Микропроцессорная система управления и диагностики МПСУ и Д
МПСУ и Д включает в себя микропроцессорную систему управления локомотивом (МСУЛ-А), подсистему аналоговых измерений (подсистема СИ), подсистему автоведения (подсистема А) и подсистему диагностики (подсистема Д).
МПСУ и Д обеспечивает:
· автоматизированное управление в режимах «Ручное регулирование» и «Авторегулирование» с учетом профиля пути и сигналов, получаемых от датчиков и аппаратов электровоза;
· контроль состояния оборудования и агрегатов электровоза;
· диагностику оборудования и агрегатов электровоза.
Ниже приведен перечень блоков, входящих в МПСУ и Д, в скобках указано их сокращенное название на рисунках и схемах.
Состав системы МСУЛ-А:
· блок связи с пультом (БСП);
· блок управления контакторами (БУК-3);
· блок входных сигналов (БВС);
· блок центрального вычислителя (БЦВ);пульт управления (ПУ-МСУЛ);
· комплект мониторного блока (монитор, клавиатура);
· источник питания локомотивной электронной аппаратуры (ИП-ЛЭ).
Состав подсистемы СИ (система измерений):
· блок связи со средствами измерения (БС-СИ);
· преобразователь напряжения в код (ПНКВ);
· делитель напряжения (ДН);
· датчик давления (преобразователь) (ДД);
· блок связи с ДД (БС-ДД);
· измеритель сопротивления изоляции (МГМ);
· счетчик электрический постоянного тока (СКВТ).
Состав подсистемы А:
· блок автоведения (БА).
МПСУ и Д обеспечивает совместную работу с другими системами и подсистемами электровоза:
· с системой автоматического управления торможением поезда (САУТ-ЦМ/485К);
· с комплексным локомотивным устройством безопасности (КЛУБ-У);
· с системой взаимодействия с локомотивом посредством цифровой технологической радиосвязи (СВЛ ТР);
· с подсистемой авторегулирования (подсистема ПСН);
· с подсистемой выявления боксования и юза (подсистема ПБЗ).
Все устройства входящие в МПСУ и Д и взаимодействующие с ней разделяются на три уровня:
1-й уровень:
· подсистема СИ;
· подсистема ПСН (в МПСУ и Д не входит);
· подсистема ПБЗ (в МПСУ и Д не входит).
2-й уровень: система МСУЛ-А.
3-й уровень:
· подсистема А (автоведение);
· подсистема Д (диагностики);
· система СВЛ ТР (в МПСУ и Д не входит).
Электропитание МПСУ и Д двухканальное и осуществляется от бортовой сети через источники питания ИП-ЛЭ (см. рисунок 1.13). Электропитание каждого канала осуществляется от своего ИП-ЛЭ, что позволяет в случае неисправности одного источника электропитания (или одного канала) продолжать работу МПСУ и Д.
Организация обмена информацией приведена на рисунке 1.14. Для связи систем 2-го и подсистем 3-го уровней использован интерфейс CAN 2,0. Для связи системы 2-го и подсистем 1-го уровней используется сдвоенный (с резервированием) интерфейс RS485. В каждой линии связи присутствует информация от трех каналов МСУЛ-А, т.к. для обеспечения надежности режимов работы главные узлы МСУЛ-А выполнены трехканальными.
Блоки, входящие в состав МСУЛ-А одной секции, соединены между собой двумя независимыми линиями связи стандарта RS485. Блоки подсистемы СИ соединены между собой одноканальной линией связи, но информация от них дублируется в блоке БС-СИ на оба канала МСУЛ-А. Применение двухканальной линии связи позволяет МСУЛ-А при повреждении одного из каналов сохранять работоспособность.
Для связи отдельных секций локомотива также используется двухканальная линия связи стандарта RS485, но с увеличенным до 12 В напряжением.
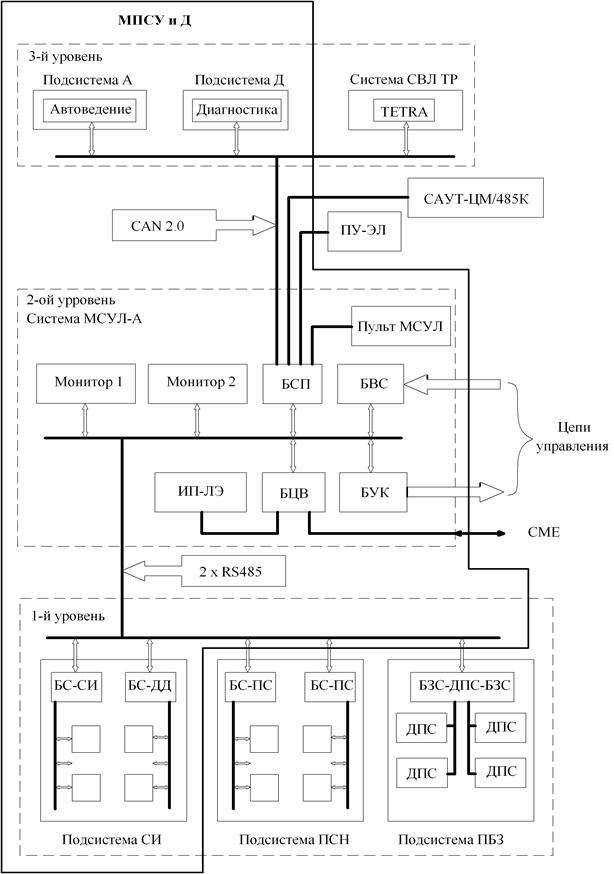
Рисунок 13 – Организация обмена информации
Система МПСУ и Д строит свою работу по управлению электровозом на основе поступающих в нее входных аналоговых и дискретных сигналов. Входные аналоговые сигналы приведены в таблице 1.6.
Таблица 1.6 – Входные аналоговые сигналы
| Наименование | № канала | Макси- мальное значение | Обозначение параметра | Датчик |
| Напряжение контактной сети | 5040 В | Uks | UZ1, UZ2 | |
| Ток якоря тяговых двигателей 1-2 | ±1008 А | Ia1 | UZ5, UZ10 | |
| Ток якоря тяговых двигателей 3-4 | ±1008 А | Ia2 | UZ6, UZ11 | |
| Ток возбуждения тяговых двигателей 1-2 | 1008 А | Iv3 | UZ7 | |
| Ток возбуждения тяговых двигателей 3-4 | 1008 А | Iv4 | UZ8 | |
| Ток в цепи собственных нужд секции | 126 А | Ivsp | UZ9 | |
| Напряжение на якорях ТЭД | 5040 В | Etd | UZ3, UZ4 |
Датчики тока и напряжения для сигналов таблицы 1.6 должны включаться так, чтобы напряжения имели указанные в таблице знаки в режиме тяги.
Входными дискретными сигналами являются:
· от замыкания контактов ПУ-МСУЛ, в т.ч.:
- переход на следующую позицию «+1»;
- автоматический сброс позиций «-А».
· от замыкания контактов органов управления ПУ-ЭЛ, в т.ч.:
- включение цепей управления;
- переход на следующую позицию «+1»;
- переход на предыдущую позицию «-1»;
- автоматический набор позиций «+А»;
- автоматический сброс позиций «-А»;
- переход в режим выбега «В»;
- увеличение уставки силы тяги-торможения (+С);
- уменьшение уставки силы тяги-торможения (-С);
- отключение тяговых электродвигателей «1-2» (для каждой секции);
- отключение тяговых электродвигателей «3-4» (для каждой секции);
- отключена секция (для каждой секции);
- продувка главных резервуаров «Продувка»;
- обогрев спускных кранов главных резервуаров «Обогрев кранов»;
- освещение ходовых частей «Освещение ходовых частей»;
- отключение защиты выявления боксования и юза «Защита боксов. выкл.»;
- режим работы секции (головная или прицепная) «Головная <номер секции>»;
- яркость индикаторов «Яркость индикаторов» (не используется);
- принудительное включение компрессора «Принудительное вкл. компрессора»;
- включение компрессора «Вкл. компрессора»;
- включение вентиляторов «Вентиляторы»;
- включение реверсора вперед «Вперед»;
- включение реверсора назад «Назад»;
- подъем токоприемника в секции <номер> (четыре сигнала) «Секция <номер>»;
- включение быстродействующего выключателя «БВ»;
- отпуск тормозов «Отпуск тормозов»;
- режимы «Фиксация скорости;
- подача песка «Песок принудительно»;
- включение мегомметров (два) «Включение мегомметра»;
· от аппаратов электровоза (состояние включено/выключено или положение), в т.ч.:
- переключатель реверсивный QP1 (положение «Вперед») – «Контроль QP1в»;
- переключатель реверсивный QP1 (положение «Назад») – «Контроль QP1н»;
- переключатель режимный QP2 (положение «Независимое возбуждение») – «Контроль QP2Н»;
- переключатель режимный QP2 (положение «Последовательное возбуждение») – «Контроль QP2П»;
- электропневматический контактор К28 «К28»;
- электропневматический контактор К29 «К29»;
- электропневматический контактор К30 «К30»;
- электропневматический контактор К36 «К36»;
- электропневматический контактор К37 «К37»;
- электропневматический контактор К38 «К38»;
- электропневматический контактор К39 «К39»;
- электропневматический контактор К40 «К40»;
- быстродействующий контактор К41 или К42 «К41 или К42»;
- мотор-компрессор М13 - «Готовность компрессора»;
- мотор-компрессор М13 - «Запрет»;
- мотор-компрессор М13 - «Авария»;
- заземлитель QS2 – «Контроль QS2-1»;
- разъединитель QS1 – «Контроль QS1-1»;
- ПСН-200 – «Включение преобразователя 1-я ступень»;
- ПСН-200 – «Включение преобразователя 2-я ступень»;
- токоприемник «Контроль подъема токоприемника»;
- блокировки высоковольтных камер - «Блокировка ВВК»;
- устройство управления быстродействующими контакторами А3 - «Контроль включения УУБК»;
- ЭПК – подача песка при V≥10 км/ч – «При экстренном торможении и срыве ЭПК»;
- быстродействующий выключатель QF1 - «Включение БВ»;
- дифференциальное реле КА1 - «Дифф. реле ТД»;
- дифференциальное реле КА2 - «Дифф. реле вспом. машин»;
- схема цепи «Выбег» - «Режим Выбег»;
- переключатели QR1 и QR2 - «Последовательное возбуждение»;
- бесконтактные выключатели SQ1…SQ4 – «Контроль жалюзи»;
- устройство контроля обрыва тормозной магистрали «разбор схемы при нарушении целостности ТМ». ДЭП (воздухораспределитель) датчик ДДР.
Выходные дискретные сигналы.
Перечень аппаратов, управление которыми осуществляется системой МПСУ и Д.
1. Электропневматические контакторы с К1 по К40
2. Электромагнитные контакторы:
· КМ1 - включение первой ступени пуска преобразователя;
· КМ2 - включение второй ступени пуска преобразователя;
· КМ10, КМ11 - включение цепей управления;
· КМ14 – управление освещением ходовых частей;
· КМ15 – обогрев кранов;
· КМ17 – возврат защиты.
3. Электромагнитные вентили:
· QP1в - положение реверсора «ВПЕРЕД»;
· QP1н - положение реверсора «НАЗАД»;
· QP2н – переключатель «Независимое Возб.»;
· QP2п – переключатель «Последовательное Возб.»;
· QS1-1 – разъединитель «Вкл.»;
· QS1-2 – разъединитель «Выкл.»;
· OS2-1 – заземлитель «Вкл.»;
· OS2-2 – заземлитель «Выкл.»;
· КЭП1 – управление токоприемником;
· КЭП6, КЭП7 – продувка резервуаров 1;
· КЭП8, КЭП9 – продувка резервуаров 2;
· КЭП10 – жалюзи ПТР открыты;
· КЭП16, КЭП17 – управление «Песок вперед»;
· КЭП18, КЭП19 – управление «Песок назад»;
· ЭПВ – включение пневматических тормозов при срыве рекуперации;
· КЭБ1 – блокировочный клапан;
· КЭБ2 – отпуск тормозов;
4. Реле промежуточные:
· РП2 – управление подпиткой дифференциальное реле ТД при переходе с соединения «С» на «СП»;
· РП6 – управление включением мегомметра;
· РП8 – включение блока УУБК;
· РП9 – управление быстродействующим выключателем;
· РП11 – включение блока управления мотор-компрессора.
ВНИМАНИЕ!
Дата добавления: 2015-08-04; просмотров: 10292;