Погрешность глубиномера.
Процедура измерения координат дефекта состоит в определении положения преобразователя, соответствующего максимуму эхо-сигнала от дефекта, измерения глубиномером времени пробега УЗ импульса от преобразователя до дефекта и расчете координат дефекта по результатам измерений.
Глубиномер предварительно настраивают на скорость распространения используемого типа волн в материале изделия и исключают время пробега импульса в протекторе прямого или призме наклонного преобразователя.
При контроле наклонным преобразователем глубиномер позволяет измерять две координаты дефекта: глубину залегания его под поверхностью и расстояние от преобразователя до дефекта вдоль поверхности изделия. Для этого нужно (предварительно исключив время пробега ультразвука в призме преобразователя) настроить глубиномер на измерение указанных величин с учетом угла ввода преобразователя. Эта настройка аналогична настройке на скорость звука, но для каждой координаты ее нужно выполнять отдельно.
В соответствии с изложенным погрешности глубиномера могут быть связаны:
а) с неточностью измерения глубиномером времени пробега импульса;
б) с неточностью настройки глубиномера на скорость звука или на измерение координат дефекта;
в) с неточностью настройки задержки начала отсчета глубиномера для исключения времени пробега в протекторе или призме преобразователя.
Погрешности "б" и "в" войдут во все измерения, выполняемые глубиномером, поэтому они – систематические погрешности. Погрешность "а", также как погрешности, возникающие при выполнении других операций по измерению координат каждого дефекта (например, определение положения максимума эхо-сигнала), - случайная погрешность.
 Погрешность "а" проверяют по СО-2 или на изделии. Проверка заключается в измерении известных расстояний между поверхностями. При контроле прямым преобразователем удобно использовать многократные отражения между двумя параллельными поверхностями образца или изделия. При правильной работе глубиномера между ними должен быть постоянный интервал времени.
Погрешность "а" проверяют по СО-2 или на изделии. Проверка заключается в измерении известных расстояний между поверхностями. При контроле прямым преобразователем удобно использовать многократные отражения между двумя параллельными поверхностями образца или изделия. При правильной работе глубиномера между ними должен быть постоянный интервал времени.
 При этой проверке легко оценить погрешность "в". Интервал времени между зондирующим импульсом и первым донным сигналом будет больше других интервалов на время пробега импульса в протекторе и слое контактной жидкости.
При этой проверке легко оценить погрешность "в". Интервал времени между зондирующим импульсом и первым донным сигналом будет больше других интервалов на время пробега импульса в протекторе и слое контактной жидкости.
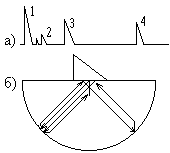
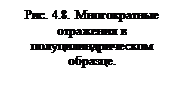
При контроле наклонным преобразователем удобно использовать многократные отражения между вогнутой цилиндрической поверхностью СО-3 и плоской поверхностью образца. На рис. 4.8, а показаны импульсы на развертке дефектоскопа: 1 – зондирующий; 2 – от границы преобразователь – образец (он иногда не виден); 3 – эхо-сигнал от вогнутой цилиндрической поверхности образца; 4- эхо-сигнал, отраженный от вогнутой поверхности, затем зеркально отраженный от плоской поверхности ввода, затем от вогнутой плоской поверхности и опять от вогнутой поверхности. На рис. 4.8, б одинаковые траектории импульсов показаны смещенными.
Времена прихода импульсов:
 ;
;  ;
;  ,
,
где П и сП – путь и скорость звука в призме; R – радиус вогнутой цилиндрической поверхности; с – скорость поперечных волн в образце. Время пробега в призме и погрешность "в" оценивают по формуле:
 .
.
Если дефектоскоп (как УД2-12) позволяет измерять время, то время пробега в призме t2 и погрешность "в" можно также оценить по формуле:
t2 = t3 – 33,7 мкс,
где 33,7 мкс – расчетное время пробега импульса в образце  .
.
Погрешность "б" проверяют только на изделии путем многократных измерений известных расстояний.
Дата добавления: 2015-08-14; просмотров: 5135;