Регулирование частоты вращения асинхронных двигателей.
Асинхронный двигатель наиболее просты в изготовлении и наиболее дешёвые, поэтому применение их в регулируемых электроприводах весьма перспективно. Известны десятки способов регулирования частоты вращения асинхронного двигателя, однако до сих пор не найдено дешёвой и экономичной системы регулирования. Из формулы  следует, что скорость ротора (
следует, что скорость ротора (  ) можно регулировать тремя способами: путём изменения частоты сети (
) можно регулировать тремя способами: путём изменения частоты сети (  ), числа пар полюсов машины ( р ) и скольжения (S).
), числа пар полюсов машины ( р ) и скольжения (S).
Регулирование скорости путём переключения числа полюсов ступенчатое. При жёстких механических характеристиках двигателя, когда скольжение изменяется в небольших пределах, регулирование скорости экономичное. Следует иметь в виду, что ступени частоты вращения при частоте 50 Гц и р = 1 и 2 соответственно 3000 или 1500 об/мин, а при р = 5 и 6 – 600 и 500 об/мин. При большем числе полюсов разница между синхронными частотами вращения уменьшается.
Для изменения числа полюсов на статоре в одни и те же пазы можно уложить две отдельные обмотки с разными числами полюсов. В зависимости от необходимой частоты вращения включается одна или другая обмотка. При этом поочерёдно работают одна или другая обмотка, что снижает использование материалов. Поэтому желательно иметь одну обмотку и путём изменения схемы обмотки переключать число полюсов.
В малых машинах применяют независимые обмотки для разных чисел полюсов, в больших пользуются одной и той же обмоткой с переключением числа полюсов. Для этого можно применить любую обмотку переменного тока, сделав в ней ряд дополнительных выводов и соединений между отдельными катушками и фазами.
Роторные обмотки двигателей с переключением числа полюсов. Обычно применяют коротко – замкнутые обмотки в виде беличьего колеса, т.к. они пригодны для любого числа полюсов. С электрической точки зрения беличьё колесо представляет собой многофазную обмотку, соединенную в звезду и замкнутую накоротко. При этом обмотки всех пар полюсов соединены параллельно. В беличьем колесе число фаз m2=z2/p, где z2 – число стержней на роторе, р – число пар полюсов.
Ротор с фазными обмотками должна переключаться на разное число полюсов. Переключение числа полюсов осуществляется аналогично переключению обмотки статора.
Двигатели с изменением числа полюсов называют многоскоростными.
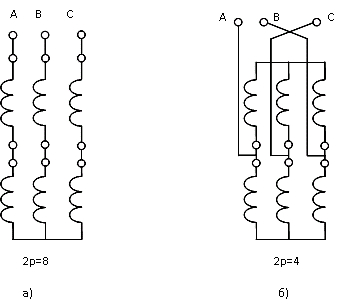
Возможно переключение числа пар полюсов путём изменения схемы обмотки иллюстрирует рис. 3.22: При соединении обмоток по а) получают четыре полюса, а по б) – два.
| Рисунок 3.22 Переключение числа пар полюсов: а) р=2; б) р=1 |
| а) |
| τ |
| N |
| S |
| N |
| N |
| S |
| б) |
| τ |
| N |
| S |
При переключении числа полюсов полюсное деление изменяется в 2 раза, при это изменяется и электрический угол фазной зоны с 60 на 120˚. Чтобы направление вращения поля при переключении числа полюсов оставалось неизменным, необходимо изменить порядок следования фаз путём переключения обмоток. На рис. 3.23 а) приведена схема включения обмоток по схеме звезда, а на рис. 3.23 б) показано переключение обмоток статора на схему двойная звезда:
| Рисунок 3.23 Схема включения обмоток статора асинхронной машины по схеме звезда а) и по схеме двойная звезда б) |
При таком переключении частота вращения изменяется в 2 раза, а
момент остаётся тем же.
На рис. 3.24 приведено переключение обмоток с на , которое приводит к увеличению скорости в 2 раза, момент асинхронного двигателя снижается в 2 раза, а мощность постоянна
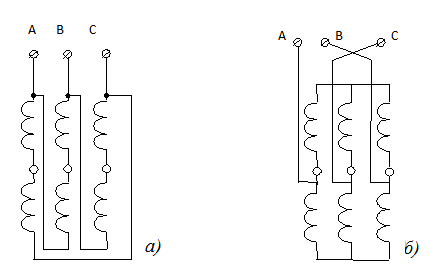
Рисунок 3.24 Переключение обмоток
асинхронного двигателя с а) на б)
При проектировании многоскоростных двигателей стремятся сохранить высокие энергетические показатели на всех синхронных частотах вращения. Поэтому многоскоростные машины получаются с большим расходом активных материалов на единицу мощности по сравнению с обычными асинхронными двигателя.
Несмотря на то, что многоскоростные двигатели требуют сложной коммутационной аппаратуры и имеют несколько худшие энергетические показатели, они достаточно широко применяются в промышленности для привода станков, лифтов, вентиляторов и насосов, т.е. там где допустимо ступенчатое регулирование частоты вращения.
В серии 4А предусмотрен выпуск многоскоростных асинхронных двигателей на базе односкоростных с использованием сердечника статора и ротора базовых машин на мощности 0,12 – 50 кВт на две, три и четыре синхронных частоты вращения.
Наиболее простым способом, обеспечивающим плавное регулирование частоты вращения асинхронного двигателя, является изменение скольжения. Принципиальным недостатком этого способа регулирования частоты вращения является низкий кпд, т.к. потери в роторе пропорциональны скольжению. И какие бы не предлагались варианты схем изменения скольжения, а их существует десятки, в электромеханическом преобразователе энергии преобразование в тепло и в механическую мощность имеет равные возможности. В асинхронном двигателе эта связь проявляется особенно наглядно т.к. Рэ2=Рэм  S. Эта связь не зависит от способа изменения скольжения, когда в процессе регулирования участвует одна машина.
S. Эта связь не зависит от способа изменения скольжения, когда в процессе регулирования участвует одна машина.
Наиболее распространённые способы изменения скольжения в асинхронном двигателе – это изменение напряжения, введение сопротивления в цепь ротора, искажение симметрии подводимых напряжений и введение ЭДС в цепь ротора.
При изменении напряжения источника питания  изменяется максимальный момент пропорционально квадрату напряжения, а критическое скольжение остаётся неизменным (Рис. 3.25). При уменьшении U1 изменяется точка устойчивой работы системы двигатель – нагрузка и изменяется скольжение от S1 до S3. Пределы регулирования зависят от вида механической характеристики двигателя и нагрузки. Чтобы расширить пределы регулирования – отношение максимальной частоты вращения к минимальной (nmax : nmin) необходимо иметь мягкую механическую характеристику двигателя, когда критическое скольжение находится в пределах 1 ÷ 3.
изменяется максимальный момент пропорционально квадрату напряжения, а критическое скольжение остаётся неизменным (Рис. 3.25). При уменьшении U1 изменяется точка устойчивой работы системы двигатель – нагрузка и изменяется скольжение от S1 до S3. Пределы регулирования зависят от вида механической характеристики двигателя и нагрузки. Чтобы расширить пределы регулирования – отношение максимальной частоты вращения к минимальной (nmax : nmin) необходимо иметь мягкую механическую характеристику двигателя, когда критическое скольжение находится в пределах 1 ÷ 3.
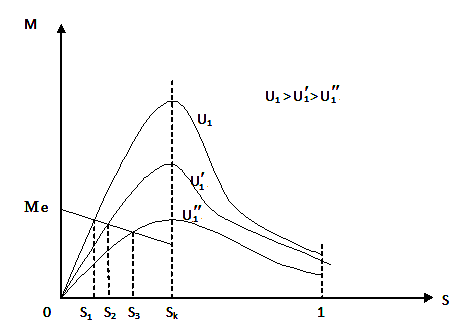
Рисунок 3.25 Механические характеристики асинхронного двигателя при изменении напряжения источника тока и нагрузки Ме
Изменять частоту вращения а.д. можно, вводя активное сопротивление в цепь ротора (Рис. 3.26).
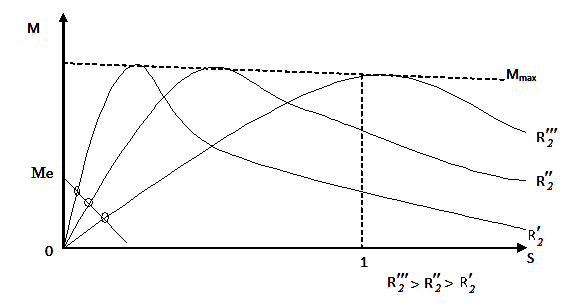
Рисунок 3.26 Механическая характеристика асинхронного двигателя при изменении сопротивления в цепи ротора и нагрузки Ме
В двигателе с фазным ротором регулировочный реостат подключается к контактным кольцам, и при изменении активного сопротивления резистора двигатель плавно или ступенчато, в зависимости от конструкции трёхфазного резистора, переходит с одной механической характеристики на другую.
Преимущество регулирования частоты вращения путём изменения активного сопротивления ротора в том, что максимальный момент остаётся неизменным, т.к. не изменяется напряжение, подводимые к двигателю. Включение резистора в обмотку ротора приводит к тому, что частично потери в роторе выделяются и в резисторе, пропорционально отношению активных сопротивлений обмотки ротора и резистора. Выведение потерь из машины даёт возможность уменьшить габариты машины.
При регулировании частоты вращения асинхронных исполнительных двигателей находит применение комбинированный способ регулирования, когда изменяют подводимое к двигателю напряжение и активное сопротивление ротора.
При изменении частоты вращения ротора, изменяется частота тока в роторе f2=Sf1. За счёт изменения f2, при этом за счёт вытеснения тока в роторе можно получить необходимый закон изменения R2. При увеличении f2 растёт активное сопротивление короткого замыкания обмотки, выполненной в виде диска, и частота вращения изменяется за счёт изменения напряжения и активного сопротивления обмотки ротора.
Регулирование напряжения на выводах двигателя осуществляется путём включения реакторов насыщения, магнитных усилителей, автотрансформаторов и тиристорных преобразователей напряжения. Последние в настоящее время получили наибольшее распространение.
Тиристорные преобразователи напряжения включают последовательно в обмотку статора двигателя (Рис. 3.27).
Через преобразователь проходит вся мощность двигателя, и габариты преобразователя несмотря на применение тиристоров в 1,5 – 2 раза больше двигателя.
Магнитные усилители в качестве регуляторов применяют реже, т.к. они имеют достаточно большие габариты.
Мощность скольжения  S может быть использована или частично возвращена в сеть, если использовать дополнительно другие машины или статические преобразователи энергии.
S может быть использована или частично возвращена в сеть, если использовать дополнительно другие машины или статические преобразователи энергии.
| А |
| В |
| С |
| Рисунок 3.27 Тиристорный преобразователь напряжения включенный в цепь статора асинхронного двигателя |
Такие схемы регулирования называются каскадными (Рис. 3.28).
| Рисунок 3.28 Каскадная схема регулирования скорости асинхронного двигателя |
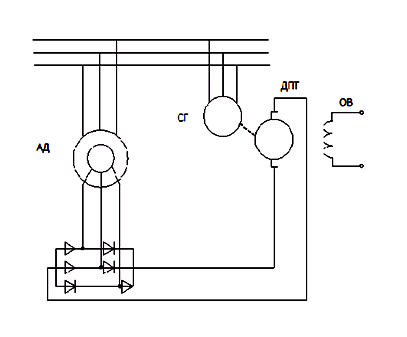
Схема (Рис. 3.28) работает следующим образом. Мощность скольжения асинхронного двигателя после выпрямления подаётся на двигатель постоянного тока (ДПТ) на валу которого находится синхронный генератор (СГ). Синхронный генератор отдаёт энергию в сеть. Недостаток наличие машины постоянного тока и силовых выпрямителей. Габариты двигателя и выпрямителей зависят от пределов регулирования.
Есть много других схем регулирования путём изменения скольжения.
Наиболее перспективный способ регулирования частоты вращения асинхронного двигателя является частотный. (Рис.3.29) изменение частоты и напряжения источника питания осуществляется преобразователем частоты (ПЧ).
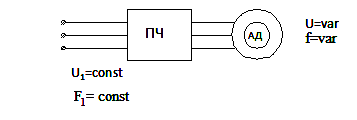
| Рисунок 3.29 Регулирование скорости асинхронного двигателя ПЧ. |
При преобразовании частоты f1 и напряжение сети ПЧ обеспечивает работу АД при постоянном потоке, U/f = const. Регулирование экономичное, однако через преобразователь проходит вся мощность, и габариты преобразователя частоты превышают габариты двигателя.
Регулировать частоту можно в статоре или в роторе. В двигателях большой мощности удобнее регулировать частоту в роторе, т.к. мощность скольжения  *S значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронный двигатель двойного питания, а способ называют введением ЭДС в цепь ротора. Этот способ занимает среднее положение между частотным способом и способом изменения скольжения.
*S значительно меньше мощности обмотки статора. Поэтому преобразователь частоты имеет меньшие габариты. В этом случае мощность в воздушный зазор поступает со стороны статора и ротора. Такие машины получили название асинхронный двигатель двойного питания, а способ называют введением ЭДС в цепь ротора. Этот способ занимает среднее положение между частотным способом и способом изменения скольжения.
Несмотря на применение тиристоров частотный привод всё ещё не занял доминирующего положения в регулируемых приводах с асинхронным двигателем. В последнее время в связи с появлением силовых транзисторов при параллельном их соединении появилась возможность создать дешёвый малогабаритный преобразователь частоты на мощность в несколько десятков кВт. Следует иметь в виду, что введение в энергосистему нелинейных элементов(преобразователь частоты) приводит к появлению высших гармоник в сети и искажению синусоидальности напряжений. Ухудшение качества электроэнергии приводит к потерям в энергосистеме.
Дата добавления: 2015-09-18; просмотров: 2946;