Колесно-моторный блок
4.5.1. Основные элементы конструкции колесно-моторного блока
Электрический двигатель, предназначенный для привода колесной пары электровоза (или электропоезда), называют тяговым электродвигателем (ТД). Колесная пара, ТД и зубчатая передача, соединяющая их, образуют колесно-моторный блок (КМБ).
На грузовых электровозах используют так называемую опорно-осевую подвеску (установку) ТД (рис. 4.25). Остов ТД 1 опирается на ось 2 колесной пары с помощью двух моторно-осевых подшипников скольжения 3, с другой стороны он опирается на поперечный, брус рамы тележки 4 через упругий элемент 5 (пружины). Таким образом, ТД имеет три. точки опоры: две — на колесной паре Л и В и одну С (упругую) — на раме тележки.
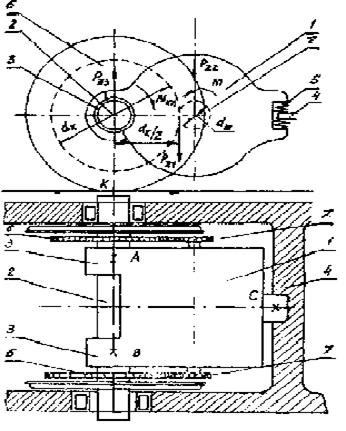 |
Передача вращающего момента, развиваемого ТД, на колесную пару осуществляется с помощью зубчатой передачи, которую называют тяговой. Она может быть двухсторонней (на электровозах) или односторонней (на электропоездах). Большое зубчатое колесо 6 напрессовано на ступицу колесного центра, то есть жестко укреплено на оси колесной пары, а малое зубчатое колесо (шестерня) 7 напрессовано на, конусный конец вала ТД.
Рис.4.25
4.5.2. Сила тяги.
Допустим, что ТД развивает на валу вращающий момент М в направлении, указанном на рис. 4.25 стрелкой. Представим его в виде пары сил  и
и  причем
причем  , то есть
, то есть
 (4.57)
(4.57)
где dШ — диаметр шестерни,
.Сила действует на зуб большого зубчатого колеса и по отношению к колесной паре является внешней силой. Она уравновешивается силой  , приложенной, к оси колесной пары, образуется вращающий момент, действующий на. колесную пару:
, приложенной, к оси колесной пары, образуется вращающий момент, действующий на. колесную пару:
 (4.58)
(4.58)
где dK-диаметр большого зубчатого колеса.
Из (4.57) сила
 (4.59)
(4.59)
Подставив в (4.59) выражение (4.57), получим
 (4.60)
(4.60)
Отношение диаметров зубчатого колеса и шестерни называют передаточным числом тяговой передачи:
 (4.61)
(4.61)
Тогда
 (4.62)
(4.62)
Из предыдущего известно, что значение касательной силы тяги, развиваемой колесной парой, определяется вращающим моментом, приложенным к ней (4.20):
 (4.63)
(4.63)
Принимая во внимание выражение для М (4.48), получим
 (4.64)
(4.64)
 (4.65)
(4.65)
где СF — постоянная КМБ, определяемая как конструктивными параметрами ТД (См), так и КМБ.
При передаче вращающего момента от ТД к колесной паре через тяговую передачу возникают потери (на трение), в результате чего касательная сила тяги, развиваемая двигателем на ободе колеса, будет меньше, чем по уравнению (4.64), на величину этих потерь:
 (4.66)
(4.66)
или
 (4.67)
(4.67)
где ηз.п- КПД зубчатой передачи.
Значение силы тяги на ободе колеса:
 (4.68)
(4.68)
Таким образом, сила тяги, развиваемая колесной парой, прямо пропорциональна току и магнитному потоку ТД. Следует обратить особое внимание на полную аналогию выражений для вращающего момента ТД (4.48) и силы тяги (4.68).
4.5.3. Скорость поступательного движения
Скорость на окружности колеса электровоза, м/с,
 (4.69)
(4.69)
где nк.п- частота вращения колесной пары, мин-1 (об/мин).
Частота вращения колёсной пары:
 (4.70)
(4.70)
Скорость движения транспортных средств принято измерять и рассчитывать в км/ч.
Тогда
 (4.71)
(4.71)
или
 ; (4.72)
; (4.72)
 , (4.73)
, (4.73)
где Cv — постоянная КМБ, определяемая конструктивными параметрами ТД и КМБ.
Таким образом, скорость движения ЭПС прямо пропорциональна напряжению, подведенному к двигателю, и обратно пропорциональна магнитному потоку.
Необходимо обратить внимание на полную аналогию выражений для частоты вращения якоря ТД (4.39) и для скорости движения ЭПС (4.72).
Между постоянными CF и СV существуют определенные соотношения. Поделив CF по (4.65) на Cv по (4.73), получим 3,6, то есть
 . (4.74)
. (4.74)
В результате проделанных выводов получены важнейшие соотношения между параметрами электрической энергии, потребляемой ТД, и параметрами, характеризующими поступательное движение ЭПС — основные законы преобразования электрической энергии в механическую, затрачиваемую на движение поезда, .
4.6. Электромеханические характеристики тягового электродвигателя
4.6.1. Общие сведения
Электромеханическими характеристиками на валу ТД называют зависимости вращающего момента и частоты вращения от тока, потребляемого ТД, то есть зависимости М(Iя) и n(Iя), определяемые формулами (4.48) и- (4.39). К ним же относят зависимость КПД от тока — η(IЯ). При постоянном напряжении, подведенном к двигателю, характер этих, зависимостей определяется двумя величинами: током Iя и магнитным потоком Ф ТД.
4.6.2. Способы включения обмотки возбуждения
Создание магнитного потока осуществляется катушками, расположенными на сердечниках главных полюсов двигателя, по которым протекает ток, — обмоткой возбуждения.
Существуют различные способы включения обмотки возбуждения по отношению к обмотке якоря. Для тяговых двигателей ЭПС. используют, как правило, последовательное их соединение (рис. 4.26,а). Двигатель в этом случае называют двигателем с последовательным возбуждением. Ток в обмотке возбуждения Iв равен току в обмотке якоря Iя:
IB= IЯ.
 |
Рис. 4.26
Возможно питание обмотки возбуждения от источника энергии., не связанного с обмоткой якоря, — двигатель с независимым возбуждением (рис. 4.26,6). Применение таких двигателей в качестве тяговых имеет ряд преимуществ, однако пока широкого распространения ТД с независимым возбуждением не получили по ряду причин, подробное рассмотрение которых будет сделано в специальных дисциплинах.
4.6.3. Магнитная характеристика
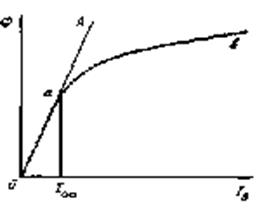 |
Магнитной характеристикой ТД называют зависимость магнитного потока от тока возбуждения, то есть от тока, протекающего по катушкам главных полюсов.
Рис. 4.27
Эта зависимость (рис. 4.27) имеет нелинейный характер, что связано с особенностями ферромагнитных материалов, из которых выполнена магнитная •цепь двигателя. При небольших значениях тока и магнитного потока существует прямая пропорциональность между этими величинами:  (участок 0 — а кривой на рис. 4.27). Когда магнитный поток достигает определенной величины, дальнейший его рост замедляется (участок ab кривой Ф(lв)) —происходит так называемое насыщение магнитной цепи машины.
(участок 0 — а кривой на рис. 4.27). Когда магнитный поток достигает определенной величины, дальнейший его рост замедляется (участок ab кривой Ф(lв)) —происходит так называемое насыщение магнитной цепи машины.
4.6.4. Электромеханические характеристики на валу ТД
При последовательном возбужденииТД (см. рис. 4.26, а) Iв = Iя = Iд. Если пренебречь величиной потери напряжения в обмотках ТД, выражение (4.39) можно приближенно записать в виде:
 (4.75)
(4.75)
Если магнитный поток прямо пропорционален току (  участок 0—а магнитной характеристики), то
участок 0—а магнитной характеристики), то
 (4.76)
(4.76)
то есть в координатах п—Iя такая зависимость является гиперболой (штриховая кривая 1 на рис. 4.28). Так как при насыщении магнитной цепи Iв>Iва темп роста магнитного потока снижается, то и частота вращения будет больше .значений, определяемых кривой 1 (штрихпунктирная кривая 2 на рис. 4.28). Если учесть потерю напряжения, то в соответствии с формулой (4.39) действительная частота вращения будет меньше, чем по приближенной формуле(4.75) (сплошная кривая 3 на рис. 4.28). Чем больше ток, тем больше будет расхождение между кривыми 2 и 3. Таким образом, действительная зависимость n(Iя) имеет гиперболический характер, но «чистой» гиперболой не является.
Вращающий момент (без учета потерь ΔМ) определяется формулой (4.44). На прямолинейной части магнитной характеристики (при Iв<Iва) вращающий момент пропорционален квадрату тока:
 (4.77)
(4.77)
а зависимость Мэм(IД) является параболой (штриховая кривая 1 на рис. 4.29). При насыщении магнитной цепи значения магнитного потока меньше тех, которые определяются прямой ОА на рис. 4.27, .а следовательно, меньше и значения момента Мэм (штрихпунктирная кривая 2 на рис, 4.29).
Зависимость вращающего момента на валу ТД M(L) расположена ниже зависимости Мэм(IД) из-за потерь, возникающих в двигателе (сплошная кривая 3 на рис. 4.29).
Таким образом, действительная зависимость М(IД) имеет, параболический характер, но «чистой» параболой не является.
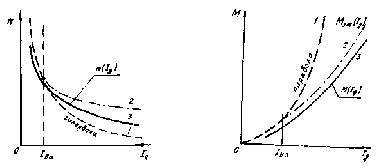 |
Рис. 4.28 Рис. 4.29
 |
Электромеханические характеристики можно рассчитать по точкам, имея магнитную характеристику. Задаваясь значением тока, по магнитной характеристике находят соответствующее значение магнитного потока и по формулам (4.39) и (4,44) рассчитывают значения частоты вращения и вращающего момента. Повторяя эти расчеты для ряда значений тока, получают соответствующее количество значений частоты вращения и вращающего момента. После нанесения точек на график в координатах п—IД и М—Iд следует соединить их плавной линией и получить искомые характеристики.
Рис. 4.30 Рис. 4.31
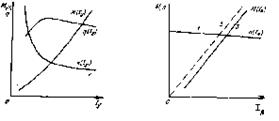
Электромеханические характеристики на валу ТД обычно совмещают на одном планшете, здесь же изображают зависимость КПД от тока (рис. 4.30). Рассматриваемые характеристики являются естественными, автоматическими. Каждому значению тока однозначно соответствуют значения п и М. Если механическая нагрузка на валу двигателя возросла, то частота вращения снизится, уменьшится значение противоЭДС, возрастет ток, увеличится вращающий момент до величины, соответствующей новому значению механической нагрузки. ПротивоЭДС играет роль автоматического регулятора режима работы ТД.
При независимом возбуждении ТДток возбуждения при постоянном значении напряжения UB от независимого источника питания остается постоянный и не зависит от тока якоря, следовательно магнитный поток также не изменяется: Ф= const (см. рис. 4.26, б).
Из формулы (4.39) следует, что зависимость п(1) является прямой линией (линия 1 на рис. 4.31): при увеличении тока происходит некоторое уменьшение частоты вращения за счет роста потери напряжения Iяrд. Зависимость МЭМ(I) по (4-44) является прямой линией, проходящей через начало координат (штриховая прямая 2 на рис. 4.31), а М(I) расположена ниже за счет потерь ΔМ: (прямая 3 на рис. 4.31).
4.7.3. Ограничения тяговой характеристики
 |
При рассмотрении процесса образования силы тяги электровоза установлено, что максимально возможная сила тяги ограничивается условиями сцепления колес с рельсами и определяется формулой (4.28). Коэффициент сцепления зависит от скорости движения — снижается при ее увеличении (см. рис. 4.17). Следовательно, максимальная сила тяги, или, как принято говорить, сила тяги по сцеплению при определенной массе локомотива зависит от скорости. Эта зависимость изображена на рис. 4.34 линией 2.
Рис. 4.34
Каждый локомотив рассчитывается на движение с определенной максимально допустимой скоростью, которую называют конструкционной. Ее значение определяется прочностью вращающихся деталей, испытывающих действие центробежных сил (якоря ТД, зубчатые колеса тяговой передачи, бандажи колесных пар), а также устойчивостью движения экипажа по рельсовому пути. Это ограничение нанесено вертикальной линией 3 на рис. 4.34. Таким образом, «рабочая часть» тяговой характеристики ограничивается точками А и B. Части характеристики, лежащие за пределами указанных точек, использовать невозможно: при FK>FK.СЦ.. произойдет боксование колесных пар, а при  может .нарушиться механическая прочность деталей КМБ.
может .нарушиться механическая прочность деталей КМБ.
4.7.4. Сила тяги и скорость движения
В соответствии с первым законом механики Ньютона тело находится в состоянии покоя или равномерного прямолинейного движения (движения с постоянной скоростью), если сумма сил, действующих на него, равна нулю.
Применительно к составу, ведомому электровозом, развивающим силу тяги FK и испытывающим сопротивление движению W, этот закон может быть записан так:

 (4.78)
(4.78)
то есть FK=W. (4.79)
Сопротивление движению является функцией скорости W(v) и растет с ее увеличением (см. рис. 4.6).
Если на графике тяговой характеристики (кривая 1 на Рис. 4.34) нанести зависимость W(v) (кривая 4 на рис. 4.34), то в точке их пересечения М выполняется условие (4.79), а это означает, что данный состав с электровозом определенного типа на конкретном участке пути будет двигаться с равномерной скоростью vм, а электровоз будет развивать силу тяги FК.М.
Дата добавления: 2015-09-18; просмотров: 3474;