Организация радиолокационного наблюдения и обработки радиолокационной информации
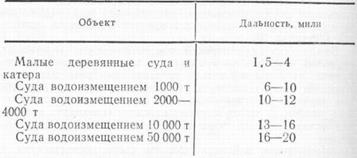
Радиолокационное наблюдение в условиях ограниченной видимости ведется непрерывно. Первоначальное наблюдение производится на шкале крупного масштаба (3 или 5 миль), затем индикатор переключается на 15-мильную шкалу. Для обнаружения мелких целей периодически производится просмотр горизонта на шкале крупного масштаба. Следует иметь в виду, что некоторые гидрометеорологические явления — снежный заряд, ливень, густой туман — могут понизить дальность радиолокационного обнаружения, а наличие помех на экране, например в свежую погоду, затрудняет выявление и классификацию целей. Ориентировочные дальности обнаружения некоторых объектов навигационными РЛС с высотой антенны 15 м при отсутствии помех приведены в след. таблице.
ТАБЛИЦА 18.1. ДАЛЬНОСТЬ ОБНАРУЖЕНИЯ НЕКОТОРЫХ ОБЪЕКТОВ НАВИГАЦИОННЫМИ РЛС С ВЫСОТОЙ АНТЕННЫ 15 М
Информация, получаемая с помощью радиолокатора, должна быть полной. «Предположения не должны делаться на основании неполной информации, и особенно радиолокационной» (МППСС, Правило 7 п. «с»). В условиях малой видимости нельзя ограничиваться только наблюдением за встречными целями на экране радиолокатора, т. е. измерением пеленгов и дистанций. Следует вести радиолокационную прокладку или равноценное систематическое наблюдение за обнаруженными объектами.
Большинство современных радиолокаторов воспроизводит относительное перемещение эхо-сигнала встречного судна, что недостаточно для всесторонней оценки обстановки. Радиолокатор, имеющий режим истинного движения, более удобен для грубой оценки обстановки, но также не в состоянии обеспечить командира корабля (штурмана, БИП) полной информацией, необходимой для выполнения маневра на расхождение.
Понятие «полнота радиолокационной информации» включает:
— непрерывное наблюдение за встречным судном и знание его относительного положения, т. е. пеленга и дистанции до него;
— наличие данных о характере движения встречного судна: о его курсе, скорости и их изменении;
— знание кратчайшего расстояния, на котором произойдет расхождение со встречным судном, и времени сближения до него.
Такая информация может быть получена по истечении некоторого времени после обнаружения встречного судна в результате ручной или автоматической обработки серии пеленгов и дистанций. Автоматическая обработка и выдача информации в указанном объеме возможны при наличии в комплекте радиолокатора вычислительного устройства.
Дата добавления: 2015-08-14; просмотров: 2378;