Пропорциональный закон регулирования, П - закон.
Уравнение закона регулирования  (7-1)
(7-1)
В этом случае каждому значению входного параметра  соответствует определенное положение регулировочного органа
соответствует определенное положение регулировочного органа  . Регулятор, реализующий П-закон регулирования, называется П-регулятором.
. Регулятор, реализующий П-закон регулирования, называется П-регулятором.
Передаточная функция регулятора  . (7-2)
. (7-2)
Статическая характеристика пропорционального регулирования (Рис. 7.2)

Рис. 7.2 Статическая характеристика.
 - коэффициент передачи (усиления) регулятора
- коэффициент передачи (усиления) регулятора
Для замкнутой АСР, состоящей из ОР и П - регулятора, характерно наличие остаточного отклонения регулируемой величины или ошибки, по окончанию процесса регулирования.
 -коэффициент неравномерности или статизм регулирования для П – регулятора, определяет величину погрешности регулирования в установившихся процессах.
-коэффициент неравномерности или статизм регулирования для П – регулятора, определяет величину погрешности регулирования в установившихся процессах.
Динамическая характеристика П - регулятора. (Рис. 7.3)
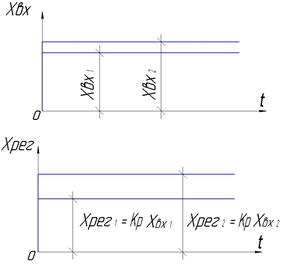
Рис. 7.3 Динамическая характеристика П-регулятора.
Динамическая характеристика АСР с П-регулятором (Рис. 7.4).
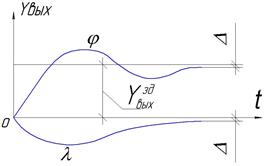
Рис. 7.4 Переходные процессы в АСР с П-регулятором при управляющем (1) и возмущающем (2) воздействии.
Настроечным параметром П – регулятора является  - его коэффициент неравномерности. При настройке устанавливают допустимые отклонение регулируемого параметра от заданного значения в статике – погрешность регулирования.
- его коэффициент неравномерности. При настройке устанавливают допустимые отклонение регулируемого параметра от заданного значения в статике – погрешность регулирования.
Достоинство П - регуляторов – динамичность; регулятор вступает в действие сразу после получения сигнала на его вход .Недостатком регулятора является наличие ошибки регулирования в статике. От ошибки не избавится, так как статическая характеристика П- регулятора имеет наклон, величина которого зависит от коэффициента неравномерности  .
.
Интегральный закон регулирования, И – закон.
Уравнение закона регулирования  (7-3)
(7-3)
Проинтегрировав уравнение (7.3) получим
 ,
,
где  - коэффициент передачи, характеризующий скорость нарастания сигнала на выходе после нанесения воздействия .
- коэффициент передачи, характеризующий скорость нарастания сигнала на выходе после нанесения воздействия .
Передаточная функция интегрального (И) регулятора
 (7-4)
(7-4)
Другая формула записи И- закона регулирования
 (7-5)
(7-5)
Передаточная функция интегрального (И) регулятора
 , (7-6)
, (7-6)
 - условный коэффициент передачи И- регулятора,
- условный коэффициент передачи И- регулятора,
 - условная постоянная времени интегрирования.
- условная постоянная времени интегрирования.
Скоростная характеристика И – регулятора
Рис. 7.5 Скоростная характеристика И-регулятора
Чем больше , тем больше угол наклона  при одинаковой величине воздействия.
при одинаковой величине воздействия.
Статическая характеристика регулятора (рис.7.6)
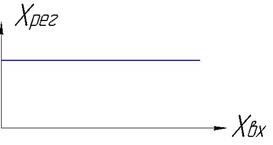
Рис. 7.6 Статическая характеристика И-регулятора
Достоинство И- регулятора - отсутствие статической погрешности регулирования.
Динамическая характеристика И-регулятора (Рис.7.7).
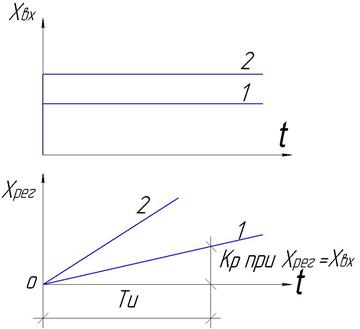
Рис. 7.7 Динамическая характеристика И-регулятора
Чем больше по величине сигнал на входе регулятора, тем выше скорость перемещения регулировочного органа при одном и том же воздействии. Чем больше , тем больше скорость перемещения регулировочного органа.
Пропорционально - интегральный закон регулирования. ПИ – закон.
Преимущества П - регулятора (его динамичность) и И - регулятора (отсутствие в статике погрешности регулирования) объединены в ПИ – законе и соответственно в ПИ-регуляторе, когда регулировочные органы перемещаются со скоростью, пропорциональной величине и скорости изменения входного сигнала поступающего на ПИ – регулятор.
Уравнение
 (7-7)
(7-7)
Проинтегрировав уравнение (7.7), получим (7.8)
 (7-8)
(7-8)
Передаточная функция для ПИ-регулятора.
 (7-9)
(7-9)
Динамическая характеристика ПИ-регулятора.
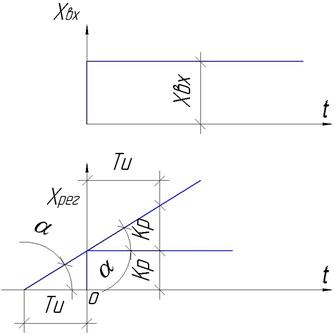
Рис. 7.5 Динамическая характеристика ПИ-регулятора
В замкнутой одноконтурной АСР, состоящей из ОР и ПИ-регулятора отсутствует остаточная погрешность регулируемого параметра. В то же время при установившемся значении регулируемого параметра регулирующий орган может занимать различные положения.
Параметры настройки ПИ – регулятора: и  .
.  .
.
Пропорционально-дифференциальный закон регулирования, ПД – закон.
П, И, ПИ-регуляторы реагируют только на возникшие нарушения технологического процесса. Если же регулируемая величина  в какой то момент времени начинает быстро отклонятся от заданного значения, то это значит, что на ОР поступило значительное воздействие и что отклонение в результате этого может быть так же значительным.
в какой то момент времени начинает быстро отклонятся от заданного значения, то это значит, что на ОР поступило значительное воздействие и что отклонение в результате этого может быть так же значительным.
В этом случае целесообразно, чтобы регулятор вырабатывал регулирующее воздействие пропорционально скорости отклонения от  .
.
С этой целью в состав АСР вводят дифференциатор- устройство, позволяющее формировать в законе регулирования сигнал, пропорциональный скорости изменения регулируемой величины (Рис. 7.9).
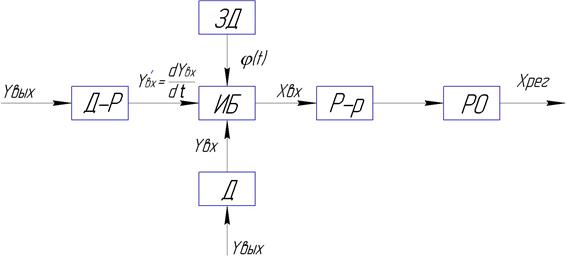
Рис. 7.9 структурная схема ПД-регулятора
Д-р – дифференциатор, Р-р – П-регулятор
Закон регулирования:
а) для идеального дифференциатора
 (7-10)
(7-10)
Передаточная функция ПД - регулятора
 (7-11)
(7-11)
б) для реального дифференциатора
 (7-12)
(7-12)
Передаточная функция реального дифференциатора
 (7-13)
(7-13)
Здесь - коэффициент передачи собственно регулятора, 
 - коэффицент усиления дифференциатора,
- коэффицент усиления дифференциатора,
 - постоянная времени дифференциатора – время действия дифференциатора.
- постоянная времени дифференциатора – время действия дифференциатора.
При отклонении регулируемого параметра на выходе регулятора мгновенно появляется сигнал от действия дифференцирующего устройства и затем сигнал от пропорциональной его составляющей.
В установившемся движении АСР сигнал от дифференциатора спадает до нуля и остается сигнал П - составляющей, равный .
Динамическая характеристика ПД-регулятора (Рис.7.10)
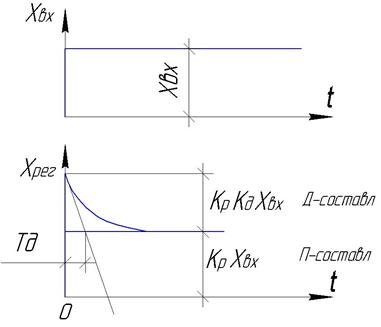
7.10 Динамическая характеристика ПД- регулятора
Параметры настройки ПД –регулятора . ,
Время определяют как время полуспада сигнала напряжения на выходе дифференциатора от  до
до  (Рис. 7.11)
(Рис. 7.11)

Рис. 7.11 Изменение выходного сигнала дифференциатора.
 ,
,  - время полуспада сигнала.
- время полуспада сигнала.
Применение дифференциатора сокращает время переходного процесса  и уменьшает первую амплитуду изменения регулируемой величины, что улучшает динамику регулирования.
и уменьшает первую амплитуду изменения регулируемой величины, что улучшает динамику регулирования.
Дата добавления: 2015-11-10; просмотров: 4282;