Системы сбора данных
Эти системы представляют другой класс систем реального времени, которые обычно базируются на обобщенной архитектурной модели. Такие системы собирают данные с сенсоров в целях их последующей обработки и анализа.
Для иллюстрации этого класса систем рассмотрим модель, представленную на рис. 11.8. Здесь изображена система, собирающая данные с датчиков, которые измеряют поток нейтронов в ядерном реакторе. Данные, собранные с разных датчиков, помещаются в буфер, из которого затем извлекаются и обрабатываются. На мониторе оператора отображается среднее значение интенсивности потока нейтронов.

Рис. 11.8. Архитектура системы наблюдения за интенсивностью потока нейтронов
Каждый датчик связан с процессом, который преобразует аналоговый сигнал, показывающий интенсивность входного потока, в цифровой. Сигнал совместно с идентификатором датчика записывается в буфер, где хранятся данные. Процесс, отвечающий за обработку данных, берет их из буфера, обрабатывает и передает процессу отображения для вывода на операторную консоль.
В системах реального времени, ведущих сбор и обработку данных, скорости выполнения и периоды процесса сбора и процесса обработки могут не совпадать. Если обрабатываются большие объемы данных, сбор данных может выполнятся быстрее, чем их обработка. Если же выполняются только простые вычисления, быстрее происходит обработка данных, а не их сбор.
Чтобы сгладить разницу в скоростях сбора и обработки данных, в большинстве подобных систем для хранения входных данных используется кольцевой буфер. Процессы, создающие данные (процессы-производители), поставляют информацию в буфер. Процессы, обрабатывающие данные (процессы-потребители), берут данные из буфера (рис. 11.9).
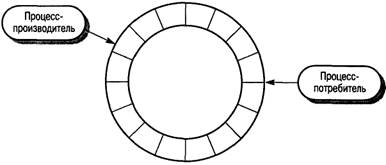
Рис. 11.9. Кольцевой буфер в системе сбора данных
Очевидно, необходимо предотвратить одновременный доступ процесса-производителя и процесса-потребителя к одним и тем же элементам буфера. Кроме того, система должна отслеживать, чтобы процесс-производитель не добавлял данные в полный буфер, а процесс-потребитель не забирал данные из пустого буфера.
В листинге 11.2 показана возможная реализация буфера данных как объекта Java. Значения в буфере имеют тип SensorRecord (запись данных датчика). Определены два метода– get и put: метод get берет элементы из буфера, метод put добавляет элемент в буфер. При объявлении типа CircularBuffer (кольцевой буфер) программный конструктор задает размер буфера.
Дата добавления: 2015-08-14; просмотров: 1227;