Роль силовых воздействий в жизнедеятельности организмов.
В живой природе и технике физическое взаимодействие тел реализуется с помощью сил, в результате воздействия которых возникает ускоренное движение. Ускоренное движение, в свою очередь, изменяет кинематические и динамические характеристики тела. Вследствие этого все движущиеся тела, будь то летательный аппарат, промышленный робот или живой организм, которым необходимо решать задачи управления взаимодействием с другими телами и объектами, нуждаются в информации о силовых воздействиях.
Рассмотрим процесс изменения внутреннего состояния тела, вызванный его ускоренным движением. Если внешняя сила приложена к одной из частиц тела, она не может вызвать мгновенного движения всего тела. Вначале начинает двигаться лишь частица, подверженная непосредственному силовому воздействию. Затем, благодаря наличию упругих связей между частицами тела, силовое воздействие постепенно передается дальше, охватывая весь его объем. Только после завершения этого процесса вся масса тела начинает двигаться ускоренно.
Неодновременное “включение” в движение отдельных частиц тела вызывает их относительное перемещение, в результате которого появляются внутренние силы взаимодействия и напряжения между частицами, вызывающие деформацию тела. Именно эти внутренние силы и деформации могут быть обнаружены чувствительными органами в живых организмах или измерительными устройствами на технических объектах.
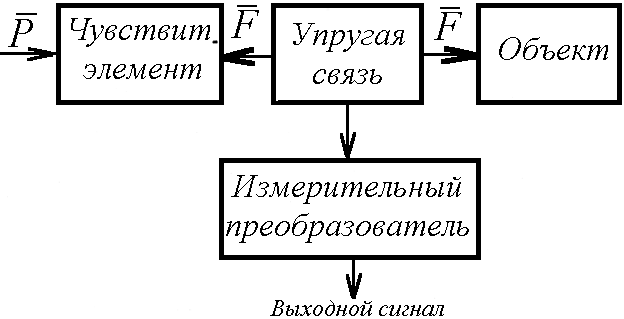
Рис.1. Обобщенная схема измерителя силовых воздействий.
Следовательно, обобщенная схема измерителя силовых воздействий включает три основных функциональных компонента (рис. 1):
· чувствительный элемент в виде инерционной массы, который может находиться как внутри, так и на поверхности объекта;
· упругую связь между чувствительным элементом и объектом;
· измерительный преобразователь, воспринимающий относительные движения чувствительного элемента или деформации упругой связи и преобразующий их в сигнал, удобный для дальнейшей обработки.
Органы чувств различных животных, воспринимающие силовые воздействия, можно разделить на четыре группы:
² измерители мышечных усилий;
² измерители воздействий объектов окружающей среды;
² измерители результирующей активной силы;
² измерители вращающих моментов.
Рассмотрим упрощенные модели этих биодатчиков
Дата добавления: 2015-08-11; просмотров: 876;