ДЕРЖАВНА ГЕОДЕЗИЧНА РЕФЕРЕНЦНА СИСТЕМА
КООРДИНАТ УСК-2000 ТА її ЗВ'ЯЗОК ЗІ СВІТОВИМИ
І ЄВРОПЕЙСЬКИМИ СИСТЕМАМИ КООРДИНАТ
2.1. Загальні відомості про референцні системи координат
Місцеположення точки (будь-якого географічного об'єкта) на по-верхні Землі або біля неї може бути описане за допомогою координат. Ці координати мають однозначність тільки тоді, коли повністю визна-чена референцна система координат, до якої віднесені ці координати. Референцна система складається з поверхні відносності (datum) і з системи координат (coordinate system) (це визначення референцної системи координат згідно зі стандартом ISO 19111).
Існує багато різних референцних систем координат. У кожній з них координати місцеположення об'єкта будуть різними. Для інтерпретації отриманих координат необхідно знати, до якої системи віднесені ці координати, і математичну модель цієї системи. При необхідності переходу з однієї системи в іншу необхідно знати параметри зв'язку між цими системами.
Визначення геодезичної поверхні відносності (geodetic datum) — референц-еліпсоїд - включає в себе визначення параметрів еліпсоїда, його положення відносно центру мас Землі та його орієнтацію в тілі Землі. Як правило для кожної країни існує щонайменше одна модель референц-еліпсоїда. Також майже кожна країна приймає картогра-фічну проекцію (Ламберта, Меркатора, Гаусса-Крюгера, азимутальну тощо), яку вибирають шляхом мінімізації спотворень на її територію.
Визначення вертикальної поверхні відносності грунтується на вста-новленні початку відліку на рівневих постах. При використанні рів-невих постів для визначення початку відліку висот допускають збіг середнього рівня моря на цих постах із поверхнею геоїду. В основ-ному використовують три типи висот: ортометричні, нормальніта геодезичні.
Іноді горизонтальні та вертикальні компоненти визначення місцепо-ложення у просторі можуть відноситися до різних референцних систем координат. Тоді комбінована (просторова) референцна система коор-динат може бути зображена так (на прикладі ETRS89), як наведено на рис. 2.1.
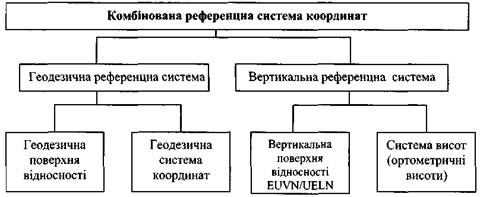
Рис. 2.1. Комбінована референцна система координат
2.2. Міжнародна земна референцна система відліку (ITRF)
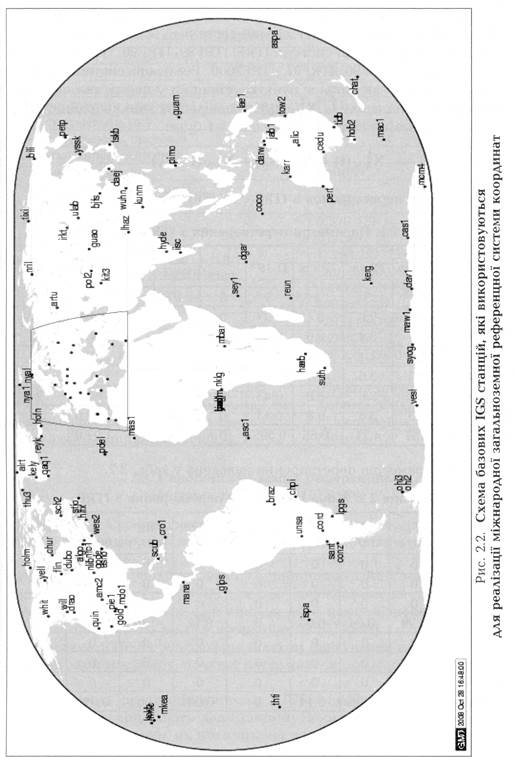
ITRF — це загальноземна система відліку, яку задають і уточнюють Міжнародною службою обертання Землі (IERS) (рис. 2.2) [19, 21].Її визначає резолюція № 2, прийнята на 20-ій Генеральній асамблеї IUGG у Відні в 1991 році. В ITRF положення будь-якої точки на поверхні Землі задається таким чином:
 (2.1)
(2.1)
де  — поправки за різні часові ефекти,
— поправки за різні часові ефекти,  та
та  — місцеполо-
— місцеполо-
ження і швидкість, приведена на епоху  .
.
Ці поправки враховують зміну форми Землі під впливом припливно-відпливних факторів небесних світил, впливів океанів, льодовиків та атмосфери [26-28].
Систему ITRF реалізує IERS, яка задається каталогом координат і швидкостей їх зміни щодо низки пунктів IERS (перманентних станцій), розміщених по всій земній кулі. Каталоги реалізації ITRFyy щорічно видають IERS. Значення yy — відповідають рокові, дані якого були використані при реалізації системи. Так, ITRF94 означає систему від-ліку, створену в 1995 році, для створення якої були використані дані за 1994 рік.
Земна система відліку може бути визначена в системах, які по-різному враховують припливи та відливи (різні системи врахування впливів факторів Місяця, Сонця тощо). Можна виділити три таких системи: нульова, середня, вільна. В нульовій системі усунуто прямі впливи Місяця та Сонця, але не усунуто непрямий вплив, пов'язаний
із еластичною зміною земної поверхні під впливом Сонця, Місяця та інших факторів [20, 23, 25, 29]. У вільній системі — всі ці впливи усунуто. Відомі такі реалізації системи ITRF: ITRF89, ITRF90, ITRF91, ITRF92, ITRF93, ITRF94, ITRF96, ITRF97, ITRF2000. Реалізації системи ITRF -ITRFyy видаються як каталог пунктів (станцій), у якому вказані координати пункту на епоху  та швидкості змін координат
та швидкості змін координат  Таким чином положення точки на епоху t буде:
Таким чином положення точки на епоху t буде:
 (2.2)
(2.2)
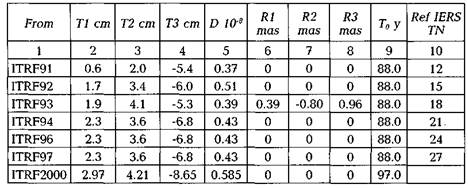
Параметри перетворення з ITRFyy до ITRF89 наведені у табл. 2.1.
Таблиця 2.1. Параметри перетворення з ITRFyy до ITRF89
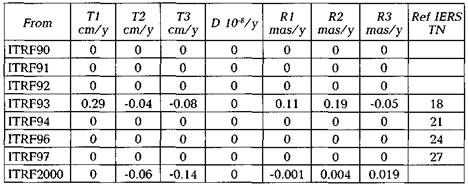
Зміна параметрів перетворення наведена у табл. 2.2.
Таблиця 2.2. Зміна параметрів перетворення з ITRF
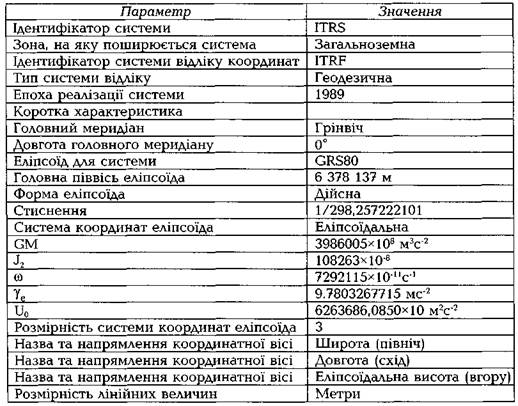
Основні параметри системи ITRF наведено в табл. 2.3.
Таблиця 2.3. Параметри системи ITRF
Дата добавления: 2015-06-27; просмотров: 7199;