Розділ 1. Електроприводи підрулюючих пристроїв 2 страница
Основні параметри систем кренування
До основних параметрів систем кренування і диферента відносяться:
1. місткість кренових цистерн;
2. подача насосів.
Місткість кренових цистерн ( м  )
)
V  =
=  , ( 5 )
, ( 5 )
де γ – питома вага баласту;
с – відстань між центром тяжкості об'єму кренових цистерн і діаметральною площиною;
М- момент, що кренить судно на один градус;
Θ – допустимий кут крену при динамічному додатку навантаження (Θ ≈ 13º ).
Подача насоса ( м/ хв )
Q =  , ( 6 )
, ( 6 )
де V  місткість кренових цистерн одного борту, м ;
місткість кренових цистерн одного борту, м ;
t час перекачування баласту з цистерни одного борту в цистерни іншого борту, хв.
§ 2.2. Схема управління електроприводом насоса кренової системи
Потужність електродвигунів насосів кренової системи складає сотні кВт. Тому для електроприводи насосів застосовують систему генератор-двигун ( Г – Д ) ( рис. 7 ).
Ця система забезпечує плавне і в широких межах регулювання швидкості насоса.
Система передбачає три види управління: ручне, дистанційне і автоматичне.
Силова частина схеми
У силову частину схеми входять такі елементи ( рис.7 ):
1. генератор G1, що має незалежну L2G1 ( НОВГ ) і
протикомпаунд послідовну L1G1 ( ПОВГ ) обмотки збудження;
2. збудник G2, що має незалежну обмотку збудження L1G2 ;
2. електродвигун насоса М1 з незалежною обмоткою
збудження L1M1 ( НОВД );
3. контактор збудження КМ., для подачі напруги на
незалежну обмотку збудження LL11MM11 двигуна М1 і регулювальний реостат RRP;
4. реле максимального струму НО, для захисту ланцюга
головного струму від струмів короткого замикання;
5. проміжні реле максимального струму К1А і КF; ці
реле використовують через те, що контакти реле НО розраховані на протікання тільки малих струмів.
У ланцюзі НОВД L1M1 включений регулювальний реостат R1, який використовується тільки при настройці схеми.
У ланцюзі НОВГ L1G2 збудника G2 включений регулювальний реостат RР, для зміни струму збудження G2. За допомогою цього реостата змінюється напруга G2, а значить, напруга G1 і швидкість двигуна М1.
Схема управління(рис.7)
До основних елементів схеми відносяться :
1. S1 – вимикач ланцюгів управління ;
2. SQ0 – кінцевий вимикач движка реостата RР, його контакт замкнутий, якщо движок знаходиться в середньому ( результатному ) положенні;
3. S2 – двополюсний вимикач ланцюгів управління, включається тільки при дистанційному і автоматичному керуванні;
4. SQ1 і SQ2 - кінцеві вимикачі движка реостата RР, контакти кожного розмикаються при підході движка до крайніх протилежних положень;
5. М2 – електродвигун переміщення движка реостата RP ( серводвигун );
6. КТ1, КТ2 – реле часу, для виключення помилкових включень насоса при хитавиці;
7. SB1 – кнопка включення насоса для перекачування баласту в цистерну лівого борту;
8. SB2 – те ж, для перекачування баласту в цистерну правого борту;
9. ВР1 – реле тиску води в цистерні лівого борту;
10. ВР2 – те ж, в цистерні правого борту;
11. S3 – перемикач видів управління. Має 3 положення: ручне «0», дистанційне «Дист» і автоматичне «Авт».;
12. SB3 – кнопка, використовувана для перевірки ланцюгів управління.
Підготовка до роботи
Для підготовки схеми до роботи:
1. перевіряють положення движка реостата RP і при
необхідності встановлюють його в початкове ( середнє ) положення; при цьому замикається контакт SQ0;
2. включають 3-полюсний вимикач S1.
При цьому утворюється ланцюг котушки контактора збудження КМ.: «плюс» - лівий контакт SS11 - FFU11 – SS11 – KKF – КМ. – SSQ00 – котушка КМ. – FFU22 – правий контакт SS11 – «мінус».
Контактор КМ. включається, замикає головні контакти, подаючи живлення на НОВД L1M1 і реостаті RP, і перемикає допоміжні.
Один з них розмикається, вводячи послідовно з котушкою L1M1 економічний резистор R2, а інший замикається, шунтуючи контакт SQ0.
Двигун М1 збуджується. Схема готова до роботи.
Ручне управління
Для ручного управління треба перемикач видів управління S3 встановити в положення «0» ( див. мал. 7 ).
При ручному управлінні використовується реостат RP. Його повзунки переміщаються за допомогою движка ( на схемі не показаний ).
У середньому положенні движка повзунки зведені в одну крапку. При цьому напруга на незалежній обмотці збудження збудника L1G2 відсутня, двигун М1 не працює.
При виведенні движка з середнього положення повзунки RP переміщаються в протилежних напрямах, наприклад, верхній вліво, а нижний – управо ( або навпаки ). Чим більше розведені повзунки, тим більше напруга на НОВГ L1G2 і тим більше швидкість двигуна М1.
Якщо змінити напрям руху повзунків ( верхній – управо, нижний – вліво ), зміниться напрям струму в НОВГ L1G2, що приведе до реверсу двигуна М1.
Для зупинки насоса движок RP треба уручну повернути в середнє положення.
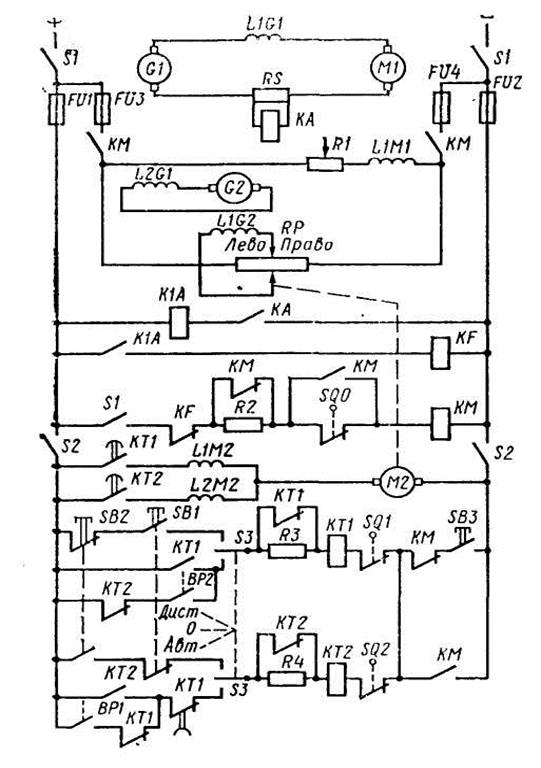
Рис. 7. Схема управління електроприводом насоса кренової системи
Дистанційне керування
Для дистанційного керування треба включити вимикач S2, а перемикач S3 встановити в положення «Дист».
При дистанційному керуванні використовуються кнопки SB1
і SB2.
Для перекачування баласту на лівий борт натискають кнопку
SB1 через контакти якої включається реле часу КТ1 по ланцюгу:
«плюс» - лівий контакт S1 - FU1 – S2 – SB2 – SB1 – КТ1 – котушка КТ1 – SQ1 – КМ. – S2 – FU2 – правий контакт S1 – «мінус».
Реле КТ1 включається і з витримкою часи 2 із замикає контакт КТ1 в ланцюзі обмотки якоря серводвигуна М2. Цей двигун має на головних полюсах дві послідовні обмотки збудження L1M1 і L1M2, що працюють по черзі.
Через контакт КТ1 утворюється ланцюг:
«плюс» - лівий контакт S1 - FU1 – S2 – КТ1 – L1M2 – обмотка якоря М2 - S2 – FU2 – правий контакт S1 – «мінус».
Серводвигун М2 включається і переміщає движок реостата RP.
При цьому включається насос М1, швидкість його у міру переміщення движка зростає.
При досягненні движком крайнього положення контакт SQ1 розмикається, двигун М2 зупиняється.
Насос працює з найбільшою швидкістю і максимальною подачею.
Якщо необхідно встановити меншу швидкість, треба, не чекаючи спрацьовування SQ1 ( у крайньому положенні ), вчасно відпустити кнопку SB1.
Щоб зупинити насос, треба повернути движок реостата в середнє положення шляхом реверсу серводвигуна М2.
Для цього натискають кнопку SB2. При цьому включиться реле КТ2, яке введе в роботу другу послідовну обмотку L2M2, двигун М2 реверсує і стане повертати движок повзунків в середнє положення. У цей момент кнопку SB2 треба відпустити.
Для перекачування баласту на правий борт треба натиснути кнопку SB2. Далі схема працює так само, як при натисненні кнопки SB1.
Автоматичне управління
При автоматичному управлінні система управління забезпечує постійне перекачування баласту з одного борту на іншій і у зворотному напрямі.
Це приводить до розгойдування корпусу судна, унаслідок чого корпус судна звільняється від затиску. Розгойдування корпусу забезпечують датчики тиску води в цистернах лівого і правого бортів ВР1 і ВР2.
Для роботи в режимі автоматичного управління спочатку уручну або дистанційно ( див. опис вищий ) наповнюють одну з цистерн, наприклад, цистерну правого борта, при цьому замикаються контакти датчика тиску води в цій цистерні ВР2.
Потім встановлюють перемикач видів управління S3 в положення «Авт».
Далі схема працює автоматично.
Через контакти ВР2 включається реле часу КТ1 по ланцюгу:
«плюс» - лівий контакт S1 - FU1 – S2 – КТ2 – ВР2 – КТ1 – котушка КТ1 – SQ1 – КМ - S2 – FU2 – правий контакт S1 – мінус».
Реле КТ1 замикає два контакти:
1. перший контакт шунтує контакт ВР2;
2. другий контакт КТ1 в ланцюзі обмотки збудження L1M2 і
обмотки якоря двигуна М2.
Двигун М2 переміщає движок реостата ВР, наприклад, вліво, при цьому відбувається пуск і розгін двигуна насоса М1.
Коли движок дійде до крайнього положення, розмикаєтся контакт кінцевого вимикача SSQ11, реле КТ1 відключається. Воно розмикає контакт КТ1 в ланцюзі обмотки якоря двигуна М2, який зупиняється.
Насос М1 перекачує баласт в цистерну лівого борту з максимальною подачею.
У міру перекачування тиск води в цистерні правого борту зменшується, розмикається контакт ВР2 реле тиску в ланцюзі котушки реле КТ1. Проте його розмикання не впливає на роботу схеми, оскільки реле КТ1 раніше відключилося із-за розмикання контакту SQ1.
При наповненні цистерни лівого борту до необхідного рівня замикається контакт реле тиску ВР1. Реле КТ2 включається і включає серводвигун М2 у зворотному напрямі ( реверс М2 ). Серводвигун зупиниться при розмиканні контакту SQ2.
При переміщенні движка з крайнього лівого положення в середнє, швидкість двигуна М1 поступово зменшується, при середньому положенні движка двигун М1 зупиняється.
При переміщенні движка з середнього в крайнє праве положення двигун М1 реверсує і розгониться у зворотному напрямі. Починається перекачування баласту з лівого борту на правий, до моменту замикання контактів ВР2.
Далі робота схеми повторюється.
Налагоджувальні роботи
Перед початком налагоджувальних робіт вимикають вимикач S1, контактор КМ. відключається, знімаючи збудження з генераторів G2, G1 і двигуна М1.
Після цього приступають до перевірки ланцюгів управління під напругою, для чого кнопку SB3 утримують натиснутою.
Контрольні питання
1. Яке призначення суднових систем кренування і диферента?
2. Яких типів насосів використовуються в системах кренування і диферента?
3. Яких способів звільнення корпусу судна, затиснутого в льодах, використовуються
на практиці?
4. Які основні параметри систем кренування і диферента? Як вони визначаються?
5. Поясните роботу схеми управління електродвигуном насоса кренової системи в ручному режимі управління
6. Поясните роботу схеми управління електродвигуном насоса кренової системи в режимі дистанційного керування
7. Поясните роботу схеми управління електродвигуном насоса кренової системи в режимі автоматичного управління
8. Яким чином підготувати до налагоджувальних робіт схему управління електродвигуном насоса кренової системи?
Розділ 3. Електроприводи заспокоювачів хитавиці
§ 3.1. Основні відомості
Заспокоювачі ( стабілізатори ) хитавиці призначені для зменшення крену судна, який в штормових умовах досягає 35, - 40°.
Вони застосовуються, в основному, на пасажирських судах і морських поромах.
Основним елементом заспокоювачів хитавиці є бортове кероване кермо.
Це кермо є несучі крила симетричного профілю, що розташовуються на скулі в районі площини миделя. Кермо повертається щодо осі балера на кут ± (20 - 25)° електрогідравлічним приводом.
Момент, вирівнюючий судно, створюється шляхом освіти на кермі підйомних сил, залежних від квадрата швидкості ходу.
При малих швидкостях, задньому ході, коли ефективність стабілізації низка, кермо забирається в спеціальні ніші, що розташовуються уздовж бортів судна.
Виготовлення або прибирання керма здійснюються за допомогою спеціальних гідроприводів, що мають місцеве і дистанційне (з рульової рубки) управління.
Принцип дії бортового керма
Використовуємо для пояснення принцип дії рулюючи рисунки 8, а, б, в і г.
Розглянемо принцип дії бортового керма.
Хай судно рухається вперед, а перо керма розташоване в горизонтальній площині ( рис. 8, а ). Вода рівномірно обтікає верхню і нижню площини рулюючи і тому не чинить тиску на перо рулюючи.
При опусканні руля ( рис. 8, б ) вода починає тиснути на нижню площину з силою Р. Цю силу можна розкласти на дві складові: горизонтальну Рх вертикальну Ру.
Сила Рx направлена протилежно руху судна і гальмує його.
Сила Ру підводить праву половину судна і створює крен на лівий борт.
При підйомі керма ( рис. 8, в ) відбувається зворотне явище: сила Ру підводить ліву половину судна і створює крен на правий борт.
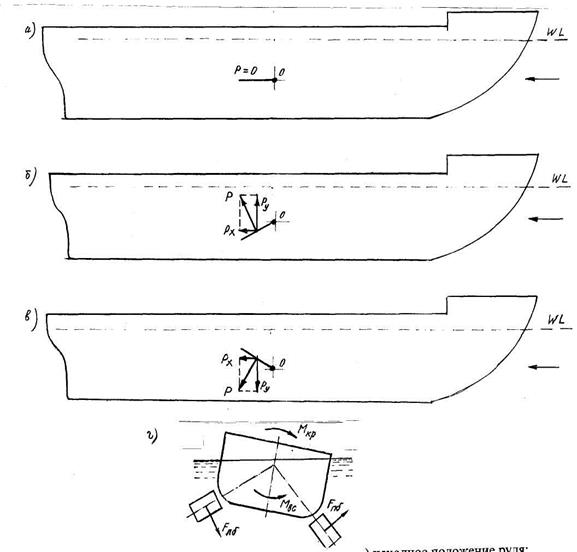
Рис. 8. Принцип дії заспокоювача хитавиці: а ) початкове положення правого керма; б ) кермо опущене; г ) кермо підняте; г ) схема дії гідродинамічних сил на бортовому кермі ( вигляд з боку корми судна )
Оскільки кермо розташоване з різних бортів, вони повертаються завжди в протилежні сторони. Наприклад, при крені судна на правий борт кермо правого борту треба опустити, а лівого – підняти. При цьому виникає поновлюючий момент Мвос, який направлений назустріч моменту Мкрен, що кренить, компенсує його ( рис. 8, г ).
Рулі – висувні, вони розташовуються в корпусних нішах. Якщо хитавиці немає, кермо втоплене в нішах. При появі хитавиці кермо висувається з ніш за допомогою гідроприводів.
Розміри керма залежать від заданого коефіцієнта зменшення хитавиці і швидкості ходу. Форма керма – прямокутна. Відношення довжини до ширини руля
λ =  ≤ 2, ( 7 )
≤ 2, ( 7 )
де l – довжина руля, м;
b – ширина руля, м.
Для підвищення ефективності бортове кермо часто виконує розрізним.
При цьому на задній кромці керма пристроюється так
званий закрилок, який сприяє значному збільшенню підйомної сили рулюючи ( такі ж закрилки використовують на крилах літальних апаратів ).
Потужність виконавчого двигуна бортового керма.
В процесі зменшення хитавиці бортове кермо випробовує періодичні відхилення від середнього положення.
При цьому робочий період відхилення пов'язаний з частотою хитавиці.
Потужність електроприводу при такій роботі рулюючи також періодично змінюється. У електрогідравлічному приводі частота обертання приводного двигуна гидронасоса стабільна, а подача насоса залежить від характеру зміни моментів на балері руля, показаного за допомогою діаграми навантаження рулюючи ( рис. 9 ).
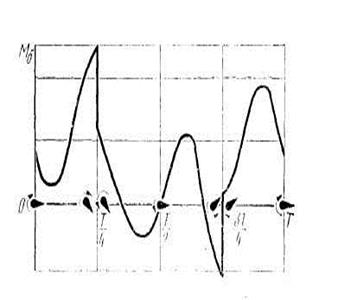
Рис. 9. Типова діаграма моментів на балері бортового керма
Діаграма навантаження на балері є кривою зміни моменту у функції часу за робочий період хитавиці, тобто М  ( t ).
( t ).
Момент на балері визначається умовами обтікання бортового керма і змінюється в процесі його повороту. Гідродинамічні характеристики рулюючи, його геометричні параметри встановлюються виходячи із загального завдання, пов'язаного із ступенем стримування хитавиці.
В процесі рішення цієї задачі методами фізичного або математичного моделювання для прийнятих умов плавання визначаються граничні параметри роботи бортового керма:
1. максимальний кут перекладання δ  ;
;
2. розрахунковий період перекладання Т;
3. максимальний кут крену судна θ  ;
;
4. швидкість бортової хитавиці судна протягом періоду θ';
5. швидкість бічного потоку від вертикальної і кильової хитавиці U і ін.
При розрахунку діаграми навантаження приводу повороту керма заспокоювачів хитавиці допустиме використання загальної методики, розглянутої стосовно кормового профільного керма. При цьому слід враховувати, що робота керма правого і лівого бортів відбувається синхронно, але в протифазі.
Момент на балері керма представлятиметься як сума окремих складових
М  = М
= М  + М
+ М  + М
+ М  , ( 8 )
, ( 8 )
де Мг - гідродинамічний момент основного керма;
М - момент тертя в опорах балера;
М  - додатковий момент, створений закрилками.
- додатковий момент, створений закрилками.
Гідродинамічний момент профільного керма залежить від площі і ступеня компенсації рулюючи, квадрата швидкості набігання потоку, кута атаки.
Безрозмірний коефіцієнт моменту з  може бути знайдений аналогічно як і для кормового керма за наслідками продування використовуваного профілю.
може бути знайдений аналогічно як і для кормового керма за наслідками продування використовуваного профілю.
Кут атаки бортового керма
α = δ +  ±
±  , ( 9 )
, ( 9 )
де δ – кут повороту рулюючи;
r  відстань між центром тяжіння пера рулюючи і віссю подовжньої інерції судна;
відстань між центром тяжіння пера рулюючи і віссю подовжньої інерції судна;
v– швидкість ходу судна.
Другий і третій члени виразу ( 9) є кутами скосу потоку від бортової і вертикальної хитавиці відповідно.
У заспокоювачах хитавиці, що працюють в режимі стабілізації, як правило, реалізується синусоїдальний або трапецеїдальний закони зміни ексцентриситету насоса.
У останньому випадку перекладання керма проводиться за коротший відрізок часу.
В результаті цього рулюй більший час періоду будуть відхилені на максимальний кут, створюючи підвищений поновлюючий момент, збільшуючи ефективність роботи заспокоювача.
Кутова швидкість хитавиці і змінюється по періодичному закону. Її початкова фаза і амплітуда щодо кута перекладання керма знаходяться з рішення загального рівняння хитавиці стабілізованого судна.
У першому наближенні впливом вертикальної хитавиці на зміну кута атаки бортового керма можна нехтувати. Таким чином, використовуючи рівність (9), що реалізовує зміну кута атаки в часі, можна знайти значення гідродинамічного моменту на балері М (t) за один період коливального процесу.
Додатковий момент на балері, обумовлений наявністю закрилка, може бути орієнтування обчислений методами, викладеними в [4].
Разом з тим найбільш доцільне фізичне моделювання роботи бортового керма, яке дає найбільш точні результати.
Момент тертя в опорах балера легко визначається по конструктивних розмірах опор і силах реакцій в них
М  =
= 
 , ( 10 )
, ( 10 )
де μ  - коефіцієнт тертя в i-ої опори;
- коефіцієнт тертя в i-ої опори;
R  сила реакції на i-ої опори;
сила реакції на i-ої опори;
r  - радіус цапфи на i-ої опори.
- радіус цапфи на i-ої опори.
Типова характеристика на балері бортового стабілізуючого керма показана на рис. 9.
Положення характеристики навантаження істотним чином залежить від швидкості ходу судна і від положення осі обертання щодо довжини профілю.
Крім того, побудована крива відображає значення моменту в сталому режимі стабілізації, коли амплітуда крену відносно невелика.
У початковий період після висунення керма, коли розмах хитавиці великий, максимальні моменти на балері можуть значно перевищувати розрахункові значення сталого режиму.
В цьому випадку в системі гідроприводу використовуються запобіжні клапани, що обмежують максимальний робочий тиск і відповідно момент на виконавчому двигуні.
Потужність рульового виконавчого двигуна розраховується на основі діаграми навантаження ( рис. 9 ).
Враховуючи, що діаграма навантаження побудована у функції часу, потужність, необхідну для приведення в дію бортового керма в кожен момент часу, можна знайти по наступному виразу:
Р = 
 , ( 11 )
, ( 11 )
де η - сумісний к.к.д. насоса і плунжерної рульової машини.
Значення із залежить від параметрів навантаження.
Для великих моментів на балері η = 0,6…0,7 і зберігається приблизно постійним.
У зоні малих навантажень до. п. д. приводу різко падає, тому при моментах М  >0,2М
>0,2М  приймають потужність приводу близькою до потужності холостого ходу.
приймають потужність приводу близькою до потужності холостого ходу.
Еквівалентна потужність електродвигуна визначиться як середньоквадратична потужність за цикл роботи
Р  =
=  ( 12 )
( 12 )
Найдоцільніше еквівалентну потужність знаходити методом шматково-лінійної апроксимації.
В цьому випадку період перекладання розбивається на ряд відрізків часу, де момент на балері і швидкість перекладання керма усереднюються і приймаються постійними.
Допустимо також графічна інтеграція виразу ( 12).
На відміну від кормового керма управління, де параметри гідравлічної передачі впливають на швидкість перекладання і відповідно визначають потужність ВД, в системах бортового керма стабілізації хитавиці завищення характеристик гідроприводу не приводить до збільшення потужності електроприводу.
Наприклад, вибір насоса підвищеної подачі, порівняно з необхідною, не може привести до зменшення періоду перекладання рулюючи, який повинен підтримуватися регулюючою системою рівним періоду вільних бортових коливань судна.
Отже, в даному випадку необхідною умовою використання насоса буде обмеження його максимальної подачі.
Таким чином, потужність електроприводу бортового керма може визначатися по формулі (6.5) без попереднього встановлення параметрів і характеристик елементів гідравлічної системи, що значно спрощує розрахунок.
§ 3.2. Заспокоювачі хитавиці як система автоматичного управління
Для успішного стримування хитавиці необхідно створити значні стабілізуючі моменти. Більш того, необхідно забезпечити потрібний закон зміни сил стабілізації в часі з метою отримання найбільшого ефекту зменшення бортової хитавиці судна.
Узагальнена структурна схема стабілізатора хитавиці ( рис. 10 ) включає:
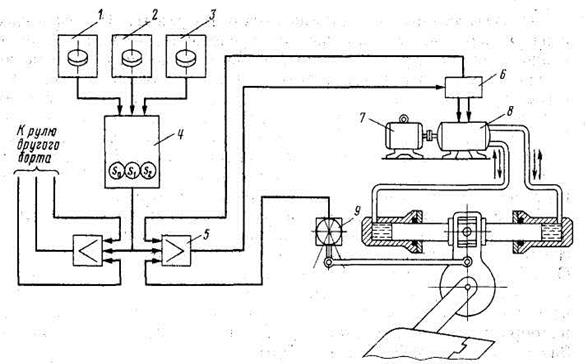
Рис. 10. Структурна схема системи управління заспокоювачами хитавиці:
1 – датчик крену, виробляє напругу, пропорційну куту крену;
2 – датчик швидкості бортової хитавиці, його напруга пропорційна швидкості руху корпусу судна при хитавиці;
3 – датчик прискорення, його напруга пропорційна прискоренню корпусу судна при хитавиці;
4 – прилад управління, в нім підсумовуються сигнали датчиків 1, 2, 3;
5 – підсилювач сигналу управління;
6 – прилад управління насосом змінної подачі, до складу якого входить датчик подачі насоса ( тобто швидкості перекладання рулюючи );
7 – приводний електродвигун насоса змінної подачі;
8 – насос змінної подачі;
9 – датчик кута перекладання руля.
При виникненні хитавиці сигнали датчиків 1, 2, 3 поступають в прилад управління 4 і підсумовуються в нім. Сумарний сигнал через підсилювач 5 поступає в прилад 6.
В результаті насос починає нагнітати масло в один з циліндрів гідроприводу і всмоктувати з іншого. Кермо повертається і створює поновлюючий момент.
Сигнали зворотних зв'язків з приладів 6 і 9 поступають в підсилювач 5. Застосування цих двох приладів дозволяє отримати стежачий режим роботи системи управління.
При стабілізації бортової хитавиці узагальненою координатою, що характеризує положення об'єкту, буде крен судна і.
Кінематичні механізми управління гідроприводом бортового керма з насосами змінної подачі адекватні аналогічним елементам кормового керма.
Чисельне значення відносного зменшення амплітуди хитавиці судна, пов'язане з роботою заспокоювача, визначає ступінь стримування ( ослаблення ) хитавиці.
Енергетичні можливості заспокоювача не завжди бувають достатніми для повної компенсації зовнішніх обурень і вільних коливань в умовах сильного хвилювання. Тому залишкова хитавиця судна завжди зберігається. Коефіцієнт стримування хитавиці сучасних систем стабілізації складає 3.8.
Особливість роботи системи автоматичного управління бортовим кермом полягає в їх безперервних періодичних перекладаннях в протифазі моменту судна, що кренить.
Період бортової хитавиці судів складає 6…8 с. В цих умовах при стабілізації великої значущості набувають фазові співвідношення між креном судна і кутом перекладання рулюючи, які характеризують динамічні помилки системи автоматичного регулювання. У системах підвищеної якості стабілізації використовуються ПИД-регулятори з додатковою корекцією по другій похідній кута крену.
Закон регулювання в загальному випадку визначається рівнянням
Δ = А  θ + А
θ + А 
 + А
+ А 
 + А
+ А 
 ( 13 )
( 13 )
Ефективність окремих складових сигналу, що управляє, позначається різним чином.
Ступінь впливу по куту крену і збільшується в зонах низьких частот хитавиці.
Управління по похідній сприяє підвищенню демпфуючої дії стабілізації, рівним чином що знижує вимушені і вільні коливання судна.
В області обурюючих частот, близьких до резонансних, управління по кутовій швидкості найдоцільніше.
Регулювання по прискоренню реалізується з метою введення в сигнал управління попередження щодо сигналу швидкості для компенсації динамічних фазових помилок, що виникають в системі регулювання, особливо в смузі частот вище резонансною.
Інтегральна складова зумовлює деяку початкову закладку бортового керма для вирівнювання дії постійно направлених сил, що кренять.
В цьому випадку кути перекладань керма стають декілька несиметричними.
У окремому випадку інтегратор сприяє вирівнюванню постійного крену судна.
Пост управління (ПУ) має прилади вимірювання регулюючих параметрів хитавиці, а також елементи настройки, що дозволяють оптимізувати процес стабілізації. Пост містить також командні пристрої дистанційного запуску насосів, виготовлення системи до дії, включаючи висунення керма.
§ 3.3. Системи управління електроприводами систем заспокоювачів хитавиці
Як приклад розглянемо систему заспокоювачів хитавиці теплохода «Михайло Лермонтов».
Устаткування заспокоювача розроблений фірмою «Денні Браун АЕГ» ( ФРН ).
Ефективна робота заспокоювача гарантується, починаючи з швидкості руху судна 12 і більше вузлів.
Максимальний кут розвороту крил σ = ±20°. Вертикальна складова підйомної сили крила для повної швидкості судна 20 уз при σ = 20° складає 585 кН.
Бортове кермо забирається методом завалення в бортові ніші.
Сама ніша виконується у вигляді єдиної конструкції і поставляється комплектно з механізмом гідроприводу заспокоювача хитавиці (рис. 11 ).
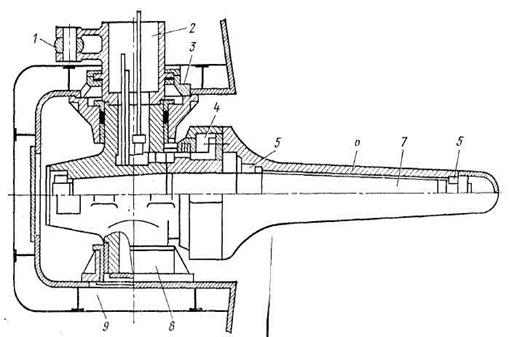
Рис. 11. Конструкція заспокоювача хитавиці фірми «Денні Браун АЕГ»:
1 – тяга гідроциліндра завалення руля; 2 – балер завалення рулюючи; 3 – верхній підшипник; 4 – лопастева рульова машина; 5 – підшипники балера руля; 6 - перо руля; 7 – балер руля; 8 – нижній підшипник; 9 – ніша
Дата добавления: 2015-09-11; просмотров: 900;