ИДЕНТИФИКАЦИЯ ТЕХНОЛОГИЧЕСКИХ ОБЪЕКТОВ И ПРОЦЕССОВ
1.1 Этапы разработки автоматизированных техпроцессов и систем (4 часа).
Разработка систем автоматизации любых технологических процессов и объектов включает в себя следующие взаимосвязанные этапы:
1. Общие изучения управляемого технологического процесса и автоматизированного технологического оборудования, с помощью которого этот процесс реализируется.
2. Идентификацию технологического процесса (ТП) как объекта автоматизации - разработку новой или обоснование одной из известных его математических моделей. ТП или выбора его параметров в соответствии с выбранными критериями и накладываемыми ограничениями.
3. Инженерный синтез САУ ТП, реализирующий принятый алгоритм управления с желаемой степенью точности его воспроизведения.
4. Разработку и конструирование всего комплекса автоматизированной технологической системы с учетом дополнительных требований энергетического, эксплуатационного, надежностного, экологического и технико-экономического характера.
ТО идентификация объекта автоматизации является одним из необходимых и первоначальных этапов работы.
1.2. Модели в процессах познания и управления.
Проблема создания моделей характерна для процесса познания вообще, целью которого является синтез моделей, отражающих интересующие ее специфические особенности изучаемого явления или объекта.
Под моделью понимают рассуждения на каком-либо языке - разговорном, математическом, графическом, алгоритмическом и т.д., позволяющие имитировать наблюдаемое явление, т.е., например, эффективно предсказывать его следствия по причинам. Такие модели выступают в виде некоторого "преобразователя" (рис. 1), описывающего причинно-следственные связи каждого объекта или явления.
|
Примеры познавательных моделей, сформулированных на математическом языке: закон Ньютона, Ома, Фарадея, Ленца и т.д. Эти модели отражают специфические взаимосвязи причин и следствий объектов при определенных допущениях.
Формализуем рассуждения о причинно-следственных связях. Обозначим причину буквой X, следствие — Y. Связь между ними запишем условно в виде
Y = FM(X)
(1)
где FM - правило преобразования причины X в следствии Y.
Уравнение (1) называют моделью объекта (явления), a FM - оператором модели. Модельным оператором FM описываются причинно-следственные связи, существующие в объекте, согласно нашим представлениям о его свойствах.
Истинные связи X и Y в реальном объекте аналогично (1) можно представить с помощью оператора объекта Fo:
Y = F0(X)
(2)
Задача разработки модели заключается в построении (синтезе) модельного оператора FM, достаточно близкого в смысле некоторого критерия оператору объекта Fo , т.е. чтобы существовала возможность на основании оператора FM достаточно точно предвидеть изменение Y в реальном объекте. Т.О., процессом разработки модели в широком смысле является процесс синтеза модельного оператора FM близкого к Fo, т.е.
FM  Fo (3)
Fo (3)
Для познавательных моделей, представляющих наиболее широкий класс моделей, характерно использование многообразных языков описания (форм и способов представления оператора FM) - от словесного до специальных языков схем, графиков и математических формул. Вторая (основная) особенность познавательных моделей заключается в том, что в них стремятся указать все причинно-следственные связи, имеющиеся у объекта и выявленные в процессе его изучения. Иными словами, в таких моделях в структуре оператора FM отражают механизм объекта или явления и пытаются определить не только, как взаимосвязаны X и Y, но и почему в изучаемом объекте существуют причинно-следственные связи.
Другой тип моделей - это кибернетические, информационные модели, синтезируемые для целей управления. Такие модели могут и не отражать внутренних механизмов явлений и объектов, что совершенно необходимо для познавательных моделей. Информационные модели должны лишь изготавливать определенную формальную связь между входом и выходом объекта, а не копировать его физическую сущность. Поэтому информационные модели объекта разной физической природы могут быть одинаковы. Так, например, в ТАУ широко используют понятие типовых динамических звеньев. При этом элементы разные по конструктивному наполнению и физической природе, объединяются в одну группу типовых звеньев в связи с тем, что их динамические свойства описываются одинаковыми дифференциальными уравнениями, т.е. имеют аналогические модели.
1.3. Математические модели автоматизированных систем и объектов
управления. Методы синтеза математических моделей.
Далее объекты, явления, техпроцессы будем называть объектами автоматизации (ОА).
|
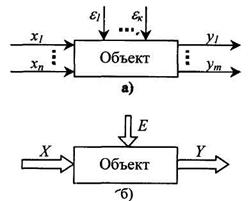
Исследуемый ОА удобно представить в виде многополосника, изображенного на рис.2, а. В общем случае ОА под действием многочисленных входных воздействий, среди которых можно выделить наблюдаемые (контролируемые) входные переменные х1,..., хn и ненаблюдаемые  . Состояние объекта можно характеризировать его выходными переменными у1, ...,ут. Такой многомерный объект удобно описывать в векторной форме (рис. 2, б), представив входные переменные в виде векторов.
. Состояние объекта можно характеризировать его выходными переменными у1, ...,ут. Такой многомерный объект удобно описывать в векторной форме (рис. 2, б), представив входные переменные в виде векторов.
| Рис.2. Представление объекта познания |
X = (х1,..., хn); Y = (у1, ...,ут); Е =( )
Выходной вектор Y связан с входным некоторым
заранее неизвестным оператором Fo: Y=Fo(X, E). Однако подчеркнем еще раз, в процессе разработки модели выявляется не оператор ОА, а оператор модели FM, связывающий наблюдаемые входы и выходы:
Y = FM(X)
(4)
Для одномерного объекта (один вход один выход) векторы X и Y вырождаются в скалярные переменные и выражение (4) принимает вид
y = FM(x)
(5)
Модели большинства ОА формулируются на языке математики, при этом выражения (4), (5) называют математической моделью (ММ) или математическим описанием ОА.
В широком смысле под ММ объекта понимают совокупность зависимостей, таблиц и графиков, количественно описывающих статистические и динамические связи между величинами, которые характеризуют функционирование объекта, а также вероятность характеристики этих величин.
Или более коротко, ММ - это правило преобразования на объект X в реакцию объекта Y. В общем случае правило преобразования задастся в форме оператора модели FM.
Напомним, что в математике под оператором понимают алгоритм трансформации функции в функцию или, иными словами, совокупность математических и логических операций, устанавливающих соответствие между двумя функциями. Простейшими примерами операторов являются операторы дифференцирования

и интегрирования

При постановке задачи идентификации понятие оператор вводится как самое общее. В частных случаях он может вырождаться в обычную функцию.
Методика синтеза ММ ОА в значительной степени зависит от объема доопытной (априорной) информации. В каждом конкретном случае под априорной информацией понимается информация об ОА, имеющаяся до проведения текущего этапа исследования объекта.
Предположим, что какая-либо информация об ОА отсутствует. В этом случае ОА относят к объектам типа «черный ящик». Тогда единственная возможность исследования ОА заключается в наблюдении за его входами и выходами и построении на этой основе ММ.
Обычно рассмотренная ситуация встречается редко. Как правило, известны принципы функционирования ОА, по крайней мере те, которые закладывались в ОА при его создании (объект является «серым ящиком»). В этом случае задачу разработки ММ решают в два этапа. На первом этапе на основе априорных сведений о физико-химических процессах, происходящих в ОА, составляется исходная структурная модель. Обычно эта модель содержит неизвестные параметры. Нахождения которых по априорным данным слишком сложно или невозможно. Кроме того, такая модель часто содержит некоторые элементы структуры, необходимость включения которых в модель не очевидна. В ходе второго этапа на основании экспериментальных исследований определяются неизвестные параметры ОА и уточняется его структура.
Процесс синтеза ММ на основе наблюдений (экспериментальных исследований), т.е. процесс выявления структуры и параметров оператора модели FM, называют идентификацией в широком смысле.
Принципиальные трудности выявления оператора FМ связаны с тем, что в процессе экспериментальных исследований некоторые переменные ОА (вектор Е) остаются ненаблюдаемыми.
Наконец в противоположность той ситуации, когда объект является «черным ящиком», возможен случай, когда имеется полная априорная информация об ОА (объект -«прозрачный ящик»). При этом возможно построение ММ аналогическим путем. По аналогии с предыдущим методом такой способ выявления FM оператора называют иногда аналитической идентификацией. Чисто аналитический путь получения ММ, в основном, применим лишь для хорошо изученных простейших ОА. Для сложных объектов после аналитического конструирования ММ, как правило, необходимы дополнительные экспериментальные исследования. Целью этих исследований является, во-первых, проверка правильности основных теоретических положений приняты при разработке ММ; во-вторых, выявление при необходимости некоторых параметров модели.
Указанная «комбинированная» схема исследования ОА весьма близка к схеме идентификации объекта типа «серый ящик». Отличие заключается в том, что при «аналитическом» методе формирования модели основной объем исследования приходится на глубокий теоретический анализ причинно-следственных связей между переменными и выявление закономерностей, определяющих протекание процессов в ОА. Это позволяет резко уменьшить объем экспериментальных исследований.
В процессе разработки ММ, естественно возникает вопрос, как оценить «близость» оператора FМ оператору объекта F0, т.е. как проверить выполнение соотношения (3). Свойства ОА и ММ сравнивают по их реакциям (откликом) на одно и то же входное воздействие.
Пусть реакция одномерного объекта описывается некоторой функцией  , а реакция модели -
, а реакция модели -  . Тогда степень близости этих реакций в каждый момент времени естественно оценить, например, разностью
. Тогда степень близости этих реакций в каждый момент времени естественно оценить, например, разностью
 (6)
(6)
или модулем этой разности.
Для оценки близости и на всем интервале наблюдения (0,  ) часто используется интегральный показатель (функционная)
) часто используется интегральный показатель (функционная)
 (7)
(7)
Здесь Ay(t) берется в квадрате для того, чтобы отклонения разных знаков взаимно не компенсировались.
Для многомерных объектов отклонение векторов YM(t) выхода модели от вектора Yо(t) выхода ОА в каждый момент времени можно оценить, например, значением квадрата разности этих векторов
 (8)
(8)
где т — количество выходных переменных ОА.
В зависимости от свойств ММ и ОА используют и другие формы оценок близости их реакций. Очевидно, что в общем случае при разработке ММ следует стремиться минимизировать выбранную оценку близости.
В случае, когда можно определить структуру модели (прибора) ОА неизвестные коэффициенты этой модели выбираются по методу наименьших квадратов (МНК).
Пусть структура модели О А задана в следующим виде:
 (9)
(9)
где у - выходная величина;  - входные параметры;
- входные параметры;  - коэффициенты модели.
- коэффициенты модели.
Модели (9) является весьма общим, т.е. параметры ее могут быть различными функциями (например 

 и т.д.). Существенно, что модель
и т.д.). Существенно, что модель
линейна по отношению к неизвестным коэффициентам  .
.
Для каждой точки экспериментальных данных можно составить по (9) условное уравнение

и подчитать квадрат отклонения (ошибки) по формуле
 (10)
(10)
где  - соответственно эмпирическое и полученное по модели значение выходной величины в i-той точке;
- соответственно эмпирическое и полученное по модели значение выходной величины в i-той точке;  - значения входных параметров в i-той точке. Фактически
- значения входных параметров в i-той точке. Фактически  и
и  значение выходной переменной полученные с помощью оператора объекта Fo и оператора модели FM.
значение выходной переменной полученные с помощью оператора объекта Fo и оператора модели FM.
Уравнение вида (9) составляемые для всех N точек таблицы экспериментальных данных, образуют так называемую систему главных уравнений Гаусса. Суммируя уравнения вида (10) для всех N экспериментальных точек, получим
 (11)
(11)
Метод наименьших квадратов заключается именно в минимизации выражения (11). Минимальное значение Δ2 называется остаточной суммой квадратов (обозначается RSS), или точностью по МНК. Иначе говоря, МНК заключается в таком расчете оценок коэффициентов модели  , для которых выражение (11) минимально.
, для которых выражение (11) минимально.
Для вычисления минимума (11) находим выражения для частных производных по всем известным коэффициентам а, и приравниваем их к нулю:


 …;
…; 
Отсюда получим систему так называемых уравнений Гаусса для уравнения (9):
 (12)
(12)
Решая систему по методу Гаусса, получим оценки коэффициентов модели.
Систему условных уравнений Гаусса для ОА подлежащего идентификации можно представить в математическом виде
Ха=у, (13)
где
 ;
;  ;
;  , (14)
, (14)
X - Nxn - прямоугольная матрица условных уравнений; обычно N»п; N — число опытов; п - число аргументов (входных переменных); а - столбец коэффициентов; у -столбец наблюдений выходной величины.
Для получения системы нормальных уравнений Гаусса надо умножить (слева) матрицу Х на транспортированнуюХTХа=ХTy
(15)
Произведение матриц ХTХ есть квадратная п  п нормальная матрица. Умножив обе части матричного уравнения на обратную матрицу
п нормальная матрица. Умножив обе части матричного уравнения на обратную матрицу
 (16)
(16)
где  , получим решение системы нормальных уравнений:
, получим решение системы нормальных уравнений:
 . (17)
. (17)
Пример
1) Для прямой

 (18)
(18)
ЛЕКЦИЯ…. Классификация математических моделей.
Формы представления оператора модели.
Одна из классификаций ММ основана на характерных, особенностях ОА в качестве которых выбраны следующие признаки: динамичность α; стохастичность β; нелинейность γ; дискретность λ. По этим признакам ОА можно характеризировать структурной четверкой.
О = (αβγλ)
Такое описание называют кодом ОА. Каждый из указанных признаков может быть присужден ОА (иметь значение 1) или отсутствовать (принимать значение 0). Поясним смысл признаков.
1. Признак динамичности α. Объект называют динамическим (α = 1), если изменение его выхода зависит от значений входа не только в текущий момент времени, но и в предыдущие моменты. Т.е. это объект обладающий инерционностью или запаздыванием. В противоположном случае объект называют статическим (а = 0).
2. Признак стохастичности β. Объект называют стохастическим (β = 1), если поведение его выхода зависит от неконтролируемых (ненаблюдаемых) входов ОА или он сам содержит неконтролируемый поток случайных возмущений. В противном случае ОА называют детерминированным (β = 0).
3. Признак нелинейности γ. Объект называют нелинейным (γ = 1), если его реакция на два различных возмущения входа не эквивалентна сумме реакций на каждое из этих возмущений в отдельности. Для линейного объекта (γ = 0) выполняются принцип суперпозиции; сумме нескольких входных воздействий вызывают реакцию, равную сумме реакций на каждое воздействие в отдельности.
Характеристики объектов, не имеющих явных нелинейностей можно линеаризовать, упростив этим ММ.
4. Признак дискретности λ. Объект называют дискретным (λ = 1), если состояние его входов и выходов изменяется лишь в дискретные моменты времени. Если же входы и выходы изменяются и измеряются непрерывно.
Формы математического описания оператора модели FM в полной мере определяются кодом ОА. Рассмотрим основные из них. При записи кода будем заменять признаки α, β, γ, λ единицей, когда этот признак присущ ОА, или нулями, когда признак отсутствует. Если наличие или отсутствие одного из признаков не существенно для формы математического описания, будем оставлять в записи кода соответствующие буквенные обозначение этого признака.
Сложность математического описания нарастает по мере увеличения единиц в коде. Начнем с простейших случаев.
Дата добавления: 2015-11-18; просмотров: 2036;