Как уже было сказано выше, изменение углов резца при установке его на станок рассматривают в статической системе координат.
Рассмотрим случай, когда вершина резца расположена ниже оси центров на величину h (рис.14), а углы l и j равны нулю. При расположении вершины резца по центру заготовки передний и главный задний углы соответственно равны  и
и  . Если вершину резца опустить ниже оси заготовки на величину h, то статическая система координат повернется на угол μ и углы будут соответственно равны
. Если вершину резца опустить ниже оси заготовки на величину h, то статическая система координат повернется на угол μ и углы будут соответственно равны  и
и  .
.
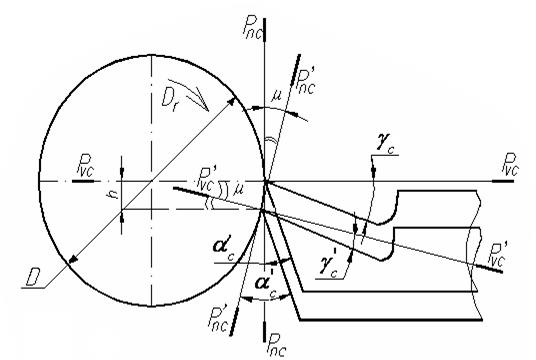
Рис.14 Изменение углов резца при установке его на станок
Из рисунка видно, что угол  уменьшился, а угол
уменьшился, а угол  увеличился на величину угла μ. Соответственно углы и будут равны:
увеличился на величину угла μ. Соответственно углы и будут равны:
Если угол  будет отличен от нуля (j¹0), угол
будет отличен от нуля (j¹0), угол  можно найти как
можно найти как
 Тогда
Тогда

 .
.
Если вершина резца будет расположена выше оси центров, знаки в формулах для определения углов и меняются на противоположные.
Кинематическое изменение углов резца
Рассмотрим кинематическое изменение углов проходного упорного резца при токарной обработке с продольной подачей (  ) (рис.15).
) (рис.15).
При отсутствии движения подачи DS углы резца рассматриваются в статической системе координат и соответственно равны  и
и  . В результате суммирования двух движений главного Dr и подачи Ds статическая система координат поворачивается на угол τ и переходит в кинематическую систему координат, которая уже ориентирована относительно направления вектора скорости результирующего движения (Ve), а углы будут равны
. В результате суммирования двух движений главного Dr и подачи Ds статическая система координат поворачивается на угол τ и переходит в кинематическую систему координат, которая уже ориентирована относительно направления вектора скорости результирующего движения (Ve), а углы будут равны  и
и  .
.
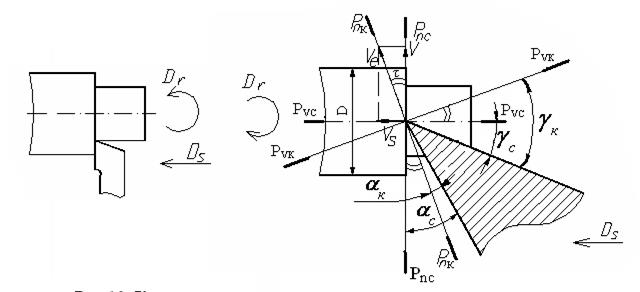
Рис.15 Кинематическое изменение углов резца при точении с
продольной подачей
Как видно из рисунка, передний угол g увеличился, а главный задний угол a уменьшился на величину угла τ:
Величину угла  можно найти как
можно найти как

С учетом этого

Если угол j будет отличен от 90о (j¹90°), то величина угла будет равна
а выражение для определения углов и будут равны:
Для обычных условий обработки угол τ имеет небольшое значение и им можно пренебречь, но в случае нарезания резьбы или при обработке с большими подачами эти изменения нужно учитывать.
Дата добавления: 2015-08-14; просмотров: 980;