Лекция 12. Мостовые схемы постоянного тока используются для измерения активных сопротивлений
Мостовые схемы постоянного тока используются для измерения активных сопротивлений. В схеме моста, приведенном на рис. 6. а, комплексные сопротивления Zl - Z4 можно заменить активными сопротивлениями Rl — R4. Измерение сопротивления Rx осуществляется методом сравнения с образцовыми сопротивлениями, часть из которых должны быть регулируемыми. Если измеряемая величина определяется при нулевом отклонении указателя равновесия, то мост называется уравновешенным. В неуравновешенных мостах измеряемое сопротивление определяется по значению тока индикатора, отградуированного в единицах сопротивления. Одинарные мосты используются для измерения сопротивлений от десятков Ом и выше. При измерении малых сопротивлений возникают погрешности, обусловленные влиянием соединительных проводов и переходных сопротивлений контактов. Для исключения влияния этих сопротивлений измеряемое сопротивление Rx (рис. 6, б) присоединяется по четырех-зажимной схеме включения: двумя токовыми зажимами оно включается в цепь источника питания моста, а двумя потенциальными — в измерительную цепь. Аналогичное включение имеет также образцовое сопротивление R0q„- Такие мостовые схемы обеспечивают измерение сопротивление от 10'8 Ом. Погрешность измерения мостовых схем в зависимости от измеряемых сопротивлений находится в диапазоне от тысячных долей процента до единиц процентов.
Для измерения емкости, индуктивности и других параметров цепей переменного тока используются мосты переменного тока. Схемы мостов переменного тока отличаются разнообразием. Особенностью мостов переменного тока является необходимость при уравновешивании регулирования не менее двух
параметров моста. Процесс уравновешивания заключается в попеременном регулировании этих параметров. Все большее распространение получают трансформаторные мосты переменного тока, имеющие ряд преимуществ по сравнению с обычными мостами.
Новым направлением создания СИ параметров цепей является разработка приборов с микропроцессорами, выполняющими функции управления процессом измерения, улучшающими технические и метрологические характеристики, расширяющими функциональные возможности приборов.
В цифровых измерительных приборах (ЦИП) непрерывный сигнал преобразуется в дискретный выходной сигнал, представленный в цифровой форме (рис. 7). Преимущества ЦИП перед аналоговыми приборами обусловлены малой погрешностью измерений, высокой чувствительностью, большим быстродействием, отсутствием субъективной ошибки отсчета результата измерений, возможностью автоматизации процесса измерения и простой реализации возможности документирования результата измерений.
Аналого-цифровой преобразователь (АЦП) выполняет операции квантования аналоговой величины по уровню и по времени. На его выходе вырабатывается дискретный сигнал, который в виде кода вводится в ЭВМ или преобразуется в от-счетном устройстве в цифровой отсчет. Схемная реализация АЦП и алгоритм его работы определяется видом входной и выходной величины и заданными характеристиками прибора.
ЦИП обеспечивают измерения напряжения постоянного тока; силы постоянного тока; напряжения переменного тока; силы переменного тока; временных параметров (частоты, периода, временного интервала, фазы); параметров элементов электрических цепей — сопротивления, емкости, индуктивности.
АЦП предназначены для ввода информации, представленной в виде дискретных сигналов, в ЭВМ или другие

|
устройства. АЦП должны обладать высоким быстродействием, определяемым скоростью изменения измеряемой величины, и не имеют отсчетного устройства. АЦП выполняют обычно однопредель-ными и наряду с цифроаналоговыми преобразователями (ЦАП) их используют в качестве модулей различных измерительных устройств. Современные ЦИП имеют достаточно высокие технические характеристики, которые реализуются в связи с использованием достижений современной элементной базы и схемотехники. Предельные технические характеристики ЦИП приведены в табл. 5.
Значительному прогрессу цифровых СИ способствует применение микропроцессоров (МП). На их основе создаются новые поколения программируемых приборов, универсальных многофункциональных приборов. Помимо пяти основных величин (постоянные и переменные напряжения, токи и сопротивление) они могут измерять емкость, проводимость, частоту следования импульсов, электрическую мощность, угол сдвига фаз и т. д. В ЦИП микропроцессоры могут выполнять автокалибровку, самодиагностику, математическую обработку результатов измерений, линеризацию характеристик измерительных преобразователей, коррекцию нуля. Кроме того, МП управляют временем измерения и процессом преобразования, осуществляют автоматический выбор диапазона и выполняют функции интерфейса.

|
Алгоритмы калибровки МП измерительного тракта могут быть разными по внетреннему и внешнему источникам эталонного напряжения и по внутренним образцовым мерам, значения параметров которых запоминаются калибровочным запоминающим устройством, но при любом способе автокалибровки устраняется влияние многих факторов на погрешность и точность измерений повышается. Благодаря автоматической коррекции смещения нуля точность измерений повышается также. Применение МП для автоматизации калибровки и коррекции погрешностей позволяет существенно снизить метрологические требования к элементной базе и блокам аналоговой части прибора, сократить число калибровочных операций и выделить прецизионные элементы в самостоятельный блок, который можно по-
верять (аттестовывать) отдельно от прибора.
В процессе автоматической диагностики в память МП заносится программа, определяющая порядок тестовых операций, заключающихся в подаче на функциональные узлы прибора контрольных сигналов и сравнении реальных сигналов на выходе с номинальными. Благодаря МП можно осуществлять многократные измерения и проводить статистическую оценку данных, что значительно снижает влияние помех, а точность и качество измерений повышает.
Вследствие использования МП в ЦИП существенно упрощаются традиционные способы.обращения с прибором. Благодаря МП оптимальный предел измерения выбирается автоматически последовательно ступенями либо скачкообразно. При этом быстродействие приборов с МП увеличивается в несколько раз. В некоторых моделях ЦИП предусматривается отключение отсчетного устройства до момента установления предела измерения, что избавляет оператора от неприятного мелькания цифр. Применение МП обеспечивает возможность программной реализации интерфейсных функций. Цифровые мосты с МП позволяют измерять не только сопротивление, емкость и индуктивность, но и определять активную проводимость, добротность и тангенс угла потерь. МП вычисляет процентные отклонения измеряемых величин от номинальных значений и контролирует заданные пределы измерения, что позволяет сортировать элементы цепей по допускам. МП обеспечивает выбор режима измерений (однократный, непрерывный или усредненный), уровня сигналов на измеряемом элементе, рабочей частоты и скорости измерений.
Измерительные информационные системы (ИИС). Измерительно-вычислительные комплексы (ИВК). Под ИИС понимаются автоматизированные средства исследования объектов, имеющие сложную структуру, предназначенные для решения следующих задач: а) прямых, косвенных или совокупных измерений физических (электрических) величин - параметров объекта; б) управления процессом исследования, воздействия на объект с целью исследования его свойств; в) обработки результатов исследования и представления их экспериментатору в требуемом виде.
Измерительные информационные системы появились в связи с усложнением объекта исследования, увеличением многообразия и числа измеряемых параметров; переходом к испытаниям (и получению их результатов) в реальном времени как к средству сокращения числа испытаний; необходимостью автоматизации измерений, как средства решения указанных выше задач, возможностью адаптироваться к объекту
программным путем, гибко менять структуру и параметры системы.
Можно выделить ядро ИИС, инвариантное к конструктивным особенностям, объекта, причем на основе одного типа такого устройства можно компоновать ИИС для различных объектов. Это ядро ИИС называется измерительно-вычислительным комплексом (ИВК).
По назначению и широте применения различают ИВК:
1) типовые, предназначенные для
автоматизации измерений и исследова
ний, независимо от области применения;
2) проблемно-ориентировочные, предназначенные для исследования в конкретной, достаточно широкой области, например исследования двигателей внутреннего сгорания, исследования физико-механических свойств материалов и т. д.;
3) специализированные, предназначенные для автоматизации эксперимента в узкой области, например ИВК для испытаний конкретных образцов техники, выпускаемых крупными сериями.
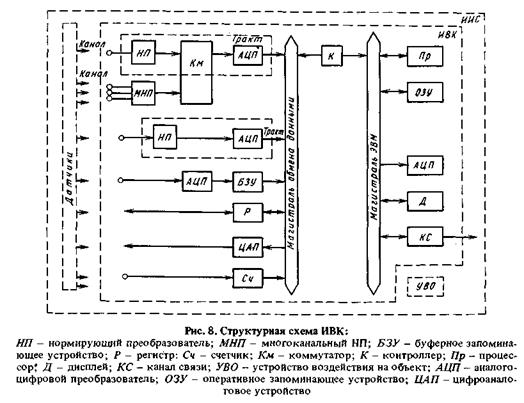
Типовая структура ИВК и его место в структуре ИИС приведена на рис. 8.
ИВК состоит из двух основных частей:
управляюще-вычислительной, реализуемой, как правило, на универсальной ЭВМ (управляющей, персональной и др.), либо на свободно программируемом процессоре (микропроцессорном комплексе);
сбора данных, содержащая многоканальные тракты ввода-вывода измерительных сигналов, ввода-вывода аналоговых сигналов и данных, представленных в виде цифровых и дискретных сигналов.
Вычислительная часть ИВК содержит, как правило, полный набор периферийных устройств, обеспечивающих пользователю возможность управления комплексом в автоматическом и ручном режимах, представления оперативной информации и результатов эксперимента оператору в требуемом виде, создания и отладки специального прикладного программного обеспечения (программ
|


 пользователя) — дисплеи, оперативное запоминающее устройство, накопитель на гибких магнитных дисках или магнитной ленте, АЦП и др.
пользователя) — дисплеи, оперативное запоминающее устройство, накопитель на гибких магнитных дисках или магнитной ленте, АЦП и др.
Подсистема сбора данных содержит цепочки последовательно соединенных компонентов, каждая из которых образует тракт ввода (вывода) соответствующих величин (сигналов, параметров объекта и др.), причем измерительные тракты отличаются нормированием метрологических характеристик (точности, быстродействия, дипазона измерения, параметров входных и выходных цепей и т. д.). Каждый тракт рассчитан на измерение (преобразование) определенной величины (напряжения низкого или среднего уровней, температуры, сопротивления и др.) и может иметь несколько входов (каналов), к которым подключаются датчики этих величин.
Обе части ИВК (вычислительная и подсистема сбора данных) могут либо выходить на общую магистраль обмена данными, либо иметь различные магистрали: магистраль ЭВМ и машинонезави-симую магистраль обмена данными между ЭВМ.
В последнем случае обмен данными между ЭВМ и подсистемой сбора данных осуществляется через блоки-контроллеры.
Важнейшим компонентом ИВК является программное обеспечение (ПО), включающее системное ПО и общее прикладное ПО.
Системное ПО содержит операционную систему, обеспечивающую отладку и выполнение программ пользователя в требуемом режиме, например диалоговом, а также драйверные программы, обеспечивающие управление аппаратными компонентами ИВК, и программы
Л13
Дата добавления: 2015-08-14; просмотров: 1598;