Тяговый электрический двигатель постоянного тока
Тема – «Конструкция ТЭД».
Содержание: Основные элементы конструкции ТЭД, принцип действия ТЭД Физические процессы в ТЭД. Режимы работы.
Тяговый электрический двигатель постоянного тока
4.4.1. Принцип работы электродвигателя постоянного тока
Из курса физики средней школы известно, что при помещении проводника, по которому от источника энергии протекает электрический ток IПР (сплошная стрелка на рис. 4.18) однородное магнитное поле с индукцией В, на него будет действовать сила FПР, которая вызовет его поступательное движение в направлении этой силы. Возникающая сила (по закону Ампера), Н.
 (4.29)
(4.29)
где I - сила тока (в дальнейшем просто «ток»), А;
В- индукция магнитного поля, Тл;
lпр — длина проводника, м.
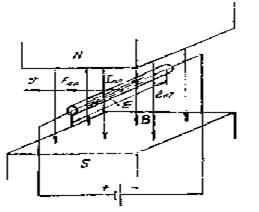 |
Рис.4.18
Направление действия силы определяют правилом «левой руки»: если вектор магнитной индукции направлен «в ладонь», вектор тока — по вытянутым пальцам левой руки, то .отогнутый большой палец покажет направление действия возникшей электромагнитной силы. Под действием этой силы будет происходить, поступательное движение проводника. Мнемоническое правило: Левая рука— двигатель.
При движении проводника в магнитном поле в нем возникает электродвижущая сила (ЭДС). По закону Ленца, В:
 (4.30)
(4.30)
где v —скорость движения проводника в машинном поле, м/с.
Направление ЭДС (штриховая стрелка на рис. 4.18) определяют правилом «правой руки»: если вектор магнитной индукции направлен «в ладонь», а направление движения совпадает с отогнутым большим пальцем, то вытянутые пальцы правой руки покажут направление генерируемой ЭДС. Мнемоническое правило: правая рука — генератор.
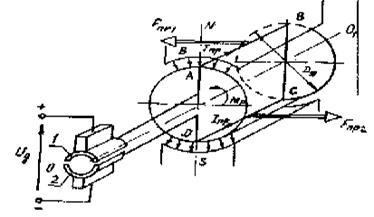 |
Рис.4.19
Если из двух проводников АВ и CD (рис. 4.19) сделать«рамку» ABCD, разместить на стальном цилиндре с осью вращения О – О1 , помещенном между полюсами N и S, иподключить ее к источнику энергии, то по ней будет протекать ток Iпр и на каждый проводник будет действовать сила FПР(Fnp1на проводник АВ и Fnp2— на CD). Таким образом, возникает пара сил Fnpl—Fnp2,создающих вращающий момент«рамки» Mp = FnрD(где D — расстояние между проводниками, то есть диаметр цилиндра), направленный против часовой стрелки. В этом же направлении цилиндр с «рамкой» начнет вращаться под действием Мр.
На рис. 4.20, а показано это положение «рамки» в поперечном разрезе. Знак + указывает, что ток идет «от нас», а - «к нам». Здесь же показана магнитная система, по которой замыкается магнитный поток Ф (штриховые линии), создающий индукцию В = Ф/S в воздушном зазоре между цилиндром и полюсами. Рамка соединена с двумя изолированными между собой полукольцами, которые также закреплены на оси О-О1Ток от источника энергии подводится к полукольцам через неподвижные щетки
(скользящий контакт).
Рис.4.20
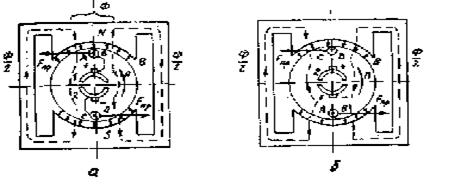 |
Нетрудно убедиться в том, что при расположений «рамки», повернутом на 180° относительно положения, изображенного на рис. 4.20, а, направление тока в верхнем проводнике CD, подключенном к полукольцу 2, сохранится таким же, как и в проводнике АВ на рис. 4.20, а. Аналогичные рассуждения относятся к проводнику АВ. Следовательно, направление вращающего момента сохранится прежним (рис. 4.20,.б). Таким образом, для обеспечения постоянства направления вращающего момента необходимо после каждого поворота рамки на 180° осуществлять изменение тока в проводнике. Эту функцию выполняют полукольца со щетками. Рассмотренный процесс вращения «рамки» является принципом работы электродвигателя постоянного тока, который превращает подведенную электрическую энергию в механическую энергию вращательного движения.
Заметим, что при вращении «рамки» в магнитном поле ЭДС, генерируемая в ней, направлена противоположно по отношению к току, поэтому её называют в двигателе противоЭДС. Ток, протекающий по «рамке» при ее вращении,
 (4.31)
(4.31)
где U — напряжение, подводимое к щеткам; В
r—активное сопротивление «рамки».
В реальном двигателе имеется множество образующих обмотку якоря, «рамок», каждая из которых подключена к соответствующим сегментам (вместо полуколец при одной. «рамке»), образующим коллектор двигателя.
4.4.2. Основные элементы конструкции электродвигателя постоянного тока
Электродвигатель состоит из вращающейся части — якоря и неподвижной — остова. Рассмотрим элементы конструкции двухполюсного электродвигателя (рис. 4.21). Якорь выполнен в виде стального цилиндра 8 диаметром DЯи длиной lЯ, набранного из отдельных листов специальной электротехнической стали и закрепленного на валу 11, в пазах которого расположено множество «рамок», образующих обмотку якоря 13. На валу якоря закреплен коллектор 2, представляющий собой- множество сегментов (.коллекторных пластин), изолированных друг от друга. «Рамки» подключены (припаяны) к коллекторным пластинам. При одной «рамке», рассмотренной выше, число коллекторных пластин — две. Напряжение U от источника электрической энергии подводится к коллектору 2 через угольные щетки 3, укрепленные в неподвижных щеткодержателях 4.
Вал якоря вращается в подшипниках 1 и 10, расположенных в подшипниковых щитах 9, закрывающих остов двигателя 6 с обеих сторон.
В остове двигателя укреплены сердечники главных полюсов 7, с помощью которых в воздушном зазоре между якорем и внутренними поверхностями сердечников образуется магнитное поле. Для его создания на сердечниках полюсов укреплены катушки 5, которые при протекании по ним тока создают магнитодвижущую силу (МДС), являющуюся причиной возникновения магнитного потока Ф (штриховые линии на рис. 4.21,6). Он замыкается по магнитной цепи машины, выполненной для увеличения
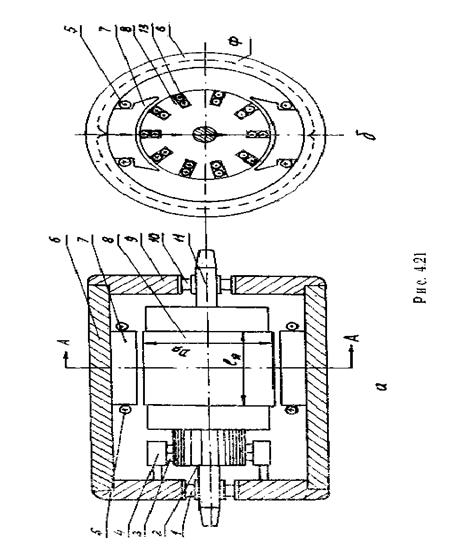 |
магнитной проводимости из ферромагнитных материалов.
При изображении машины постоянного тока на схема используют условные обозначения, установленные государственным общесоюзным стандартом (ГОСТом), которые приведены на рис.4:22: а — обмотка якоря, б и в—-обмотки возбуждения в зависимости от ее
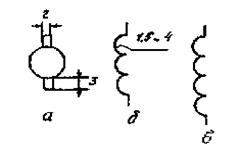 |
Рис. 4.22
4.4.3. ЭДС, индуктируемая в обмотке якоря.
Обмотка якоря состоит из множества «рамок» и имеет в общем случае N активных проводников, соединенных в 2а параллельных ветвей. Существуют различные схемы обмоток якорей машин постоянного тока, которые будут рассмотрены в курсе «Электрические машины».
ЭДС всех проводников, включенных последовательно в одну параллельную ветвь обмотки якоря при одинаковом числе их в каждой, будет являться ЭДС обмотки якоря. С учетом (4.30)
 (4.32)
(4.32)
Среднее значение индукции под полюсом, Тл,
 (4.33)
(4.33)
 (4.34)
(4.34)
где Ф- магнитный поток, Вб;
S —площадь поверхности якоря, приходящаяся на один
полюс, м2;
Dя-— диаметр якоря, м;
lя — длина якоря, м;
2p- количество полюсов.
Окружная скорость на поверхности якоря, м/с,
 (4.35)
(4.35)
где n —частота вращения якоря (число оборотов в старой терминологии), об/мин (мин-1).
Подставляя значение В, S и v по (4.33), (4.34) и (4.35) -в (4.32), получим величину Е, В:
 (4.36)
(4.36)
 (4.37)
(4.37)
 |
Здесь Сn — постоянная для данного двигателя величина, определяемая его конструкцией: числом пар полюсов р,числом пар параллельных ветвей обмотки якоря а и числом проводников в ней N.
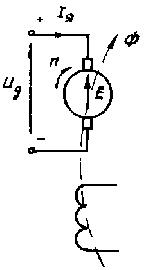
Рис.4.23
4.4.4. Частота вращения якоря
Напряжение, подведённое к якорю при его вращении, уравновешивается противоЭДС и потерей напряжения, в обмотках (рис. 4.23):
 , (4.38)
, (4.38)
где rд — сопротивление обмоток двигателя, подключенных к источнику энергии.
Принимая во внимание выражение для противоЭДС (4.36), после небольших преобразований получим, мин,
 (4.39)
(4.39)
где Cn – по (4.37).
Таким образом, частота вращения якоря двигателя прямо пропорциональна подведенному напряжению и обратно пропорциональна магнитному потоку. Потеря напряжения в активных сопротивлениях невелика и составляет 3—5% от приложенного напряжения.
4.4.5. Вращающий момент двигателя.
На каждый проводник обмотки якоря в магнитном поле действует сила Fnpt значение которой определяют по формуле (4.29). При соединении «рамок» в 2а параллельных ветвей по каждому проводнику протекает ток.


 , (4.40).
, (4.40).
Вращающий момент, создаваемый одной «рамкой» (рис. 4.19),
МР = FПРDЯ (4.41) 
или, с учетом (4.29),
МР = ВIПРlЯD (4.42)
Вращающий момент, создаваемый обмоткой якоря (всеми «рамками»),
 (4.43)
(4.43)
Подставляя в (4.43) значение В по (4.43) с учетом (4.34) и IПР по (4.40), после преобразований получим, Нм,
 (4.44)
(4.44)
 (4.45)
(4.45)
Здесь См — постоянная для данного двигателя величина, определяемая его конструкцией.
Вращающий момент, определяемый по формуле (4.44), называют электромагнитным, подчеркивая этим, что он образовался в результате электромагнитного взаимодействия, тока в обмотке якоря и магнитного поля. Его величина пропорциональна току и магнитному потоку и, что особенно важно подчеркнуть, не зависит от напряжения.
Между постоянными Сп и См существует определенное соотношение. Поделив (4.37) на (4.45) и произведя сокращения, получим
 (4.46)
(4.46)
Вращающий момент, приведенный к валу двигателя (на валу двигателя), будет меньше электромагнитного за счет потерь, то есть
 , (4.47)
, (4.47)
где ΔM — потери вращающего момента в двигателе.
Физическая природа этих потерь — трение вращающихся частей двигателя о воздух, трение в подшипниках и потери на гистерезис и вихревые токи при перемагничивании сердечника якоря в магнитном поле главных полюсов.
Значение М можно представить в другом виде:
 (4.48)
(4.48)
где  - коэффициент потерь вращающего момента.
- коэффициент потерь вращающего момента.
Величина ηм достаточно велика и составляет 0,96—0,98.
Выражения (4.39) и (4.44) являются основными, определяющими процесс преобразования электрической энергии в механическую в двигателе постоянного тока, то есть основными законами электромеханики.
4.4.6. Мощность двигателя и его КПД
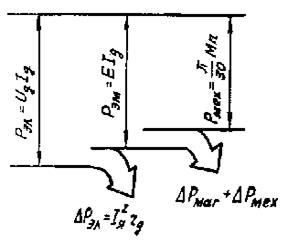
Электрическая мощность, потребляемая двигателем (рис. 4.24),
 (4.49)
(4.49)
Подставив в (4.49) значение UД по (4.38), получим
 (4.50)
(4.50)
Слагаемое  представляет собой электрические потери в обмотках двигателя. К якорю подводится электромагнитная мощность Рэм (см. рис. 4.24). С учетом (4.36)
представляет собой электрические потери в обмотках двигателя. К якорю подводится электромагнитная мощность Рэм (см. рис. 4.24). С учетом (4.36)
 (4.51)|
(4.51)|
Из выражения для вращающего, момента МЭМ (4.44)
 |
 (4.52)
(4.52)
Рис.4.24
Подставив в (4.51) значение произведения по (4.52)
соотношение постоянных  по (4.46), получим выражение для электромагнитной мощности:
по (4.46), получим выражение для электромагнитной мощности:
 (4.53)
(4.53)
Механическая мощность на валу двигателя (см.рис.4.24) меньше, чем  ,на величину потерь
,на величину потерь
 (4.54)
(4.54)
 (4.55)
(4.55)
КПД двигателя (на валу) является отношением полезной механической мощности к затраченной электрической:
 (4.56)
(4.56)
4.4.7. Номинальные технические данные двигателя
Двигатель рассчитывают для работы при значении напряжения, которое считают номинальным,  (nomina —лат.- имя).
(nomina —лат.- имя).
В процессе работы в зависимости от механический нагрузки на валу двигателя при он будет развивать различную мощность. Одно из возможных значений мощности устанавливают в качестве номинального РН,оно ограничивается допустимым нагревом обмоток двигателя из-за возникающих в них потерь. Это значение мощности указывают в техническом паспорте машины.
Частота вращения, вращающий момент на валу и КПД, относящиеся к номинальному режиму работы, также называют номинальными: nН, МН и ηН.
Дата добавления: 2015-09-18; просмотров: 2377;