Умови інваріантності
Розглянемо умови інваріантності розімкненої системи (рис.4.2.): Y(t) = 0.
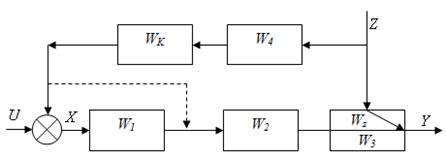
Рис. 4.2. Структурна схема розімкненої АСР
Вважаємо, що u = cоnst,а збурюючий сигнал Z діє на вихідну координату Y двома шляхами – по каналах Z →Y або Z →X→ Y . В операторній формі рівняння для вихідного сигналу має вигляд:
Y(s) = Z(s)[Wz(s)+W1(s)W2(s)W3(s)W4(s)5Wк(s)]=0 /4.1/
За наявності збурення Z(s) ¹ 0 умова інваріантності /4.1/ виконується, якщо:
Wz(s)+ W1(s)W2(s)W3(s)W4(s)Wк(s)=0
З /4.1/ можна знайти передаточну функцію, яку повинен мати компенсатор, щоб виконувалась умова інваріантності:
 /4.2/
/4.2/
Таким чином, щоб забезпечити інваріантність системи регулювання відносно якого-небудь збурення необхідно встановити динамічний компенсатор, передаточна функція якого дорівнює відношенню передаточної функції об’єкта по каналу збурення до передаточної функції еквівалентного об’єкту, взятого з протилежним знаком.
Якщо компенсуючий сигнал надходить на вхід виконавчого механізму, то умова інваріантності набере вигляду
Wz(s)+W2(s)W3(s)W4(s)Wк(s)=0 /4.3/
Одержимо умови інваріантності для комбінованої АСР, якщо компенсуючий сигнал надходить на вхід регулятора (див. рис. 4.1, а). У цьому разі передаточна функція комбінованої системи регулювання по каналу Z →Y набере вигляду:
 /4.4/
/4.4/
Умова інваріантності комбінованої системи полягає в тому, що чисельник передаточної функції має дорівнювати нулю. Таким чином, у разі ввімкнення виходу компенсатора на вхід регулятора передаточна функція компенсатора, одержана з умови інваріантності, залежатиме від характеристик не лише об’єкта, а й регулятора.
Дата добавления: 2015-07-30; просмотров: 949;