерции I, а вместо скорости V выступает угловая скорость ω, и формула кинетической энергии при вращатель-ном движении материальной точки приобретает вид: Eк вращ =  .
.
Потенциальная энергия измеряется работой, которую тело может совершить при перемещении его из одного пространственного положения в другое. Так, потенциальная энергия тела массы m, поднятого на высоту h над поверхностью Земли
Eпот = mgh. Потенциальная энергия упруго деформированной пружины Епот=  , где k – коэффициент упругости, х – деформация пружины. Потенциальная энергия при закручивании стержня Епот=
, где k – коэффициент упругости, х – деформация пружины. Потенциальная энергия при закручивании стержня Епот=  , где D – константа, зависящая от упругих свойств стержня при его кручении (так называемый модуль кручения), αо – угол деформации при закручивании.
, где D – константа, зависящая от упругих свойств стержня при его кручении (так называемый модуль кручения), αо – угол деформации при закручивании.
Закон сохранения механической энергии гласит: полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остается постоянной, возможны лишь превращения кинетической энергии в потенциальную и наоборот. Напомним, что консервативными называют силы, работа которых по замкнутой траектории равна нулю. Так, при закручивании упругого стержня (нити) закон сохранения энергии может быть записан как  .
.
Теория метода и описание установки
Момент инерции тел правильной формы может быть вычислен теоретически. Если же тело имеет сложную форму (рис. 6), то теоретически определять его момент инерции трудно. Одним из методов экспериментального определения момента инерции тела является метод крутильных колебаний.
Используемый в данной работе крутильный маятник представляет собой металлическую рамку с приспособлениями для удержания исследуемых тел в горизонтальном положении, подвешенную на упругой нити (см. рис. 7, 8). На рамке закреплены два съёмных груза m1, что позволяет изменять момент инерции колебательной системы (см. рис. 8, 9).

Рис. 6. Твёрдые тела, моменты инерции которых нужно определить (металлические параллелепипеды и куб).

Рис. 7. Приспособление для удержания исследуемых тел в горизонтальном положении.

Рис. 8. Внешний вид установки для измерения моментов инерции различных твёрдых тел методом крутильным колебаний.
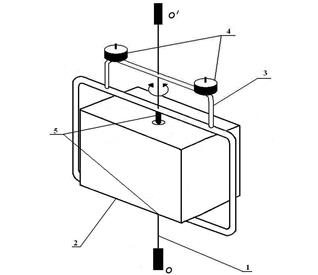
Рис. 9. Схематическое устройство крутильного маятника с исследуемым телом.
1 – упругая нить
2 – исследуемое тело
3 – рамка
4 – съёмные грузы (m1)
5 – держатели исследуемого тела
6 – d – расстояние от центров масс грузов до оси ОО’ (d = 0,0525 м)
7 – r – радиус грузов (r = 0,015м).
При отклонении рамки на небольшой угол система начинает совершать колебательные движения в горизонтальной плоскости вокруг вертикальной оси OO’ (рис. 9). При вращении рамки в нити возникают упругие силы, которые стремятся вернуть рамку в положение равновесия.
Уравнение колебаний может быть получено с помощью основного уравнения динамики вращательного движения твёрдого тела:
 ,
,
где М - момент сил упругости, ε – угловое ускорение маятника с грузами m1. В свою очередь M = – D α. Знак (-) указывает на то, что этот момент возвращает систему в состояние устойчивого положения равновесия. Тогда
I1ε = –D α , (1)
где α – угол поворота рамки с закрепленным на нём исследуемым телом; D - модуль кручения; I1 – момент инерции маятника с грузами m1.
Учитывая, что угловое ускорение ε =  , перепишем уравнение (1) в виде
, перепишем уравнение (1) в виде
 .
.
Введя обозначение  , приходим к уравнению
, приходим к уравнению
 = 0.
= 0.
А это - дифференциальное уравнение гармонических колебаний и его решением является уравнение вида: α = α 0 sin ωt. Поскольку период колебаний  , то формула для определения периода колебаний крутильного маятника с грузами m1 запишется в виде:
, то формула для определения периода колебаний крутильного маятника с грузами m1 запишется в виде:
T1 =  , (2) откуда
, (2) откуда  . (2а)
. (2а)
Уменьшим момент инерции системы на величину ∆I, сняв оба груза m1. Согласно теореме Штейнера, можно найти изменение момента инерции системы ∆I = 2(Iс + m1d2), где Iс =  – момент инерции грузов - дисков (массой m1 и радиуса r) относительно собственной оси симметрии, через d обозначено расстояние от оси ОО' до оси грузов. Значение нового периода колебаний системы Т для системы со снятыми грузами m1:
– момент инерции грузов - дисков (массой m1 и радиуса r) относительно собственной оси симметрии, через d обозначено расстояние от оси ОО' до оси грузов. Значение нового периода колебаний системы Т для системы со снятыми грузами m1:
 , (3) откуда
, (3) откуда  . (3а)
. (3а)
Совместное рассмотрение (2а) и (3а) позволяет получить значение для момента инерции Iр (момента инерции пустой рамки).
 . (4)
. (4)
Если снять грузы m1 и установить в рамке исследуемый образец согласно (рис. 7), то проведя аналогичные приведённым выше рассуждениям, его момент инерции можно записать
 , (5)
, (5)
где Iо – момент инерции исследуемого образца, Iр – момент инерции пустой рамки.
Измерения
Они сводятся к определению периодов колебания T, T1 и T2 не нагруженного, нагруженного (с установленными грузами m1) и с установленным исследуемым образцом, крутильного маятника. Значение m1, d и параметры образцов, необходимые для расчётов моментов инерции, указаны на рабочем месте.
Порядок выполнения
1. Определяем Т1 - период колебаний нагруженного маятника. Включаем в сеть электронный блок для отсчета времени и определения числа колебаний, нажимаем кнопку «сброс», осторожно поворачиваем рамку с мишенью до захвата ее электромагнитом установки. После этого нажимаем кнопку «пуск», отсчитываем n = 10 ÷ 12 периодов колебаний и нажимаем «стоп». Записываем время t1, за которое совершилось n колебаний. Определяем  . Измерения проводим три раза и определяем среднее значение T1.
. Измерения проводим три раза и определяем среднее значение T1.
2. Для определения периода колебаний ненагруженного маятника T снимаем оба груза m1, нажимаем «сброс», поворачиваем мишень до захвата ее электромагнитом, нажимаем «пуск» и после n = 10 ÷ 12 колебаний нажимаем «стоп». Записываем время t. Определяем  . Измерения проводим три раза и определяем среднее значение T.
. Измерения проводим три раза и определяем среднее значение T.
3.Устанавливаем на рамке исследуемый образец согласно рис. 7. Для определения периода колебаний T2 – поворачиваем мишень до захвата её электромагнитом, нажимаем пуск и после n = 10 ÷ 12 колебаний нажимаем «стоп». Записываем время t2. Определяем  . Измерения проводим три раза и определяем среднее значение T2. По формуле (5)
. Измерения проводим три раза и определяем среднее значение T2. По формуле (5)

определяем момент инерции исследуемого образца. Величину Iр определяем по формуле (4).
4. По указанию преподавателя провести определения момента инерции остальных образцов (рис. 6). Параметры образцов, как было указано выше, приведены на рабочем месте.
Вычисление погрешностей
1. Относительная погрешность определения момента инерции тела εо вычисляется по формуле
 . (6)
. (6)
Так как  , то
, то  , и доверительный интервал для T определяется как
, и доверительный интервал для T определяется как  . Доверительные интервалы для величин m1, d, r, и t приведены в таблице измерений.
. Доверительные интервалы для величин m1, d, r, и t приведены в таблице измерений.
Абсолютная погрешность момента инерции исследуемого тела вычисляется по формуле
 . (7)
. (7)
Таблица прямых и косвенных измерений
| N | d | Δd | m1 | Δm1 | r | Δr | n | без грузов m1 | с грузами m1 | с телом | Io | εo | Δ Io | |||||||
| t | Т | Δt, Δt1, Δt2 | ΔT1 | t1 | Т1 | ΔT1 | t2 | Т2 | ΔT2 | |||||||||||
| - | м | м | кг | кг | м | м | - | c | c | c | с | с | с | с | кг∙м2 | - | кг∙м2 | |||
| 0,0005 | 0,0001 | 0,0005 | ||||||||||||||||||
| 0,01 | ||||||||||||||||||||
| cр | - | - |
2. Сравнение теоретических и экспериментальных значений моментов инерции исследуемых образцов.
Определим теоретическое значение момента инерции тела по формуле
 .
.
Здесь a, b и c - размеры исследуемого образца (м), а ρ - его плотность (кг/м3).
Зная теоретическое (  ) и экспериментальное (
) и экспериментальное (  ) значения моментов инерции тела, определить относительную погрешность полученных значений по формуле
) значения моментов инерции тела, определить относительную погрешность полученных значений по формуле
 . (8)
. (8)
3. Сравнить относительные погрешности полученные по формуле (8) со значениями в таблице.
Контрольные вопросы.
1. Объясните устройство крутильного маятника.
2. Как определяется направление угловой скорости и углового ускорения?
3. Что называют моментом инерции материальной точки? Твердого тела?
4. Сформулируйте теорему Штейнера.
5. Дайте определение момента силы. Как определяется направление момента силы?
6. Сформулируйте закон сохранения механической энергии.
7. Запишите формулу для определения периода колебаний крутильного маятника.
8. Назовите единицы измерения в «СИ» величин, входящих в рабочую формулу для определения момента инерции твёрдого тела.
Рекомендуемая литература
1. Трофимова Т.И. Курс физики. - М.: Высш. школа, 2001.
2. Иродов И.Е. Механика. Основные законы. - М. – СПб.: Физматлит, 2001.
3. Савельев И.В. Курс общей физики. В 5 кн. Кн.1. Механика: учеб. пособие для втузов. - М.: Астрель, 2002.
| <== предыдущая лекция | | | следующая лекция ==> |
| Определение коэффициентов трения качения и трения скольжения с помощью наклонного маятника | | | ГЕОДЕЗИЧЕСКИЕ ЗАДАЧИ И ПОЛЕВЫЕ РАБОТЫ |
Дата добавления: 2015-09-07; просмотров: 1297;