Асинхронные машины автоматических устройств.
Двигатели с большим критическим скольжением, работающие в системах автоматического управления, называются исполнительными.
Эти двигатели должны иметь: большой диапазон изменения чистоты вращения при линейных механических и регулировочных характеристиках; высокое быстродействие; большой пусковой момент; малую мощность управления; малый момент инерции, а также не иметь самохода при уменьшении напряжении управления до нуля.
Этим противоречивым требованиям в основном удовлетворяют двухфазные асинхронные двигатели с полым ротором и асинхронные двигатели с массивным ротором. В асинхронных двигателях с полным ротором, ротор выполняется в виде тонкостенного стакана из алюминия. Ротор имеет небольшой момент инерции. Малый момент инерции, большое критическое скольжения обеспечивает большое быстродействие и линейность механической характеристики в широком диапазоне изменения частоты вращения. Двигатели с полным ротором широко используются в системах автоматического управления и выпускаются промышленностью до 30 Вт по мощности. Недостатком этих двигателей является большой воздушный зазор включающего в себя два воздушных зазора от статора к ротору, от ротора к неподвижному магнитопроводу и, включая к этому, толщину немагнитного ротора. Большой воздушный зазор снижает Cos  , а это приводит к снижению КПД двигателя.
, а это приводит к снижению КПД двигателя.
Основной проблемой при создания исполнительных двигателей на мощности в сотни ватт и выше является отвод тепла. Например, при использовании двигателя, как моментного, работающего длительно при S  , практически вся мощность преобразовано в тепло. Для отвода тепла приходиться увеличивать габариты, чтобы снизить электромагнитные нагрузки и увеличить поверхность охлаждения. Применяются также вентиляторы - наездники, встраиваемые в двигатель, системы водяного и испарительного охлаждения. В исполнительном двигателе с вентилятором – наездником вентилятор вращается специальным асинхронным двигателем, частота вращения которого не зависит от частоты вращения исполнительного двигателя.
, практически вся мощность преобразовано в тепло. Для отвода тепла приходиться увеличивать габариты, чтобы снизить электромагнитные нагрузки и увеличить поверхность охлаждения. Применяются также вентиляторы - наездники, встраиваемые в двигатель, системы водяного и испарительного охлаждения. В исполнительном двигателе с вентилятором – наездником вентилятор вращается специальным асинхронным двигателем, частота вращения которого не зависит от частоты вращения исполнительного двигателя.
Для плавного регулирования частоты вращения асинхронного исполнительного двигателя применяют два способа: частотный (изменением частоты и напряжения) и изменением напряжения (амплитуды и фазы) (Рис. 3.36). Наибольшее распространение получил второй способ, т. к. преобразователь частоты, несмотря на применение силовых полупроводниковых элементов, остаются громоздкими и дорогими.
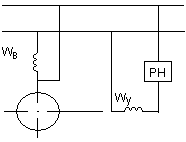
Рисунок 3.36 Схема управления двухфазным двигателем Изменением напряжения и фазы. РН - регулятор напряжения.
В настоящее время для управления применяются микропроцессоры.
В генераторном режиме асинхронная исполнительная машина используется в качестве тахогенераторов – датчиков частоты вращения и датчиков ускорения. Это асинхронная машина с полным ротором (Рис. 3.37), к одной обмотки статора (обмотке возбуждения) проводится переменное напряжения, а со второй обмотки статора со сдвигом на 90˚ снимается напряжение пропорциональное частоте вращения.
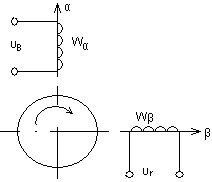
Рисунок 3.37 Асинхронный тахогенератор
В системах синхронной связи и для преобразования угла поворота в электрической сигнал применяются сельсины и поворотные трансформаторы.
В однофазных сельсинах имеются однофазная обмотка возбуждения и трехфазная обмотка синхронизации (Рис. 3.38).
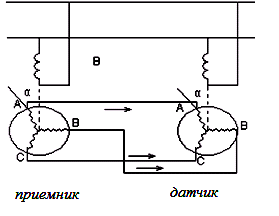
Рисунок 3.38 Электрическая схема сельсина
Поворотный трансформатор конструктивно представляет собой двухфазный двигатель с двухфазной обмоткой ротора, выведенной на контактные кольца (Рис. 3.39).
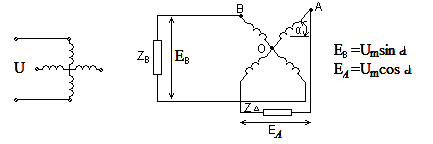
Рисунок 3.39 Синус - косинус поверхностный трансформатор.
Схема включения.
Если в поворотном трансформаторе используется одна обмотка на роторе, такой поворотный трансформатор называется синусным поворотным трансформатором
Так как сельсины и поворотные трансформаторы выполняю функции датчиков и приемников, при их проектировании основное влияние уделяется точности и надежности.
Сельсины применяются в системах синхронной связи двух видов: синхронного поворота и синхронного вращения. Системы синхронного вращения заменяют механическое соединение двух или нескольких синхронно-перемещающихся механизмов. Электрический вал применяется там, где необходимо иметь синхронное вращение механизмов, находящихся на большом удалении друг от друга, а механическое соединение нежелательно или невозможно. Электрический вал состоит из асинхронной машины с фазным ротором, контактные кольца которых соединены между собой (Рис.3.40). При рассогласовании роторов двигателей, так же, как и в схеме с сельсинами, возникает в статоре двигателе уравнительные токи и электромагнитные моменты, возвращающие роторы в согласованное положение.
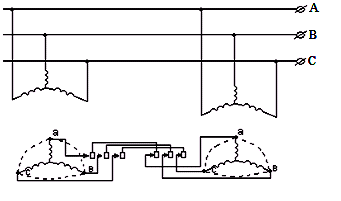
Рисунок 3.40 Электрический вал на основе асинхронных машин с фазным ротором
Дата добавления: 2015-09-18; просмотров: 2159;